基于人工智能的皮划艇技术动作预测方法及系统
本发明属于数据处理,具体是基于人工智能的皮划艇技术动作预测方法及系统。
背景技术:
1、皮划艇技术动作预测是一种利用数据分析和机器学习技术,对皮划艇运动员的动作进行预测的方法,通过建立模型和算法,对未来动作进行预测和模拟,提升运动员的技术水平和训练效果,旨在帮助皮划艇运动员优化训练计划、改进技术动作,并提供实时反馈。但是现有的皮划艇技术动作预测存在皮划艇运动员动作描述不准确,难以及时纠正动作缺陷的技术问题;存在误判皮划艇技术动作数据,导致错误的训练指导,影响技术动作的准确性和技术水平的提升的技术问题;存在技术动作的预测不准确,会导致运动员在关键技术方面得不到有效的训练,影响运动员的技术水平提高的技术问题。
技术实现思路
1、针对上述情况,为克服现有技术的缺陷,本发明提供了基于人工智能的皮划艇技术动作预测方法及系统,针对存在皮划艇运动员动作描述不准确,难以及时纠正动作缺陷的技术问题,采用采集定位数据,安装压力传感器并进行惯性测量,通过窗口化处理和数据分割,实时采集皮划艇运动员的技术动作数据;针对存在误判皮划艇技术动作数据,导致错误的训练指导,影响技术动作的准确性和技术水平的提升的技术问题,采用将样本数据进行二元分类,分为正常数据和异常数据,通过最小化正则项函数求得最优的权重向量,设置约束条件,使用拉格朗日乘数法求解得到分类问题的优化函数;针对存在技术动作的预测不准确,会导致运动员在关键技术方面得不到有效的训练,影响运动员的技术水平提高的技术问题,采用均值模糊聚类算法将数据分为训练集和测试集,引导重采样从训练集中提取样本,生成决策树并设置终止条件,计算非零叶子节点的权重,并计算决策树的权重,建立技术动作预测模型,得到最终的技术动作预测结果。
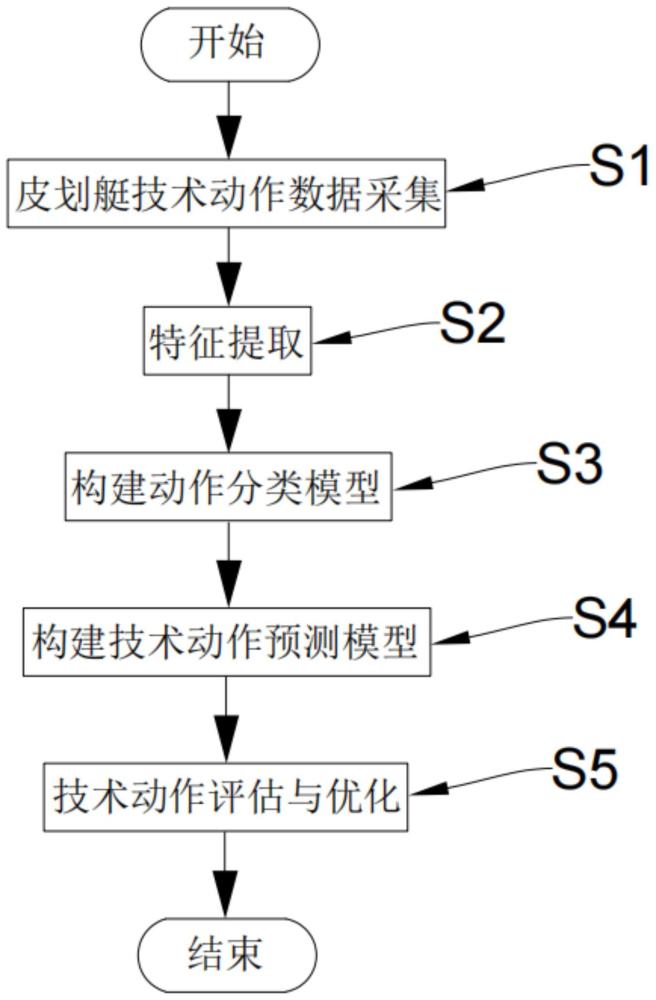
2、本发明采取的技术方案如下:本发明提供的基于人工智能的皮划艇技术动作预测方法,该方法包括以下步骤:
3、步骤s1:皮划艇技术动作数据采集,采集定位数据,安装压力传感器并进行惯性测量,通过窗口化处理和数据分割,实时采集皮划艇运动员的技术动作数据;
4、步骤s2:特征提取,将预处理后的技术动作数据进行特征选择,得到样本数据;
5、步骤s3:构建动作分类模型,将样本数据进行二元分类,分为正常数据和异常数据,通过最小化正则项函数求得最优的权重向量,设置约束条件,使用拉格朗日乘数法求解得到分类问题的优化函数;
6、步骤s4:构建技术动作预测模型,使用均值模糊聚类算法将数据分为训练集和测试集,引导重采样从训练集中提取样本,生成决策树并设置终止条件,对数据进行归一化处理,计算非零叶子节点的权重,并计算决策树的权重,建立技术动作预测模型,得到最终的技术动作预测结果;
7、步骤s5:技术动作评估与优化,定义动作评估指标,并定制优化策略。
8、进一步地,在步骤s1中,所述皮划艇技术动作数据采集,包括以下步骤:
9、步骤s11:采集定位数据,使用gps设备记录皮划艇的位置和速度信息;
10、步骤s12:安装压力传感器,在皮划艇的座椅和桨在接触到水面的位置安装压力传感器,测量运动员对桨杆施加的力度和角度;
