基于遥感影像的道路要素提取方法、装置及设备与流程
本技术涉及电子地图,尤其涉及一种基于遥感影像的道路要素提取方法、装置及设备。
背景技术:
1、电子地图(electronic map),即数字地图,是利用计算机技术,以数字方式存储和查阅的地图。
2、电子地图在生产过程中,需要采集道路要素等地图数据进行电子地图的制作。相关技术对于道路要素等地图数据的采集方式,主要利用车辆采集、步行采集等进行实地采集,其中车辆采集虽然在一定程度上能保证数据采集的有效性和精度,但是需要在车辆上安装较为昂贵的采集设备(例如激光雷达、摄像头、惯性测量单元和定位设备等),且需要对不同采集设备的数据进行融合;而步行采集的采集效率低,且需要耗费大量人力成本;此外,通过上述方式实地采集地图数据后,通常是直接利用网络模型对地图数据进行训练,提取出相关道路要素数据,其训练难度大、精度低。
技术实现思路
1、本技术提供一种,基于遥感影像的道路要素提取方法、装置及设备,以至少解决上述技术问题之一。
2、根据本技术的第一方面,提供一种基于遥感影像的道路要素提取方法,包括:
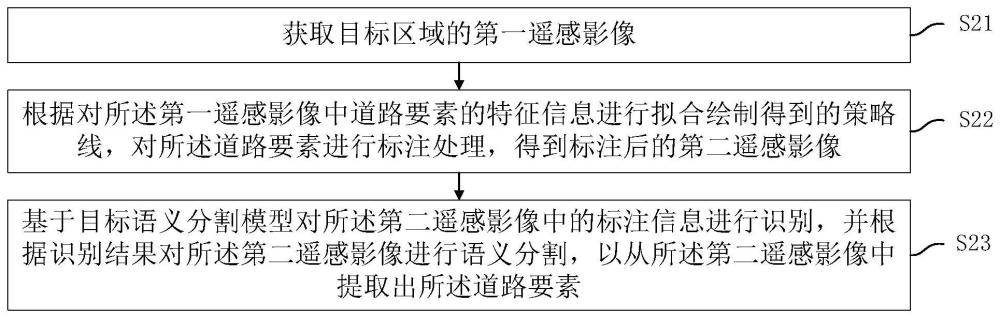
3、获取目标区域的第一遥感影像;
4、根据对所述第一遥感影像中道路要素的特征信息进行拟合绘制得到的策略线,对所述道路要素进行标注处理,得到标注后的第二遥感影像;
5、基于目标语义分割模型对所述第二遥感影像中的标注信息进行识别,并根据识别结果对所述第二遥感影像进行语义分割,以从所述第二遥感影像中提取出所述道路要素;其中,所述目标语义分割模型是基于带有预设标注信息的遥感图像训练得到。
6、在一种实施方式中,所述方法还包括:
7、基于预置的策略线绘制工具,拟合绘制所述第一遥感影像中的所述道路要素的特征信息,以得到关于所述道路要素对应的所述策略线;其中,所述特征信息包括所述道路要素的形状和/或方向。
8、在一种实施方式中,所述方法还包括:
9、沿所述第二遥感影像的横向,和/或纵向依次对所述第二遥感影像进行滑窗切割,得到每次滑窗切割后各自对应的第二遥感影像;
10、所述根据识别结果对所述第二遥感影像进行语义分割,以从所述第二遥感影像中提取出所述道路要素,包括:
11、根据所述识别结果,对每次滑窗切割后各自对应的第二遥感影像分别进行语义分割,并分别得到各个滑窗预测结果,以基于各个所述滑窗预测结果提取出所述道路要素。
12、在一种实施方式中,所述方法还包括:
13、确定每次滑窗切割的切割区域,所述切割区域包括前一滑窗切割区域和后一切割区域之间的重叠区域;
14、所述沿所述第二遥感影像的横向,和/或纵向依次对所述第二遥感影像进行滑窗切割,包括:
15、基于所述切割区域,沿所述第二遥感影像的横向,和/或纵向依次对所述第二遥感影像进行滑窗切割,使得滑窗切割后对应的第二遥感影像中包含所述重叠区域,所述重叠区域用于填补前一滑窗切割区域与后一滑窗切割区域的切割空缺。
16、在一种实施方式中,所述道路要素包括如下要素类型中的至少一个:道路实线、道路虚线和道路停止线;所述方法还包括:
17、基于所述道路要素的要素类型,从预训练的多个语义分割模型中选择确定出对应的目标语义分割模型;其中,每个所述语义分割模型,是各自基于对应要素类型的正样本数据和负样本数据训练得到。
18、在一种实施方式中,在得到标注后的第二遥感影像,以及基于目标语义分割模型对所述第二遥感影像进行语义分割之前,还包括:
19、基于预设像素值的像素对所述第二遥感影像中的标注位置进行膨胀处理,以基于所述目标语义分割模型对经过膨胀处理的所述第二遥感影像进行语义分割。
20、在一种实施方式中,所述方法还包括:
21、将提取的所述道路要素转化为矢量化信息;
22、将所述矢量化信息叠加至所述第一遥感影像中,并对叠加有所述矢量化信息的所述第一遥感影像进行可视化展示。
23、在一种实施方式中,在从所述第二遥感影像中提取出所述道路要素之后,还包括:
24、提取所述道路要素的骨架信息,得到骨架提取图像;
25、所述将提取的所述道路要素转化为矢量化信息,包括:遍历当前骨架提取图像中的每个像素点,基于所述第一遥感影像或者所述第二遥感影像的经纬度坐标信息,将每个所述像素点映射为对应的经纬度坐标,以得到所述道路要素对应的经纬度坐标。
26、根据本技术的第二方面,提供一种基于遥感影像的道路要素提取装置,包括:
27、图像获取模块,其设置为获取目标区域的第一遥感影像;
