一种无稳定平台的机载线阵高光谱遥感影像几何处理方法
本发明涉及空天信息技术中高光谱影像处理应用领域,具体来说是一种无稳定平台的机载线阵高光谱遥感影像几何处理方法。
背景技术:
1、随着航空航天、光学和计算机科学领域的不断发展,高光谱遥感成像技术已经取得了长足的进步。高光谱图像hyperspectral image以其在连续窄波段上记录观测场景的光谱信号和反映观测场景中空间地物分布的特性,成为精确检测、识别和分析地表目标的有力工具。与传统遥感技术相比,高光谱图像以其更加精细的光谱分辨率和更广泛的光谱覆盖范围,能够捕获地物目标更加丰富的信息。高光谱图像的应用十分广泛,其中包括但不限于智能农业、环境监测和林业灾害分析等领域。此外,高光谱图像还可以用于矿产勘探、城市规划、海洋环境监测等领域,为其提供了高效、精准的数据分析手段。但是,现有高光谱成像系统的硬件限制,导致获取的高光谱图像通常有比较低的几何质量,这严重限制了其应用范围。因此,机载线阵高光谱影像几何处理具有重要意义。
2、现有研究中,未考虑到整个平台稳定精度对线阵高光谱影像几何较真产生的误差影响。因此,在影像数据获取阶段,需考虑到高光谱相机、pos以及平台之间的安装关系常态化标定。由于原始影像严重扭曲,几何校正间接法难以适用,可利用三角网对非均匀几何定位格网构建索引,从而实现几何校正。此外,pos数据中存在误差,导致影像随航向几何定位便宜,可利用平滑先验对原始数据进行去噪,将偏移量转为滚动角残差并补偿至原始pos数据,同时为保持校正影像几何分辨率,需对不规则网格插值方法进行改正。国内暂无对立体sar影像自动生成高精度控制点的论文与专利。
技术实现思路
1、本发明的目的是为了解决现有技术中无法对不稳定平台的机载线阵高光谱影像高精度几何处理问题,提供一种无稳定平台的机载线阵高光谱遥感影像几何处理方法来解决上述问题。
2、为了实现上述目的,本发明技术方案如下:
3、一种无稳定平台的机载线阵高光谱遥感影像几何处理方法,包括以下步骤:
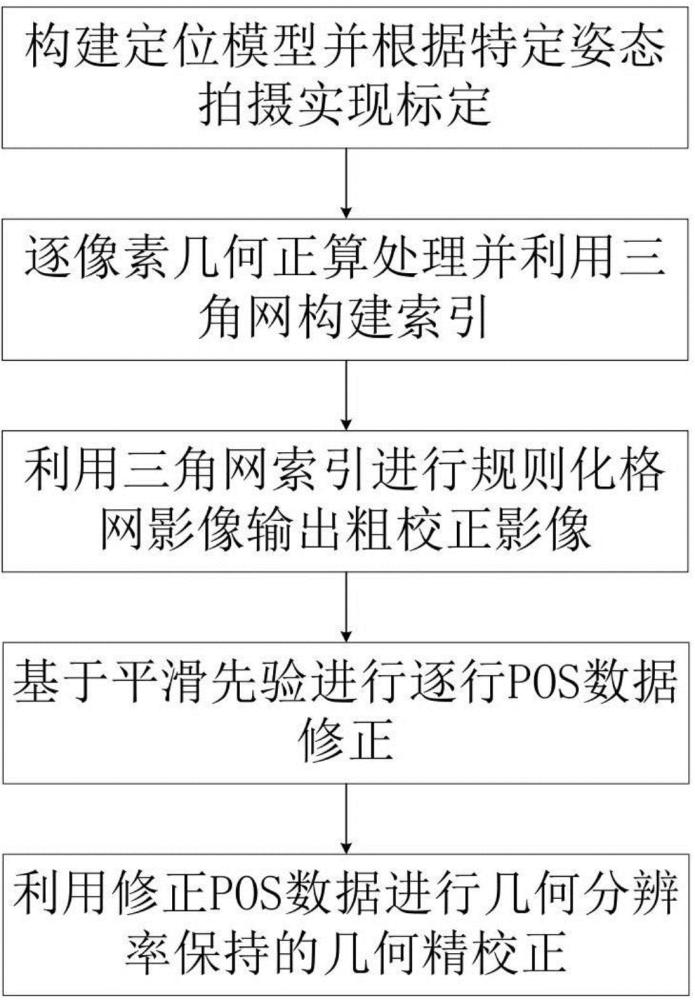
4、11)构建定位模型并根据特定姿态拍摄实现标定:读取初始位置和方位系统pos(position and orientation system,定位定向系统)数据和内外方位元素构建几何定位模型;按照偏航180度、相等俯仰角及相等横滚角对平坦区域拍摄,获取立体像对并解算物方点三维坐标;利用误差自反特性处理三维坐标得到虚拟控制点用以标定高光谱相机的安装矩阵误差;
5、12)逐像素几何正算处理并利用三角网构建索引:利用构建的几何定位模型逐像素进行几何正算处理至研究区平均高程面上,得到非均匀几何定位格网,并利用三角网对非均匀几何定位格网构建索引;
6、 13)利用三角网索引进行规则化格网影像输出粗校正影像:根据三角网构建的索引,由非均匀几何定位格网采样至规则格网,得到一张粗校正的影像;
7、 14)基于平滑先验进行逐行pos数据修正:对规则化输出的影像逐行进行匹配并计算偏移量;对偏移量进行一次平滑先验去噪;将偏移量转为滚动角残差并补偿至原始pos数据中得到修正的pos数据;
8、 15)利用修正pos数据进行几何分辨率保持的几何精校正:根据修正的pos数据构建几何定位模型,再进行几何精细校正,几何分辨率保持的不规则各网点插值完成单航带高光影像校正。
9、所述构建定位模型并根据特定姿态拍摄实现标定包括以下步骤:
