逆流中的避让行为的仿真方法和装置
本公开涉及计算机,尤其涉及逆流中的避让行为的仿真方法和装置。
背景技术:
1、作为交通出行的重要组成部分,行人的舒适性和安全性一直是研究的重点。在过去的几十年中,学者们对行人动力学进行了大量研究,并提出了多种微观模拟模型来模拟行人行为。
2、相关技术中,这些微观模拟模型在对逆流中的避让行为进行仿真时,行人在碰到障碍物如墙壁或其他行人时,会选择改变运动方向、停止运动或绕行,可见,这些微观模拟模型均忽略了行人通过侧向行为也就是旋转行为与障碍物保持距离,以避免产生碰撞。
技术实现思路
1、有鉴于此,本公开实施例提供了一种逆流中的避让行为的仿真方法和装置,以解决相关技术中存在的问题。
2、本公开实施例的第一方面,提供了一种逆流中的避让行为的仿真方法,包括:
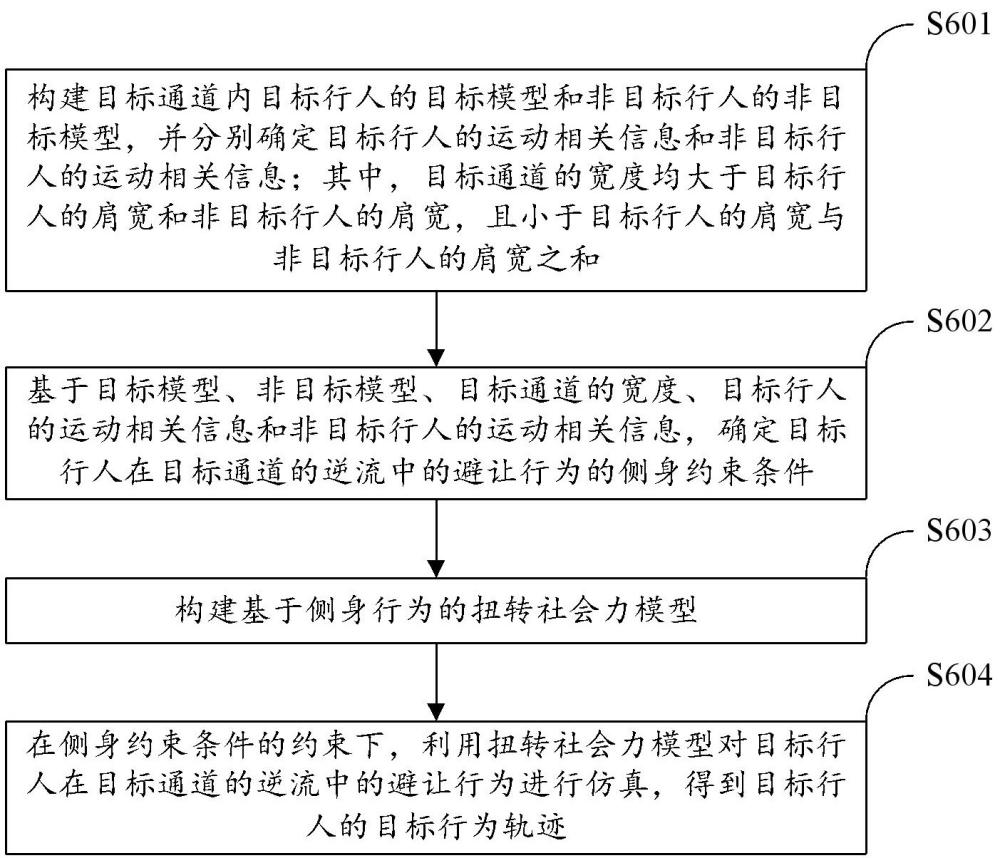
3、构建目标通道内目标行人的目标模型和非目标行人的非目标模型,并分别确定所述目标行人的运动相关信息和所述非目标行人的运动相关信息;其中,所述目标通道的宽度均大于所述目标行人的肩宽和所述非目标行人的肩宽,且小于所述目标行人的肩宽与所述非目标行人的肩宽之和;
4、基于所述目标模型、所述非目标模型、所述目标通道的宽度、所述目标行人的运动相关信息和所述非目标行人的运动相关信息,确定所述目标行人在所述目标通道的逆流中的避让行为的侧身约束条件;
5、构建基于侧身行为的扭转社会力模型;
6、在所述侧身约束条件的约束下,利用所述扭转社会力模型对所述目标行人在所述目标通道的逆流中的避让行为进行仿真,得到所述目标行人的目标行为轨迹。
7、本公开实施例的第二方面,提供了一种逆流中的避让行为的仿真装置,包括:
8、构建模块,用于构建目标通道内目标行人的目标模型和非目标行人的非目标模型,并分别确定所述目标行人的运动相关信息和所述非目标行人的运动相关信息;其中,所述目标通道的宽度均大于所述目标行人的肩宽和所述非目标行人的肩宽,且小于所述目标行人的肩宽与所述非目标行人的肩宽之和;
9、处理模块,用于基于所述目标模型、所述非目标模型、所述目标通道的宽度、所述目标行人的运动相关信息和所述非目标行人的运动相关信息,确定所述目标行人在所述目标通道的逆流中的避让行为的侧身约束条件;
10、所述构建模块还用于构建基于侧身行为的扭转社会力模型;
11、仿真模块,用于在所述侧身约束条件的约束下,利用所述扭转社会力模型对所述目标行人在所述目标通道的逆流中的避让行为进行仿真,得到所述目标行人的目标行为轨迹。
12、本公开实施例的第三方面,提供了一种电子设备,包括:至少一个处理器;用于存储至少一个处理器可执行指令的存储器;其中,至少一个处理器用于执行指令,以实现上述方法的步骤。
13、本公开实施例的第四方面,提供了一种计算机可读存储介质,当计算机可读存储介质中的指令由电子设备的处理器执行时,使得电子设备能够执行上述方法的步骤。
