基于视觉的玉米果穗表面图像矫正方法、系统及装置与流程
本发明涉及图像矫正,具体涉及一种基于视觉的玉米果穗表面图像矫正方法、系统及装置。
背景技术:
1、为充分了解果穗性状对产量的影响程度,明确各项指标对玉米产量的构成作用,玉米果穗的农艺性状是科研与日常生产中的常规测量项目,因此,获取玉米果穗表面图像具有重要的研究意义,传统玉米果穗表面图像矫正方法中通过单张玉米果穗表面图像进行分析矫正,存在性状指标精度差及稳定性差等问题,同时,传统玉米果穗表面图像矫正方法中通过多张玉米果穗表面图像进行矫正分析的过程中,由于特征相似,存在多张图片拼接困难的问题。
2、现有玉米果穗表面图像矫正方法的问题,直接导致分析玉米籽粒在玉米果穗的分布规律时出现分析指标有误的缺陷,难以为玉米质量指标的分析提供准确数据。
技术实现思路
1、本发明针对现有技术中的缺点,提出了一种基于视觉的玉米果穗表面图像矫正方法、系统及装置。
2、为了解决上述问题,本发明通过下述技术方案得以解决:
3、一种基于视觉的玉米果穗表面图像矫正方法,包括以下步骤:
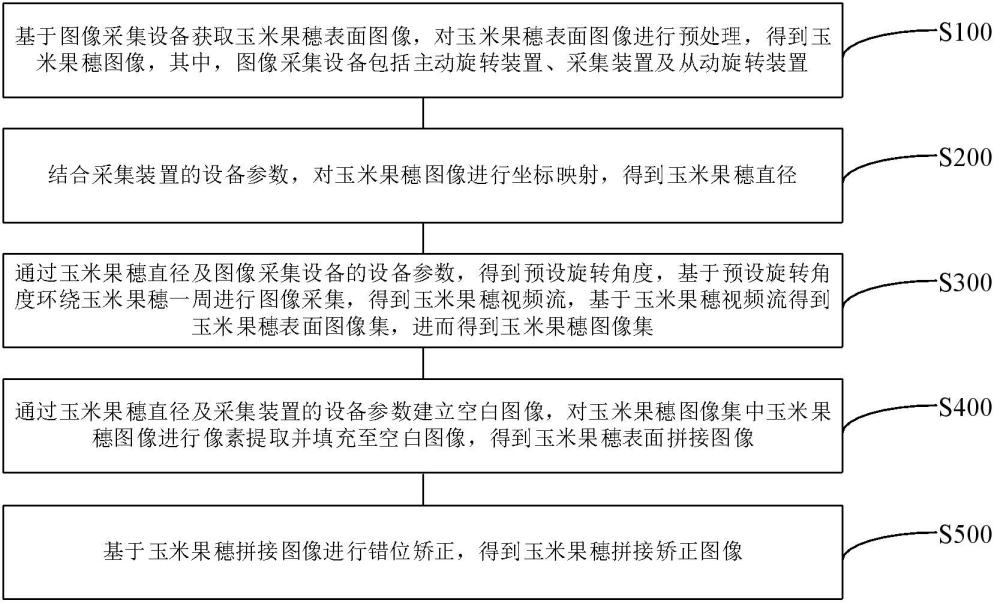
4、基于图像采集设备获取玉米果穗表面图像,对玉米果穗表面图像进行预处理,得到玉米果穗图像,其中,图像采集设备包括主动旋转装置、采集装置及从动旋转装置;
5、结合采集装置的设备参数,对玉米果穗图像进行坐标映射,得到玉米果穗直径;
6、通过玉米果穗直径及图像采集设备的设备参数,得到预设旋转角度,基于预设旋转角度环绕玉米果穗一周进行图像采集,得到玉米果穗视频流,基于玉米果穗视频流得到玉米果穗表面图像集,进而得到玉米果穗图像集;
7、通过玉米果穗直径及采集装置的设备参数建立空白图像,对玉米果穗图像集中玉米果穗图像进行像素提取并填充至空白图像,得到玉米果穗表面拼接图像;
8、基于玉米果穗拼接图像进行错位矫正,得到玉米果穗拼接矫正图像。
9、作为一种可实施方式,所述对玉米果穗表面图像进行预处理,得到玉米果穗图像,包括以下步骤:
10、对玉米果穗表面图像进行黑色通道分离,得到果穗黑色通道图像;
11、将玉米果穗表面图像与果穗黑色通道图像进行相减,得到玉米果穗图像,进而形成玉米果穗图像。
12、作为一种可实施方式,所述对玉米果穗图像进行坐标映射,包括以下步骤:
13、基于玉米果穗图像的坐标系与像素坐标系的一致性,建立图像像素坐标变换关系,表示如下:
14、
15、结合图像坐标系与相机坐标系的三维平移与旋转关系,建立图像相机坐标变换关系,表示如下:
16、
17、基于图像像素坐标变换关系及图像相机坐标变换关系,得到玉米果穗图像的坐标映射关系,表示如下:
18、
19、其中,表示采集装置中相机焦距,表示相机内参数矩阵,表示相机外参数矩阵,表示像素坐标系,表示像素在横轴的物理尺寸,表示像素在纵轴的物理尺寸,表示图像中心坐标与图像原点坐标之间的像素数差值,表示相机坐标系,表示世界坐标系,表示旋转矩阵,表示平移矩阵,表示相机内参,表示图像坐标点。
20、作为一种可实施方式,所述得到预设旋转角度,包括以下步骤:
21、基于采集装置的设备参数及从动旋转装置的设备参数,得到玉米果穗上平面与从动旋转装置的间距,表示如下:
22、
23、结合玉米果穗上平面与从动旋转装置的间距及从动旋转装置的设备参数,得到玉米果穗上平面与采集装置的间距,表示如下:
24、
25、通过玉米果穗上平面与采集装置的间距,结合采集设备的采样帧率,得到预设旋转角度,表示如下:
26、
27、其中,表示从动旋转装置中的滚筒半径,表示从动旋转装置中的滚筒间距,表示玉米果穗半径,表示玉米果穗上平面与从动旋转装置的间距,表示从动旋转装置中滚筒与采集装置中相机焦点的间距,表示玉米果穗上平面与采集装置的间距,表示主动旋转装置中步进电机皮带轮半径,表示采集装置中相机焦距,表示采集装置中相机采样帧率,表示预设旋转角度。
28、作为一种可实施方式,所述得到玉米果穗视频流,表示如下:
29、
30、其中,表示玉米果穗视频流的时长,表示玉米果穗半径,表示主动旋转装置中步进电机皮带轮半径,表示预设旋转角度。
31、作为一种可实施方式,所述通过玉米果穗直径及采集装置的设备参数建立空白图像,包括以下步骤:
32、所述空白图像的宽与玉米果穗图像的宽相等;
33、所述空白图像的高,表示如下:
34、
35、其中,表示空白图像的高,表示玉米果穗半径,表示玉米果穗上平面与采集装置的焦点间距。
36、作为一种可实施方式,所述得到玉米果穗表面拼接图像,包括以下步骤:
37、获取玉米果穗图像集中所有玉米果穗图像的中间一行像素点,得到果穗中间像素;
38、将果穗中间像素填充至所述空白图像,得到玉米果穗表面拼接图像。
39、作为一种可实施方式,所述基于玉米果穗拼接图像进行错位矫正,包括以下步骤:
40、基于所述玉米果穗表面拼接图像,获取所有行像素与上方相邻行像素之间的像素匹配度;
41、基于像素匹配度,得到最佳匹配位置,进而得到玉米果穗表面拼接图像中所有行像素相对于玉米果穗表面拼接图像第一行像素的滑移量;
42、根据滑移量,对玉米果穗表面拼接图像中所有行像素进行重新填充,得到玉米果穗表面矫正图像。
43、作为一种可实施方式,所述像素匹配度,表示如下:
44、
45、其中,表示像素匹配度,表示点的像素值,表示点的像素值,表示滑移量,表示图像坐标点。
46、一种基于视觉的玉米果穗表面图像矫正系统,包括图像预处理模块、直径计算模块、图像采集模块、图像拼接模块及图像矫正模块;
47、所述图像预处理模块,基于图像采集设备获取玉米果穗表面图像,对玉米果穗表面图像进行预处理,得到玉米果穗图像,其中,图像采集设备包括主动旋转装置、采集装置及从动旋转装置;
48、所述直径计算模块,结合采集装置的设备参数,对玉米果穗图像进行坐标映射,得到玉米果穗直径;
49、所述图像采集模块,通过玉米果穗直径及图像采集设备的设备参数,得到预设旋转角度,基于预设旋转角度环绕玉米果穗一周进行图像采集,得到玉米果穗视频流,基于玉米果穗视频流得到玉米果穗表面图像集,进而得到玉米果穗图像集;
50、所述图像拼接模块,通过玉米果穗直径及采集装置的设备参数建立空白图像,对玉米果穗图像集中玉米果穗图像进行像素提取并填充至空白图像,得到玉米果穗表面拼接图像;