10、 21)进行内外方位元素参数建模:逐行读取行时文件中的成像时间,读取姿、轨数据并根据成像时间内插出对应行成像时刻的姿态及轨道位置数据,其中和分别为俯仰、横滚以及偏航角,和分别为在wgs84坐标系系下x坐标、y坐标、z坐标、x速度、y速度以及z速度,姿态内插采取3阶多项式,轨道内插采用3阶拉格朗日内插;根据焦距和像元大小得到第列的ccd探元在相机中的指向<mstyle displaystyle="true" mathcolor="#000000"><mi>[</mi><mi>φ</mi><mi>,</mi><mi>ϕ</mi><mi>,</mi><mn>1</mn><msubsup><mi>]</mi><mi>x</mi><mi>t</mi></msubsup></mstyle>、相机在飞机载体初始安装矩阵、gps设备与飞机载体中心初始偏移值<mstyle displaystyle="true" mathcolor="#000000"><mi>[</mi><msub><mi>d</mi><mi>x</mi></msub><mi>,</mi><msub><mi>d</mi><mi>y</mi></msub><mi>,</mi><msub><mi>d</mi><mi>z</mi></msub><msubsup><mi>]</mi><mi>offset</mi><mi>t</mi></msubsup></mstyle>,构建几何定位模型如下:
11、<mstyle displaystyle="true" mathcolor="#000000"><mi>[</mi><mi>x</mi><mi>,</mi><mi>y</mi><mi>,</mi><mi>z</mi><msubsup><mi>]</mi><mrow><mi>(</mi><mi>x</mi><mi>,</mi><mi>y</mi><mi>)</mi></mrow><mi>t</mi></msubsup></mstyle>=(<mstyle displaystyle="true" mathcolor="#000000"><mi>[</mi><msub><mi>d</mi><mi>x</mi></msub><mi>,</mi><msub><mi>d</mi><mi>y</mi></msub><mi>,</mi><msub><mi>d</mi><mi>z</mi></msub><msubsup><mi>]</mi><mi>offset</mi><mi>t</mi></msubsup></mstyle>+<mstyle displaystyle="true" mathcolor="#000000"><mi>[</mi><mi>φ</mi><mi>,</mi><mi>ϕ</mi><mi>,</mi><mn>1</mn><msubsup><mi>]</mi><mi>x</mi><mi>t</mi></msubsup></mstyle>),
12、其中<mstyle displaystyle="true" mathcolor="#000000"><mi>[</mi><mi>x</mi><mi>,</mi><mi>y</mi><mi>,</mi><mi>z</mi><msubsup><mi>]</mi><mrow><mi>(</mi><mi>x</mi><mi>,</mi><mi>y</mi><mi>)</mi></mrow><mi>t</mi></msubsup></mstyle>为机载线阵高光谱影像上坐标对应的物方三维坐标,其中为影像列坐标,y为影像行坐标,为成像时刻对应的从导航坐标系到坐标系下的旋转矩阵,为成像时刻对应的从飞机载体坐标系到导航坐标系的旋转矩阵,为比例因子,上式完成从高光谱影像上坐标到物方坐标<mstyle displaystyle="true" mathcolor="#000000"><mi>[</mi><mi>x</mi><mi>,</mi><mi>y</mi><mi>,</mi><mi>z</mi><msubsup><mi>]</mi><mrow><mi>(</mi><mi>x</mi><mi>,</mi><mi>y</mi><mi>)</mi></mrow><mi>t</mi></msubsup></mstyle>的转换;
