齿轮副综合啮合目标刚度确定方法及装置与流程
本公开实施例涉及齿轮测量,尤其涉及一种齿轮副综合啮合目标刚度确定方法及装置。
背景技术:
1、齿轮啮合刚度是齿轮传动系统重要的内激励来源,开展齿轮啮合刚度计算研究可为齿轮传动系统动态服役性能校核和预测提供理论参考。然而,齿轮传动系统运转过程中,传动系统构件如轴承等会出现弹性变形,导致齿轮副啮合齿对载荷分配情况发生变化,改变齿轮副综合啮合刚度。
2、目前,齿轮动力学研究中主要基于能量法计算静态条件下的齿轮副啮合刚度,然后将啮合刚度作为输入参数输入动力学模型,分析系统的动力学性能。但是这种计算方式在动态条件下,会限制齿轮传动系统动力学建模精度。
3、因此,亟需一种齿轮副综合啮合目标刚度确定方法,能够准确地确定齿轮副综合啮合目标刚度,并提高齿轮传动系统动力学建模的精度。
技术实现思路
1、为了解决上述技术问题或者至少部分地解决上述技术问题,本公开实施例提供了一种齿轮副综合啮合目标刚度确定方法及装置。
2、本公开实施例的第一方面提供了一种齿轮副综合啮合目标刚度确定方法,该方法包括:
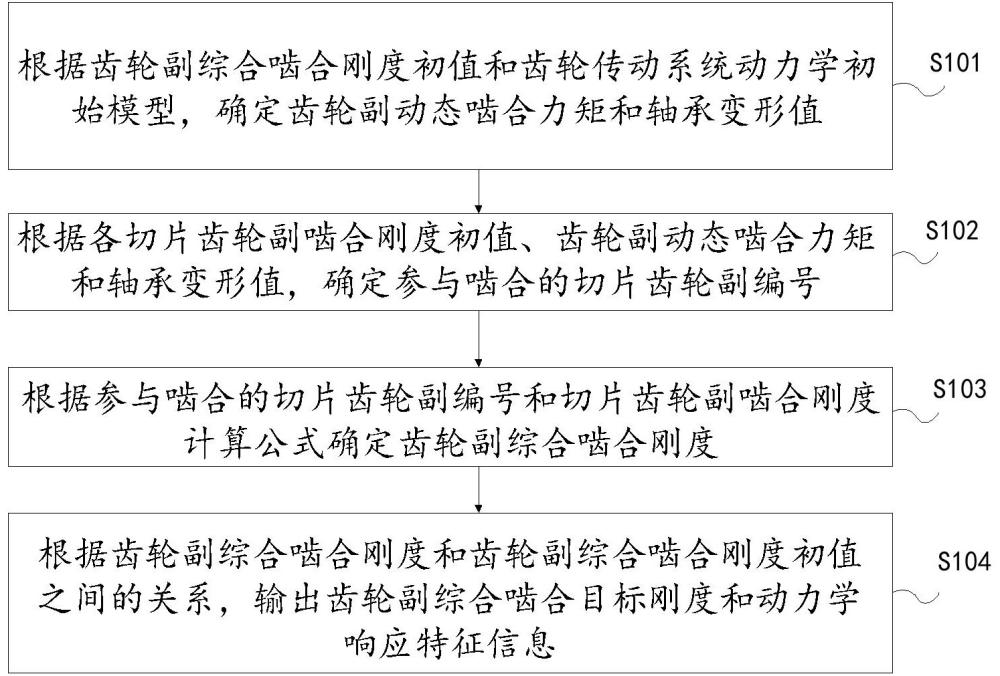
3、根据齿轮副综合啮合刚度初值和齿轮传动系统动力学初始模型,确定齿轮副动态啮合力矩和轴承变形值;
4、根据各切片齿轮副啮合刚度初值、所述齿轮副动态啮合力矩和所述轴承变形值,确定参与啮合的切片齿轮副编号;
5、根据所述参与啮合的切片齿轮副编号和切片齿轮副啮合刚度计算公式确定齿轮副综合啮合刚度;
6、根据所述齿轮副综合啮合刚度和所述齿轮副综合啮合刚度初值之间的关系,输出齿轮副综合啮合目标刚度和动力学响应特征信息;其中,所述动力学响应特征信息表征的是齿轮副动态啮合目标力矩和目标轴承变形值;所述齿轮副综合啮合目标刚度和所述动力学响应特征信息用于确定轴承设计参数。
7、在一个示例中,所述各切片齿轮副啮合刚度初值、根据所述齿轮副动态啮合力矩和所述轴承变形值,确定参与啮合的切片齿轮副编号,包括:
8、根据所述轴承变形值和预设的啮合轮齿切片公式,确定各切片齿轮副啮合误差;
9、根据所述各切片齿轮副啮合误差、所述齿轮副动态啮合力矩、各切片齿轮副啮合刚度初值和切片齿轮副之间的载荷-变形协调方程,确定参与啮合的切片齿轮副编号。
10、在一个示例中,所述根据所述参与啮合的切片齿轮副编号和切片齿轮副啮合刚度计算公式确定齿轮副综合啮合刚度,包括:
11、根据所述各切片齿轮副啮合误差、所述参与啮合的切片齿轮副编号和切片齿轮副啮合刚度计算公式确定齿轮副综合啮合刚度。
12、在一个示例中,所述根据所述各切片齿轮副啮合误差、所述参与啮合的切片齿轮副编号和切片齿轮副啮合刚度计算公式确定齿轮副综合啮合刚度,包括:
13、根据所述各切片齿轮副啮合误差、所述参与啮合的切片齿轮副编号和切片齿轮副啮合刚度计算公式确定各切片齿轮副啮合刚度;