11、步骤s13:惯性测量,集成加速度计、陀螺仪和磁强计的传感器系统,测量皮划艇运动员的姿态、加速度和旋转速度;
12、步骤s14:技术动作捕捉,为了实时采集皮划艇运动员的技术动作数据,对动作捕捉数据进行窗口化处理,将数据分割成指定长度的短序列,为了增强描述动作的能力,相邻窗口之间有50%的重叠,所述窗口的长度不能过短,否则包含的技术动作数据较少,识别效果差;窗口的长度不能过长,否则会导致系统延迟。
13、进一步地,在步骤s2中,所述特征提取,包括以下步骤:
14、步骤s21:数据预处理,对采集到的皮划艇运动员的技术动作数据进行去噪、归一化;
15、步骤s22:特征选择,从预处理后的技术动作数据进行特征选择,评估特征与目标动作之间的相关性,将经过数据预处理、特征选择的技术动作数据作为样本数据。
16、进一步地,在步骤s3中,所述构建动作分类模型,包括以下步骤:
17、步骤s31:划分样本数据,根据监督学习对数据进行二元分类,决策边界定义为样本数据执行求解的最大边际超平面,计算最佳超平面,使样本数据正确的分为两类,所用公式如下:
18、;
19、式中,g(x)表示分类函数,用于判断输入样本x所属的类别,w表示超平面的法向量,b是超平面的偏置项,x表示输入样本的特征向量,用于描述动作的特征,包括动作的加速度、角速度,wt表示w的转置;
20、步骤s32:将样本数据分为正常状态和异常状态,正常状态表示技术动作表现良好,符合规范和要求;异常状态表示技术动作存在缺陷,有助于教练和技术人员对技术动作数据进行分析,计算分类依据,所用公式如下:
21、;
22、式中,y表示样本数据的标签,即样本的真实分类,正常状态,标签y为1,异常状态,标签y为-1;
23、步骤s33:为了达到最大的分类效果,求解优化约束问题,所用公式如下:
24、;
25、;
26、式中,ω表示权重向量,表示正则化项函数,通过降低权重向量的大小,降低分类函数的复杂度,防止过拟合现象出现,m是一个常数,用来约束权重向量的长度,限制在一个合理范围内,通过调整m的数值,对权重向量的大小进行限制,求得最优的权重向量;
27、步骤s34:定义约束条件,用来确保决策边界的分类正确性,限制每个样本的预测分类结果与真实结果之间的关系,所用公式如下:
28、;
29、步骤s35:使用拉格朗日乘数求解,得到分类问题的优化函数,所用公式如下:
30、;
31、式中,f(x)是优化函数,sgn表示符号函数,α表示拉格朗日函数的乘数,用于对约束条件进行建模和优化。
32、进一步地,在步骤s4中,所述构建技术动作预测模型,包括以下步骤:
33、步骤s41:使用均值模糊聚类算法对数据进行处理,将数据分为训练集和测试集两部分,通过引导重采样从训练集中提取样本大小,每个训练集生成成对的决策树,决策树生成中,从每个分裂节点的维度属性特征中提取m1维度属性特征,遍历这些属性及其对应的值,计算最小均方值,得到最优分割标准,训练每棵决策树,直到达到终止条件;
34、步骤s42:经过归一化处理,计算每个非零叶子节点的权重,所用公式如下:
35、;
36、式中,mx表示非零叶子节点的权重,x表示样本的索引,t(x∈l(θ))表示样本x属于当前叶子节点的个数,l(θ)表示当前的叶子节点,s表示总样本的个数;