28、标注处理模块,其设置为根据对所述第一遥感影像中道路要素的特征信息进行拟合绘制得到的策略线,对所述道路要素进行标注处理,得到标注后的第二遥感影像;
29、要素提取模块,其设置为基于目标语义分割模型对所述第二遥感影像中的标注信息进行识别,并根据识别结果对所述第二遥感影像进行语义分割,以从所述第二遥感影像中提取出所述道路要素;其中,所述目标语义分割模型是基于带有预设标注信息的遥感图像训练得到。
30、在一种实施方式中,还包括:绘制模块,其设置为基于预置的策略线绘制工具,拟合绘制所述第一遥感影像中的所述道路要素的特征信息,以得到关于所述道路要素对应的所述策略线;其中,所述特征信息包括所述道路要素的形状和/或方向。
31、在一种实施方式中,所述装置还包括:
32、切割处理模块,其设置为沿所述第二遥感影像的横向,和/或纵向依次对所述第二遥感影像进行滑窗切割,得到每次滑窗切割后各自对应的第二遥感影像;
33、所述要素提取模块,包括:
34、滑窗预测单元,其设置为根据所述识别结果,对每次滑窗切割后各自对应的第二遥感影像分别进行语义分割,并分别得到各个滑窗预测结果,以基于各个所述滑窗预测结果提取出所述道路要素。
35、在一种实施方式中,所述装置还包括:
36、区域确定模块,其设置为确定每次滑窗切割的切割区域,所述切割区域包括前一滑窗切割区域和后一切割区域之间的重叠区域;
37、所述切割处理模块,具体设置为基于所述切割区域,沿所述第二遥感影像的横向,和/或纵向依次对所述第二遥感影像进行滑窗切割,使得滑窗切割后对应的第二遥感影像中包含所述重叠区域,所述重叠区域用于填补前一滑窗切割区域与后一滑窗切割区域的切割空缺。
38、在一种实施方式中,所述道路要素包括如下要素类型中的至少一个:道路实线、道路虚线和道路停止线;所述装置还包括:
39、模型选择模块,其设置为基于所述道路要素的要素类型,从预训练的多个语义分割模型中选择确定出对应的目标语义分割模型;其中,每个所述语义分割模型,是各自基于对应要素类型的正样本数据和负样本数据训练得到。
40、在一种实施方式中,所述装置还包括:
41、膨胀处理模块,其设置为基于预设像素值的像素对所述第二遥感影像中的标注位置进行膨胀处理,以基于所述目标语义分割模型对经过膨胀处理的所述第二遥感影像进行语义分割。
42、在一种实施方式中,所述装置还包括:
43、转化模块,其设置为将提取的所述道路要素转化为矢量化信息;
44、可视化展示模块,其设置为将所述矢量化信息叠加至所述第一遥感影像中,并对叠加有所述矢量化信息的所述第一遥感影像进行可视化展示。
45、在一种实施方式中,所述装置还包括:
46、骨架提取模块,其设置为提取所述道路要素的骨架信息,得到骨架提取图像;
47、所述转化模块,具体设置为遍历当前骨架提取图像中的每个像素点,基于所述第一遥感影像或者所述第二遥感影像的经纬度坐标信息,将每个所述像素点映射为对应的经纬度坐标,以得到所述道路要素对应的经纬度坐标。
48、根据本技术的第三方面,提供一种计算机设备,包括:处理器,以及与所述处理器通信连接的存储器;所述存储器存储计算机执行指令;所述处理器执行所述存储器存储的计算机执行指令,以实现所述的基于遥感影像的道路要素提取方法。
49、根据本技术的第四方面,提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机执行指令或者程序,所述计算机执行指令或者程序被处理器执行时用于实现所述的基于遥感影像的道路要素提取方法。
50、根据本技术的第五方面,提供一种计算机程序产品,所述计算机程序产品中存储有计算机执行指令或者程序,所述计算机执行指令或者程序被处理器执行时用于实现所述的基于遥感影像的道路要素提取方法。
51、本技术提供的基于遥感影像的道路要素提取方法、装置及设备,通过获取目标区域的遥感影像,同时对遥感影像中待提取的道路要素进行标注处理,并基于目标语义分割模型对标注处理后的遥感影像进行语义分割,获取经过语义分割后的道路要素,无需利用采集车加装多种传感器对道路进行实地采集,即可根据需求获取对应区域的道路图像,大幅节约了设备成本和人力成本,并且在进行道路要素提取之前,对图像进行标注处理,并输入至语义分割模型进行语义分割以提取道路要素,替代直接利用网络模型对图像数据进行训练,简化了训练难度,并有效提高了精度。
- 还没有人留言评论。精彩留言会获得点赞!