一种中尺度涡旋识别和轨迹追踪方法及其装置与流程
本发明属于涡旋识别和轨迹追踪,具体而言,涉及一种中尺度涡旋识别和轨迹追踪方法及其装置。
背景技术:
1、海洋中尺度涡根据其流场旋转方向的不同,可以分为反气旋涡(anticycloniceddy)和气旋涡(cyclonic eddy)。在北半球,反气旋涡顺时针旋转,气旋涡逆时针旋转;而南半球则相反,反气旋涡逆时针旋转,气旋涡顺时针旋转。
2、现有技术仅基于单一遥感数据开展中尺度涡旋识别,没有考虑多源数据结合的海洋中尺度涡识别。单一遥感数据进行中尺度涡旋识别存在遗漏识别、错误识别和识别不准确等问题。尤其是中尺度涡旋识别常用的海面高度数据,其是由多颗沿轨测高卫星数据通过一段时间融合插值得到,对中尺度涡旋平滑比较严重,并且一些涡旋如果恰好在两条星下点轨道间隙内,很可能会出现中尺度涡旋的遗漏识别。另外,海面温度数据源其空间分辨率更高,可达公里量级,但其仅限于捕获强流区域涡旋活动较强的中尺度涡旋,这些中尺度涡旋在海表面可以引起较明显的海面温度变化。但对于涡旋活动较弱的中尺度涡,其对海面温度的改变较小,海面温度的高日变化以及其他海洋小尺度活动覆盖这些中尺度涡旋活动引起的温度变化,从而导致这些涡旋在海面温度数据较难观测到。
技术实现思路
1、本发明实施例提供了一种中尺度涡旋识别和轨迹追踪方法及其装置,其目的在于解决现有的识别和轨迹追踪方法单一遥感图像进行中尺度涡旋识别存在遗漏识别、错误识别和识别不准确的问题。
2、鉴于上述问题,本发明提出的技术方案是:
3、第一方面,一种中尺度涡旋识别和轨迹追踪方法,所述方法包括:
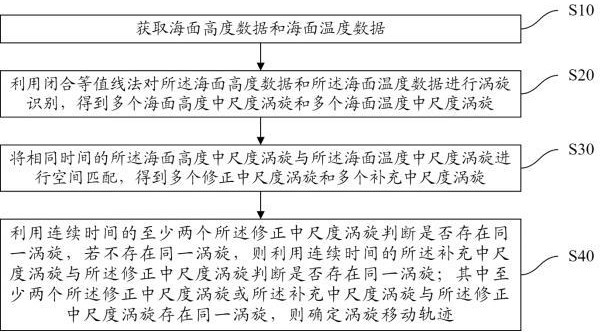
4、获取海面高度数据和海面温度数据;
5、利用闭合等值线法对所述海面高度数据和所述海面温度数据进行涡旋识别,得到多个海面高度中尺度涡旋和多个海面温度中尺度涡旋;
6、将相同时间的所述海面高度中尺度涡旋与所述海面温度中尺度涡旋进行空间匹配,得到多个修正中尺度涡旋和多个补充中尺度涡旋;
7、该步骤包括:
8、计算相同时间的所述海面高度中尺度涡旋与所述海面温度中尺度涡旋的第一空间重合率;
9、判断所述第一空间重合率大否大于或等于第一预设阈值;
10、若所述第一空间重合率大于或等于第一预设阈值,则利用所述海面温度中尺度涡旋对所述海面高度中尺度涡旋进行修正,得到修正中尺度涡旋;
11、若所述第一空间重合率小于第二预设阈值时,则将所述海面高度中尺度涡旋作为所述修正中尺度涡旋、所述海面温度中尺度涡旋作为补充中尺度涡旋;
12、利用连续时间的至少两个所述修正中尺度涡旋判断是否存在同一涡旋,若不存在同一涡旋,则利用连续时间的所述补充中尺度涡旋与所述修正中尺度涡旋判断是否存在同一涡旋;其中至少两个所述修正中尺度涡旋或所述补充中尺度涡旋与所述修正中尺度涡旋存在同一涡旋,则确定涡旋移动轨迹。
13、进一步地,所述第一空间重合率的计算公式如下:
14、;
15、式中:表示第一空间重合率;
16、表示海面高度中尺度涡旋;
17、表示海面温度中尺度涡旋;
18、表示海面高度中尺度涡旋与海面温度中尺度涡旋的重叠区域;
19、表示海面高度中尺度涡旋与海面温度中尺度涡旋的并集区域。