37、步骤s43:得到叶子节点的权重后,计算决策树的权重,所用公式如下:
38、;
39、式中,mn表示第n棵决策树的权重,l表示叶子节点的索引,ml表示每个叶子节点的权重,jl表示每个叶子节点的预测结果,l1表示叶子节点的总数,表示所有叶子节点权重的累加和,表示所有样本的权重的累加和;
40、步骤s44:保存决策树的根、节点和权重,建立技术动作预测模型,每棵决策树都被培育出来,培育过程中的分裂准则就像模型一样,获得每棵树的预测结果后,利用测试集生成的权重数据,使用加权平均来得到最终的预测,所用公式如下:
41、;
42、式中,j表示最终的预测结果,z表示决策树的总数,jn表示第n棵决策树的预测结果。
43、进一步地,在步骤s5中,所述技术动作评估与优化,包括以下步骤:
44、步骤s51:定义动作评估指标,根据皮划艇技术要求和目标,所述目标包括动作的稳定性、速度、准确性和力度,量化评价技术动作的质量和优劣;
45、步骤s52:优化策略定制,针对评估指标中的不足之处进行针对性训练和调整,通过教练、专家的指导,实时反馈,帮助皮划艇运动员纠正动作的缺陷,提高技术水平和竞技实力。
46、本发明提供的基于人工智能的皮划艇技术动作预测系统,包括皮划艇技术动作数据采集模块、特征提取模块、构建动作分类模型模块、构建技术动作预测模型模块和技术动作评估与优化模块;
47、所述皮划艇技术动作数据采集模块,具体为采集定位数据,安装压力传感器并进行惯性测量,通过窗口化处理和数据分割,实时采集皮划艇运动员的技术动作数据;
48、所述特征提取模块,具体为将预处理后的技术动作数据进行特征选择,得到样本数据;
49、所述构建动作分类模型模块,具体为将样本数据进行二元分类,通过最小化正则项函数求得最优的权重向量,设置约束条件,使用拉格朗日乘数法求解得到分类问题的优化函数;
50、所述构建技术动作预测模型模块,具体为使用均值模糊聚类算法将数据分为训练集和测试集,引导重采样从训练集中提取样本,生成决策树并设置终止条件,对数据进行归一化处理,计算非零叶子节点的权重,并计算决策树的权重,建立技术动作预测模型,得到最终的预测结果;
51、所述技术动作评估与优化模块,具体为定义动作评估指标,并定制优化策略。
52、采用上述方案本发明取得的有益成果如下:
53、(1)针对存在皮划艇运动员动作描述不准确,难以及时纠正动作缺陷的技术问题,采用采集定位数据,安装压力传感器并进行惯性测量,通过窗口化处理和数据分割,实时采集皮划艇运动员的技术动作数据;
54、(2)针对存在误判皮划艇技术动作数据,导致错误的训练指导,影响技术动作的准确性和技术水平的提升的技术问题,采用将样本数据进行二元分类,分为正常数据和异常数据,通过最小化正则项函数求得最优的权重向量,设置约束条件,使用拉格朗日乘数法求解得到分类问题的优化函数;
55、(3)针对存在技术动作的预测不准确,会导致运动员在关键技术方面得不到有效的训练,影响运动员的技术水平提高的技术问题,采用均值模糊聚类算法将数据分为训练集和测试集,引导重采样从训练集中提取样本,生成决策树并设置终止条件,对数据进行归一化处理,计算非零叶子节点的权重,并计算决策树的权重,建立技术动作预测模型,得到最终的技术动作预测结果。
- 还没有人留言评论。精彩留言会获得点赞!