14、根据所述各切片齿轮副啮合刚度确定所述齿轮副综合啮合刚度。
15、在一个示例中,所述根据所述齿轮副综合啮合刚度和所述齿轮副综合啮合刚度初值之间的关系,输出齿轮副综合啮合目标刚度和动力学响应特征信息,包括:
16、若所述齿轮副综合啮合刚度和所述齿轮副综合啮合刚度初值之间的关系满足预设条件,则确定所述齿轮副综合啮合刚度为所述齿轮副综合啮合目标刚度,确定所述动力学响应特征信息为所述齿轮副动态啮合力矩和所述轴承变形值;
17、若所述齿轮副综合啮合刚度和所述齿轮副综合啮合刚度初值之间的关系不满足预设条件,则将所述齿轮副综合啮合刚度作为齿轮副综合啮合刚度初值,将各切片齿轮副啮合刚度作为各切片齿轮副啮合刚度初值,返回执行根据齿轮副综合啮合刚度初值和齿轮传动系统动力学初始模型,确定齿轮副动态啮合力矩和轴承变形值,直至齿轮副综合啮合刚度和齿轮副综合啮合刚度初值之间的关系满足预设条件,输出齿轮副综合啮合目标刚度和动力学响应特征信息。
18、在一个示例中,所述齿轮传动系统动力学初始模型包括齿轮副动力学模型和轴承动力学模型。
19、在一个示例中,在所述根据所述齿轮副综合啮合刚度初值、各切片齿轮副啮合刚度初值和齿轮传动系统动力学初始模型,确定齿轮副动态啮合力矩和轴承变形值之前,所述方法还包括:
20、获取预先配置的齿轮参数和工况参数;
21、根据所述齿轮参数和所述工况参数确定所述齿轮副综合啮合刚度初值及各切片齿轮副啮合刚度初值。
22、本公开实施例的第二方面提供了一种齿轮副综合啮合目标刚度确定装置,包括:
23、第一确定模块,用于根据齿轮副综合啮合刚度初值和齿轮传动系统动力学初始模型,确定齿轮副动态啮合力矩和轴承变形值;
24、第二确定模块,用于根据各切片齿轮副啮合刚度初值、所述齿轮副动态啮合力矩和所述轴承变形值,确定参与啮合的切片齿轮副编号;
25、第三确定模块,用于根据所述参与啮合的切片齿轮副编号和切片齿轮副啮合刚度计算公式确定齿轮副综合啮合刚度;
26、输出模块,用于根据所述齿轮副综合啮合刚度和所述齿轮副综合啮合刚度初值之间的关系,输出齿轮副综合啮合目标刚度和动力学响应特征信息;其中,所述动力学响应特征信息表征的是齿轮副动态啮合目标力矩和目标轴承变形值;所述齿轮副综合啮合目标刚度和所述动力学响应特征信息用于确定轴承设计参数。
27、在一个示例中,所述第二确定模块,包括:
28、第一确定子模块,用于根据所述轴承变形值和预设的啮合轮齿切片公式,确定各切片齿轮副啮合误差;
29、第二确定子模块,用于根据所述各切片齿轮副啮合误差、所述齿轮副动态啮合力矩、所述各切片齿轮副啮合刚度初值和切片齿轮副之间的载荷-变形协调方程,确定参与啮合的切片齿轮副编号。
30、在一个示例中,所述第三确定模块,包括:
31、第三确定子模块,用于根据所述各切片齿轮副啮合误差、所述参与啮合的切片齿轮副编号和切片齿轮副啮合刚度计算公式确定齿轮副综合啮合刚度。
32、在一个示例中,所述第三确定子模块,具体用于:
33、根据所述各切片齿轮副啮合误差、所述参与啮合的切片齿轮副编号和切片齿轮副啮合刚度计算公式确定各切片齿轮副啮合刚度;
34、根据所述各切片齿轮副啮合刚度确定所述齿轮副综合啮合刚度。
35、在一个示例中,所述输出模块,包括:
36、第四确定子模块,用于若所述齿轮副综合啮合刚度和所述齿轮副综合啮合刚度初值之间的关系满足预设条件,则确定所述齿轮副综合啮合刚度为所述齿轮副综合啮合目标刚度,确定所述动力学响应特征信息为所述齿轮副动态啮合力矩和所述轴承变形值;
37、第五确定子模块,用于若所述齿轮副综合啮合刚度和所述齿轮副综合啮合刚度初值之间的关系不满足预设条件,则将所述齿轮副综合啮合刚度作为齿轮副综合啮合刚度初值,将各切片齿轮副啮合刚度作为各切片齿轮副啮合刚度初值,返回执行根据齿轮副综合啮合刚度初值和齿轮传动系统动力学初始模型,确定齿轮副动态啮合力矩和轴承变形值,直至齿轮副综合啮合刚度和齿轮副综合啮合刚度初值之间的关系满足预设条件,输出齿轮副综合啮合目标刚度和动力学响应特征信息。
38、在一个示例中,所述齿轮传动系统动力学初始模型包括齿轮副动力学模型和轴承动力学模型。
39、在一个示例中,在所述根据所述齿轮副综合啮合刚度初值、各切片齿轮副啮合刚度初值和齿轮传动系统动力学初始模型,确定齿轮副动态啮合力矩和轴承变形值之前,所述装置还包括:
40、获取模块,用于获取预先配置的齿轮参数和工况参数;
41、第四确定模块,用于根据所述齿轮参数和所述工况参数确定所述齿轮副综合啮合刚度初值及各切片齿轮副啮合刚度初值。
42、本公开实施例的第三方面提供了一种电子设备,该电子设备包括:处理器和存储器,其中,所述存储器中存储有计算机程序,当所述计算机程序被所述处理器执行时,所述处理器执行上述第一方面的方法。
43、本公开实施例的第四方面提供了一种计算机可读存储介质,该存储介质中存储有计算机程序,当该计算机程序被处理器执行时,可以实现上述第一方面的方法。
44、本公开实施例提供了一种齿轮副综合啮合目标刚度确定方法及装置,该方法包括根据齿轮副综合啮合刚度初值和齿轮传动系统动力学初始模型,确定齿轮副动态啮合力矩和轴承变形值;根据各切片齿轮副啮合刚度初值、所述齿轮副动态啮合力矩和所述轴承变形值,确定参与啮合的切片齿轮副编号;根据所述参与啮合的切片齿轮副编号和切片齿轮副啮合刚度计算公式确定齿轮副综合啮合刚度;根据所述齿轮副综合啮合刚度和所述齿轮副综合啮合刚度初值之间的关系,输出齿轮副综合啮合目标刚度和动力学响应特征信息。采用本技术方案,能够准确地确定齿轮副综合啮合目标刚度,并提高齿轮传动系统动力学建模的精度。
- 还没有人留言评论。精彩留言会获得点赞!