20、进一步地,所述若所述第一空间重合率大于或等于第一预设阈值,则利用所述海面温度中尺度涡旋对所述海面高度中尺度涡旋进行修正,得到修正中尺度涡旋,包括:
21、将所述海面高度中尺度涡旋的中心参数和边界参数替换为所述海面温度中尺度涡旋的中心参数和边界参数,其余参数保持不变。
22、进一步地,所述判断所述第一空间重合率大否大于或等于第一预设阈值包括:
23、若所述第一空间重合率小于所述第一预设阈值,且,所述第一空间重合率大于或等于所述第二预设阈值,则将所述海面高度中尺度涡旋作为所述修正中尺度涡旋,并且舍弃所述海面温度中尺度涡旋。
24、进一步地,所述利用连续时间的至少两个所述修正中尺度涡旋判断是否存在同一涡旋,若不存在同一涡旋,则利用所述补充中尺度涡旋与所述修正中尺度涡旋判断是否存在同一涡旋;其中至少两个所述修正中尺度涡旋或所述补充中尺度涡旋与所述修正中尺度涡旋存在同一涡旋,则确定涡旋移动轨迹,包括:
25、根据第一修正中尺度涡旋以两倍半径为空间范围搜寻对应的第二修正中尺度涡旋;其中所述第一修正中尺度涡旋为第一时间的所述修正中尺度涡旋,所述第二修正中尺度涡旋为第二时间的所述修正中尺度涡旋;
26、计算第一修正中尺度涡旋与多个第二修正中尺度涡旋的涡旋属性变化率;
27、判断所述涡旋属性变化率是否小于第三预设阈值;
28、若所述涡旋属性变化率小于所述第三预设阈值,确定所述涡旋属性变化率最小的所述第二修正中尺度涡旋与所述第一修正中尺度涡旋为同一涡旋,同时确定所述涡旋移动轨迹。
29、进一步地,所述判断所述涡旋属性变化率是否小于第三预设阈值之后,进一步包括:
30、若所述涡旋属性变化率大于所述第三预设阈值,则计算所述第一修正中尺度涡旋与多个所述第二修正中尺度涡旋的第二空间重叠率;
31、判断所述第二空间重叠率是否大于涡旋重叠率临界阈值;
32、若所述第二空间重叠率大于所述涡旋重叠率临界阈值,则确定所述第二空间重叠率大于所述涡旋重叠率临界阈值的所述第二修正中尺度涡旋与所述第一修正中尺度涡旋为同一涡旋,同时确定所述涡旋移动轨迹。
33、进一步地,所述判断所述第二空间重叠率是否大于涡旋重叠率临界阈值之后,进一步包括:
34、若所述第二空间重叠率小于所述涡旋重叠率临界阈值,根据所述第一修正中尺度涡旋以两倍半径为空间范围搜寻第二时间的所述补充中尺度涡旋;
35、计算所述第一修正中尺度涡旋与第二时间的所述补充中尺度涡旋的所述第二空间重叠率;
36、判断所述第二空间重叠率是否大于所述涡旋重叠率临界阈值;
37、若所述第二空间重叠率大于所述涡旋重叠率临界阈值,则确定所述第二空间重叠率大于所述涡旋重叠率临界阈值的第二时间的所述补充中尺度涡旋与所述第一修正中尺度涡旋为同一涡旋,同时确定所述涡旋移动轨迹;
38、若所述第二空间重叠率小于所述涡旋重叠率临界阈值,则在预设延长时间范围内继续搜寻,直至未搜寻到第二时间的所述补充中尺度涡旋与所述第一修正中尺度涡旋的同一涡旋。
39、进一步地,所述涡旋属性变化率的计算公式如下:
40、;
41、式中: d表示涡旋属性变化率;
42、表示第一修正中尺度涡旋;
43、表示第二修正中尺度涡旋;
