一种通过机器人辅助进行的相机内参校验方法和装置与流程
本发明涉及视觉测量,尤其是涉及一种通过机器人辅助进行的相机内参校验方法和装置。
背景技术:
1、现有技术中,一般采用重投影误差对相机内参标定的准确性进行评价,在识别相机外参之后,将标定板标志点的世界坐标通过相机外参转换到相机坐标系内,再代入相机的成像模型内得到理论的标志点投影像素位置,和实际检测到的标志点像素位置进行作差,最后取像素偏差距离的均值作为重投影误差。
2、然而,上述重投影误差对相机内参标定的准确性进行评价的方式,在某些情况下可能出现重投影误差较小但内参却有很大偏差的情况(比如采集图像时标定板集中在一个区域内、标定板的姿态无明显变化、采集的标定板图像数量过少等),导致最终识别的相机外参不正确。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种通过机器人辅助进行的相机内参校验方法和装置,通过机器人带动标定板进行特定动作从而进行相机内参的校验,实现了通过机器人辅助进行校验,防止相机内参出现过大的偏差,为验证相机内参的准确性提供额外的依据。
2、本发明实施例带来了以下有益效果:
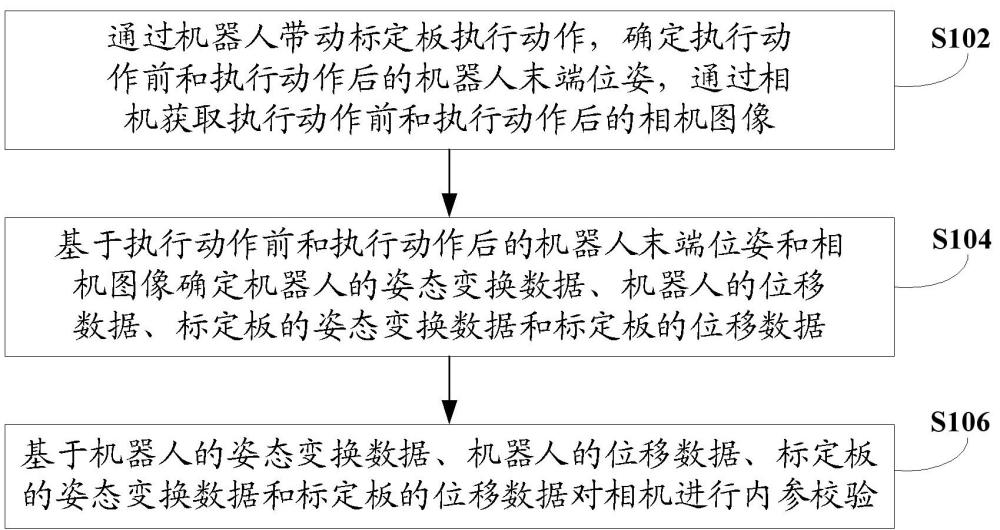
3、本发明实施例提供了一种通过机器人辅助进行的相机内参校验方法和装置,通过机器人带动标定板执行动作,确定执行动作前和执行动作后的机器人末端位姿,通过相机获取执行动作前和执行动作后的相机图像;基于执行动作前和执行动作后的机器人末端位姿和相机图像确定机器人的姿态变换数据、机器人的位移数据、标定板的姿态变换数据和标定板的位移数据;基于机器人的姿态变换数据、机器人的位移数据、标定板的姿态变换数据和标定板的位移数据对相机进行内参校验。该方式中,通过机器人带动标定板进行特定动作从而进行相机内参的校验,实现了通过机器人辅助进行校验,可以防止相机内参出现过大的偏差,为验证相机内参的准确性提供额外的依据。
4、本公开的其他特征和优点将在随后的说明书中阐述,或者,部分特征和优点可以从说明书推知或毫无疑义地确定,或者通过实施本公开的上述技术即可得知。
5、为使本公开的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
技术特征:
1.一种通过机器人辅助进行的相机内参校验方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,通过机器人带动标定板执行动作的步骤,包括:
3.根据权利要求2所述的方法,其特征在于,执行动作前的机器人末端位姿包括:沿机器人末端坐标系的x轴、y轴和z轴执行旋转动作和平移动作前的机器人末端位姿,执行动作后的机器人末端位姿包括:沿机器人末端坐标系的x轴、y轴和z轴执行旋转动作和平移动作后的机器人末端位姿;
4.根据权利要求3所述的方法,其特征在于,基于执行动作前和执行动作后的所述机器人末端位姿和所述相机图像确定所述机器人的姿态变换数据、所述机器人的位移数据、所述标定板的姿态变换数据和所述标定板的位移数据的步骤,包括:
5.根据权利要求4所述的方法,其特征在于,基于沿机器人末端坐标系的x轴、y轴和z轴执行旋转动作前和旋转动作后的机器人末端位姿确定所述机器人的姿态变换数据的步骤,包括:
6.根据权利要求4所述的方法,其特征在于,基于沿机器人末端坐标系的x轴、y轴和z轴执行旋转动作前和旋转动作后的相机图像确定所述标定板的姿态变换数据的步骤,包括:
7.根据权利要求4所述的方法,其特征在于,基于沿机器人末端坐标系的x轴、y轴和z轴执行平移动作前和平移动作后的机器人末端位姿确定所述机器人的位移数据的步骤,包括:
8.根据权利要求4所述的方法,其特征在于,基于沿机器人末端坐标系的x轴、y轴和z轴执行平移动作前和平移动作后的相机图像确定所述标定板的位移数据的步骤,包括:
9.根据权利要求4所述的方法,其特征在于,基于所述机器人的姿态变换数据、所述机器人的位移数据、所述标定板的姿态变换数据和所述标定板的位移数据对所述相机进行内参校验的步骤,包括:
10.一种通过机器人辅助进行的相机内参校验装置,其特征在于,所述装置包括:
技术总结
本发明提供了一种通过机器人辅助进行的相机内参校验方法和装置。其中,该方法包括:通过机器人带动标定板执行动作,确定执行动作前和执行动作后的机器人末端位姿,通过相机获取执行动作前和执行动作后的相机图像;基于执行动作前和执行动作后的机器人末端位姿和相机图像确定机器人的姿态变换数据、机器人的位移数据、标定板的姿态变换数据和标定板的位移数据;基于机器人的姿态变换数据、机器人的位移数据、标定板的姿态变换数据和标定板的位移数据对相机进行内参校验。实现了通过机器人辅助进行校验,通过机器人带动标定板进行特定动作从而进行相机内参的校验,可以防止相机内参出现过大的偏差,为验证相机内参的准确性提供额外的依据。
技术研发人员:李叙,曹彬,陈海永,胡江洪,刘坤,陈立名,邹昆霖,田楷,王敏雪,焦璐
受保护的技术使用者:菲特(天津)检测技术有限公司
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!