13、 22)对高程为的地形平坦区域,机载线阵高光谱相机按照偏航180°拍摄采集影像获取虚拟控制点,具体步骤为:
14、 221)对区域偏航180°、相等俯仰角及相等横滚角进行立体采集,并分别构建偏航0°的几何定位模型和偏航180°的几何定位模型;
15、 222)在区域内挑选5对同名点,在偏航0°影像上的像方坐标为,利用模型几何正算到物方得到三维坐标,;在偏航180°影像上的像方坐标为,利用几何正算到物方得到三维坐标,;
16、 223)对同名点的物方坐标进行平均处理得到5个虚拟控制点:
17、<mstyle displaystyle="true" mathcolor="#000000"><mi>(</mi><msub><mi>x</mi><mi>i</mi></msub><mi>,</mi><msub><mi>y</mi><mi>i</mi></msub><mi>,</mi><msub><mi>z</mi><mi>i</mi></msub><msub><mi>)</mi><mi>n</mi></msub><mi> =[</mi><mi>(</mi><msub><mi>x</mi><mi>i</mi></msub><mi>,</mi><msub><mi>y</mi><mi>i</mi></msub><mi>,</mi><msub><mi>z</mi><mi>i</mi></msub><msub><mi>)</mi><mrow><mi>yaw</mi><mi>=</mi><mn>0</mn><mi>,</mi><mi>n</mi></mrow></msub><mo>+</mo><mi>(</mi><msub><mi>x</mi><mi>i</mi></msub><mi>,</mi><msub><mi>y</mi><mi>i</mi></msub><mi>,</mi><msub><mi>z</mi><mi>i</mi></msub><msub><mi>)</mi><mrow><mi>yaw</mi><mi>=</mi><mn>180</mn><mi>,</mi><mi>n</mi></mrow></msub><mi>] /21</mi><mi>≤</mi><mi>n</mi><mi>≤</mi><mi>5</mi></mstyle>
18、 23)利用虚拟的控制点标定相机安装误差,得到相机安装误差补偿后的几何定位模型:
19、<mstyle displaystyle="true" mathcolor="#000000"><mi>[</mi><mi>x</mi><mi>,</mi><mi>y</mi><mi>,</mi><mi>z</mi><msubsup><mi>]</mi><mrow><mi>(</mi><mi>x</mi><mi>,</mi><mi>y</mi><mi>)</mi></mrow><mi>t</mi></msubsup></mstyle>=(<mstyle displaystyle="true" mathcolor="#000000"><mi>[</mi><msub><mi>d</mi><mi>x</mi></msub><mi>,</mi><msub><mi>d</mi><mi>y</mi></msub><mi>,</mi><msub><mi>d</mi><mi>z</mi></msub><msubsup><mi>]</mi><mi>offset</mi><mi>t</mi></msubsup></mstyle>+<mstyle displaystyle="true" mathcolor="#000000"><mi>[</mi><mi>φ</mi><mi>,</mi><mi>ϕ</mi><mi>,</mi><mn>1</mn><msubsup><mi>]</mi><mi>x</mi><mi>t</mi></msubsup></mstyle>)。