44、表示第一修正中尺度涡旋与第二修正中尺度涡旋的半径的变化,;
45、表示第一修正中尺度涡旋的半径;
46、表示第二修正中尺度涡旋的半径;
47、表示第一修正中尺度涡旋与第二修正中尺度涡旋的振幅的变化,;
48、表示第一修正中尺度涡旋的振幅;
49、表示第二修正中尺度涡旋的振幅。
50、进一步地,所述第二空间重叠率的计算公式如下:
51、;
52、式中:表示第二空间重叠率;
53、表示第一修正中尺度涡旋与第二修正中尺度涡旋的重叠区域;
54、表示第一修正中尺度涡旋和第二修正中尺度涡旋中较小的空间范围。
55、第二方面,一种中尺度涡旋识别和轨迹追踪装置,所述装置包括:
56、获取模块,所述获取模块被配置为获取海面高度数据和海面温度数据;
57、识别模块,所述识别模块被配置为利用闭合等值线法对所述海面高度数据和所述海面温度数据进行涡旋识别,得到多个海面高度中尺度涡旋和多个海面温度中尺度涡旋;
58、时空匹配模块,所述时空匹配模块被配置为将相同时间的所述海面高度中尺度涡旋与所述海面温度中尺度涡旋进行空间匹配,得到多个修正中尺度涡旋和多个补充中尺度涡旋;
59、该模块包括:
60、计算相同时间的所述海面高度中尺度涡旋与所述海面温度中尺度涡旋的第一空间重合率;
61、判断所述第一空间重合率大否大于或等于第一预设阈值;
62、若所述第一空间重合率大于或等于第一预设阈值,则利用所述海面温度中尺度涡旋对所述海面高度中尺度涡旋进行修正,得到修正中尺度涡旋;
63、若所述第一空间重合率小于第二预设阈值,则将所述海面高度中尺度涡旋作为所述修正中尺度涡旋、所述海面温度中尺度涡旋作为补充中尺度涡旋;
64、轨迹追踪模块,所述轨迹追踪模块被配置为利用连续时间的至少两个所述修正中尺度涡旋判断是否存在同一涡旋,若不存在同一涡旋,则利用连续时间的所述补充中尺度涡旋与所述修正中尺度涡旋判断是否存在同一涡旋;其中至少两个所述修正中尺度涡旋或所述补充中尺度涡旋与所述修正中尺度涡旋存在同一涡旋,则确定涡旋移动轨迹。
65、本发明实施例提供的上述技术方案的有益效果至少包括:
66、(1)通过将海面高度数据和海面温度数据进行结合,充分发挥两种遥感数据对海洋中尺度涡旋的观测能力,开展海洋中尺度涡旋观测识别。并且通过海面温度中尺度涡旋对海面高度中尺度涡旋进行改进,提高中尺度涡旋的观测精度。
67、(2)基于海面温度数据开展中尺度涡旋识别,对海面高度中尺度涡旋进行修正,一方面得到修正中尺度涡旋,另一方面得到补充中尺度涡旋,作为修正中尺度涡旋的补充涡旋,尽量弥补多源卫星测高融合数据对中尺度涡旋的遗漏观测。
68、(3)在涡旋轨迹追踪中,以修正中尺度涡旋为基准,通过涡旋属性相似方法和涡旋的空间拓扑关系,开展涡轨迹追踪。在修正中尺度涡旋没有查找到同一涡旋,那么会继续在补充中尺度涡旋中继续查找对应的同一涡旋,最终确定一个中尺度涡旋完整生命周期的移动轨迹。因此通过结合海面高度数据和海面温度的中尺度涡旋开展涡轨迹追踪,可以更加准确获取中尺度涡旋的移动轨迹、生命周期等运动信息。
69、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
- 还没有人留言评论。精彩留言会获得点赞!