14、本公开实施例采用的上述至少一个技术方案能够达到以下有益效果:通过构建目标通道内目标行人的目标模型和非目标行人的非目标模型,并分别确定目标行人的运动相关信息和非目标行人的运动相关信息;其中,目标通道的宽度均大于目标行人的肩宽和非目标行人的肩宽,且小于目标行人的肩宽与非目标行人的肩宽之和;基于目标模型、非目标模型、目标通道的宽度、目标行人的运动相关信息和非目标行人的运动相关信息,确定目标行人在目标通道的逆流中的避让行为的侧身约束条件;构建基于侧身行为的扭转社会力模型;在侧身约束条件的约束下,利用扭转社会力模型对目标行人在目标通道的逆流中的避让行为进行仿真,得到目标行人的目标行为轨迹,能够基于行人的侧身行为,对目标行人在逆流中的避让行为进行仿真,提高了仿真的真实性。
技术特征:
1.一种逆流中的避让行为的仿真方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述运动相关信息包括身体旋转宽度,所述目标行人的身体旋转宽度和所述非目标行人的身体旋转宽度之和小于或等于所述目标通道的宽度,所述侧身约束条件包括侧倾角约束;所述基于所述目标模型、所述非目标模型、所述目标通道的宽度、所述目标行人的运动相关信息和所述非目标行人的运动相关信息,确定所述目标行人在所述目标通道的逆流中的避让行为的侧身约束条件,包括:
3.根据权利要求2所述的方法,其特征在于,若所述目标行人和所述非目标行人同时旋转,定义:
4.根据权利要求2所述的方法,其特征在于,所述运动相关信息还包括旋转行为可接受心理距离,所述侧身约束条件还包括侧身距离约束;所述基于所述目标模型、所述非目标模型、所述目标通道的宽度、所述目标行人的运动相关信息和所述非目标行人的运动相关信息,确定所述目标行人在所述目标通道的逆流中的避让行为的侧身约束条件,还包括:
5.根据权利要求4所述的方法,其特征在于,所述运动相关信息还包括初始位置和期望速度,所述侧身约束条件还包括侧身时间约束;所述基于所述目标模型、所述非目标模型、所述目标通道的宽度、所述目标行人的运动相关信息和所述非目标行人的运动相关信息,确定所述目标行人在所述目标通道的逆流中的避让行为的侧身约束条件,还包括:
6.根据权利要求1所述的方法,其特征在于,所述构建基于侧身行为的扭转社会力模型,包括:
7.根据权利要求1~6中任一项所述的方法,其特征在于,所述扭转社会力模型通过下述公式进行表示:
8.一种逆流中的避让行为的仿真装置,其特征在于,包括:
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,当所述计算机可读存储介质中的指令由电子设备的处理器执行时,使得所述电子设备能够执行如权利要求1~7中任一项所述的方法的步骤。
技术总结
本公开涉及逆流中的避让行为的仿真方法和装置。该方法包括:构建目标通道内目标行人的目标模型和非目标行人的非目标模型,并分别确定目标行人的运动相关信息和非目标行人的运动相关信息;基于目标模型、非目标模型、目标通道的宽度、目标行人的运动相关信息和非目标行人的运动相关信息,确定目标行人在目标通道的逆流中的避让行为的侧身约束条件;构建基于侧身行为的扭转社会力模型;在侧身约束条件的约束下,利用扭转社会力模型对目标行人在目标通道的逆流中的避让行为进行仿真,得到目标行人的目标行为轨迹。本公开能够基于行人的侧身行为,对目标行人在逆流中的避让行为进行仿真,提高了仿真的真实性。
技术研发人员:彭靖萱,魏中华,王世豪,佟雪莹,李永行,陈艳艳,王少帆,李昀轩
受保护的技术使用者:北京工业大学
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!