20、所述逐像素几何正算处理并利用三角网构建索引包括以下步骤:
21、 31)利用23)中的几何定位模型和全球30m的srtm dem的数据,将对测区拍摄的原始影像逐像点正算到地面得到物方坐标,进而得到不规则的格网点对;
22、 32)利用三角网格(triangle mesh)对不规则的格网点对生成三角网并构建索引,得到快速反算函数,从而实现给定物方平面坐标,快速索引到原始影像上的像点。
23、所述基于平滑先验进行逐行pos数据修正包括以下步骤:
24、 41)重采样一张与粗校正的影像左上角起始坐标差半个分辨单元,但分辨率和影像大小一致的影像,具体步骤为:
25、 411)粗校正的影像左上角坐标为起始,然后以该坐标加上粗校正影像的半个分辨率单元为待重采样的新的粗校正的影像的左上角坐标:
26、,上式中为粗校正的影像的x方向和y方向的分辨率;
27、 412)按照双线性卷积重采样出一张分辨率、影像大小和粗校正的影像一致的影像;
28、 42)对粗校正的影像和重采样后的粗校正的影像按照相位相关逐行匹配,得到每行的相对偏移量;
29、 43)中每行中间像素点,根据粗校正的影像中仿射6参数<mstyle displaystyle="true" mathcolor="#000000"><mi>,</mi><mi>affine</mi><mi>(</mi><mn>5</mn><msub><mi>)]</mi><mrow><mi>im</mi><msub><mi>age</mi><mi>coarse</mi></msub></mrow></msub></mstyle>可以得到影像上对应物方坐标:
30、,
31、进一步根据快速反算函数可以得到中每行中间像素点对应到原始影像上的像素点;
32、 44)进一步根据原始影像上的像素点坐标及21)原始影像的姿轨模型,内插出原始影像像素点坐标对应成像时刻的姿态和轨道位置数据,并利用轨道数据中的航高将粗校正的影像每行相对偏移量转为滚动角误差,其中为粗校正的影像的行分辨率;
33、 45)重复43)-44),从而得到原始影像上所有行的滚动角误差,根据平滑先验,每1000行按照3阶多项式平滑拟合,并利用随机抽样一致性进行误差剔除,从而得到修正后的姿态数据。
34、所述利用修正pos数据进行几何分辨率保持的几何精校正包括以下步骤:
35、 51)利用步骤45)修正后姿态数据以及步骤23)标定出的标定相机安装误差,重新构建精化的机载线阵高光谱遥感影像定位模型;
36、 52)根据重新构建精化的机载线阵高光谱遥感影像定位模型,逐像素对原始影像几何正算到像方,并利用三角网构建物方不规则格网点索引,进一步根据三角网索引进行规则化重采样输出,其中几何分辨率保持的重采样具体步骤如下:
37、 521)逐波段,逐像素根据三角网索引分辨按照0.6倍、0.9倍、1.2倍分辨率规则化输出校正影像,形成分辨率空间格网;
38、 522)对0.6倍、0.9倍、1.2倍分辨率规则化输出校正影像按照tri-cupic进行差值得到最终校正的1倍分辨率的影像,其中tri-cupic公式为,其中为像素点坐标,为分辨率空间格网,和为次数,为插值系数。
39、有益效果
40、本发明涉及一种无稳定平台的机载线阵高光谱遥感影像几何处理方法,与现有技术相比通过偏航180度、相等俯仰角及相等横滚角对平坦区域拍摄方案,解决了在无需在外场布设控制点的情形下,实现无控标定定高光谱相机的安装矩阵误差;并通过构建三角网索引,实现服物方空间非均匀规则格网快速构建。此外,针对pos数据中定位误差便宜两,利用利用平滑进行修正,使得外方位元素数据质量得到提升。最后,利用几何分辨率保持的采样方法,使得校正后影像具有较好的几何分辨率。
- 还没有人留言评论。精彩留言会获得点赞!