51、所述图像矫正模块,基于玉米果穗拼接图像进行错位矫正,得到玉米果穗拼接矫正图像。
52、作为一种可实施方式,所述图像矫正模块,被设置为:
53、基于所述玉米果穗表面拼接图像,获取所有行像素与上方相邻行像素之间的像素匹配度;
54、基于像素匹配度,得到最佳匹配位置,进而得到玉米果穗表面拼接图像中所有行像素相对于玉米果穗表面拼接图像第一行像素的滑移量;
55、根据滑移量,对玉米果穗表面拼接图像中所有行像素进行重新填充,得到玉米果穗表面矫正图像;
56、其中,所述像素匹配度,表示如下:
57、
58、其中,表示像素匹配度,表示点的像素值,表示点的像素值,表示滑移量,表示图像坐标点。
59、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如下所述的方法:
60、基于图像采集设备获取玉米果穗表面图像,对玉米果穗表面图像进行预处理,得到玉米果穗图像,其中,图像采集设备包括主动旋转装置、采集装置及从动旋转装置;
61、结合采集装置的设备参数,对玉米果穗图像进行坐标映射,得到玉米果穗直径;
62、通过玉米果穗直径及图像采集设备的设备参数,得到预设旋转角度,基于预设旋转角度环绕玉米果穗一周进行图像采集,得到玉米果穗视频流,基于玉米果穗视频流得到玉米果穗表面图像集,进而得到玉米果穗图像集;
63、通过玉米果穗直径及采集装置的设备参数建立空白图像,对玉米果穗图像集中玉米果穗图像进行像素提取并填充至空白图像,得到玉米果穗表面拼接图像;
64、基于玉米果穗拼接图像进行错位矫正,得到玉米果穗拼接矫正图像。
65、一种基于视觉的玉米果穗表面图像矫正装置,包括存储器、处理器以及存储在所述存储器中并在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如下所述的方法:
66、基于图像采集设备获取玉米果穗表面图像,对玉米果穗表面图像进行预处理,得到玉米果穗图像,其中,图像采集设备包括主动旋转装置、采集装置及从动旋转装置;
67、结合采集装置的设备参数,对玉米果穗图像进行坐标映射,得到玉米果穗直径;
68、通过玉米果穗直径及图像采集设备的设备参数,得到预设旋转角度,基于预设旋转角度环绕玉米果穗一周进行图像采集,得到玉米果穗视频流,基于玉米果穗视频流得到玉米果穗表面图像集,进而得到玉米果穗图像集;
69、通过玉米果穗直径及采集装置的设备参数建立空白图像,对玉米果穗图像集中玉米果穗图像进行像素提取并填充至空白图像,得到玉米果穗表面拼接图像;
70、基于玉米果穗拼接图像进行错位矫正,得到玉米果穗拼接矫正图像。
71、本发明由于采用了以上的技术方案,具有显著的技术效果:
72、通过本发明的方法解决了基于单张玉米果穗表面图像进行矫正存在的性状精度差,稳定性差等问题,同时避免基于多张玉米果穗表面图像进行矫正方法中由于果穗表面特征相似存在的拼接融合困难的问题,通过矫正方法解决了拼接后图像产生错位的弊端,为玉米果穗的后续研究提供便利及重要支撑。
- 还没有人留言评论。精彩留言会获得点赞!