基于北斗和低空遥感数据的协同感知网络构建方法与流程
本发明涉及数据处理,具体涉及基于北斗和低空遥感数据的协同感知网络构建方法。
背景技术:
1、北斗定位是指利用北斗卫星导航系统进行定位的技术。北斗卫星导航系统是中国自主研发的全球卫星导航系统,与gps、glonass、galileo并称为全球四大卫星导航系统之一。北斗定位的工作原理是通过接收北斗卫星发送的信号,计算出接收机的经度、纬度、高度和时间等信息。首次定位至少需要4颗卫星,以达到3d定位的精确度。低空遥感是指利用飞行高度较低(一般指高度在1000米以下的空域)的航空平台,如无人机、轻型飞机等,搭载各种传感器,从空中获取地球表面信息的科学技术。低空遥感是一种非接触、远距离的探测技术,通过传感器或遥感器获取目标地物的反射、辐射或散射的电磁波信息,并进行处理和分析。低空遥感主要应用于以下场景:国土资源调查:用于突发应急监测、重点区域监测、遥感采样定标等。农业:进行农业资源调查、精准施肥、喷洒农药、土地确权等工作。城市治理:用于河道巡防、违章建筑监测等。森林防火:提供远程监控、日常巡护、应急飞行等服务。
2、协同感知(collaborative perception)是一种通过多传感器协作增强感知效果的技术,涉及数据处理、分布式计算和人工智能(ai)。它通过多个传感器之间的相互协作,整合传感器收集到的数据,以产生更准确、更完整的感知结果。协同感知解决了单体感知中远距离遮挡和稀疏数据的问题,通常涉及的算法和技术包括数据处理、分布式计算和人工智能,在多无人机低空遥感数据和北斗数据的融合中,传统技术通常需要将多个传感器进行时间同步,再将数据进行融合,时间同步是一个复杂的算法并且计算量很大,导致北斗数据和低空遥感数据的协同感知效率低。
技术实现思路
1、本发明的目的是提供基于北斗和低空遥感数据的协同感知网络构建方法,该方法通过北斗定位系统与低空遥感系统进行协同感知,可以精确地获得待测目标地的三维模型地图,能够协助国土资源调查,农业资源调查和城市日常远程监控和日常巡护。
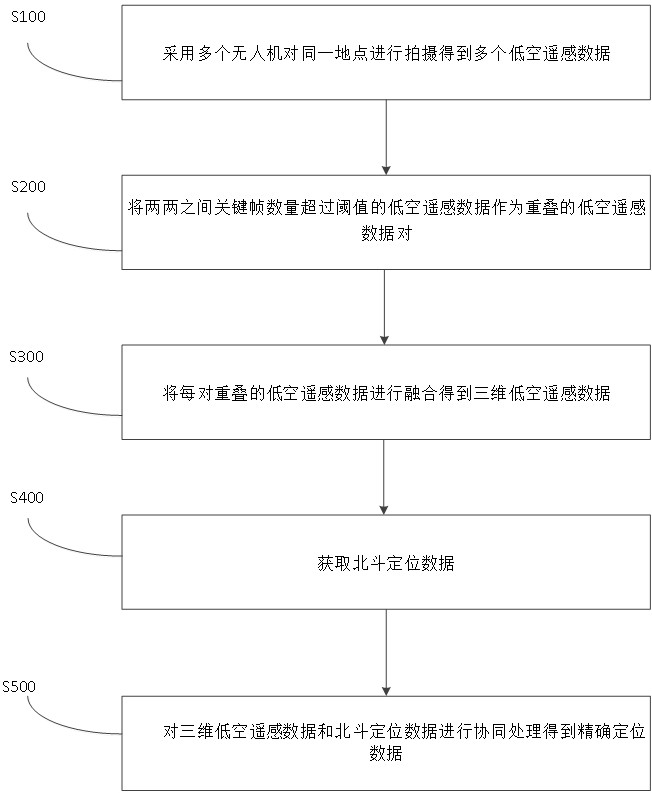
2、基于北斗和低空遥感数据的协同感知网络构建方法,包括:
3、采用多个无人机对同一地点进行拍摄得到多个低空遥感数据;
4、将两两之间关键帧相似度超过阈值的低空遥感数据作为重叠的低空遥感数据对;
5、将每对重叠的低空遥感数据进行融合得到三维低空遥感数据;
6、获取北斗定位数据;
7、对所述三维低空遥感数据和北斗定位数据进行协同处理得到精确定位数据。
8、优选地,所述将两两之间关键帧相似度超过阈值的低空遥感数据作为重叠的低空遥感数据对包括:
9、将关键帧相似度超过阈值的两个低空遥感数据作为相邻的低空遥感数据;
10、将相邻的遥感数据进行拼接得到三维低空遥感数据。
11、优选地,所述对所述三维低空遥感数据和北斗定位数据进行协同处理得到精确定位数据包括:
12、识别三维低空遥感数据中的关键特征;
13、计算所述关键特征与北斗定位数据的相似度;
14、如果相似度小于预设值,则采用北斗定位数据对三维低空遥感数据进行修正。
15、优选地,所述识别三维低空遥感数据中的关键特征包括:
16、采用yolov8网络,检测遥感数据中的关键特征,输出多个特征点;
17、所述yolov8网络包括:输入层、backbone层、neck层、head层和输出层;
18、采用基于正样本分配策略作为损失函数。
19、优选地,所述如果相似度小于预设值,则采用北斗定位数据对三维低空遥感数据进行修正包括:
20、根据北斗定位数据和三维低空遥感数据计算定位修正因子;
21、根据定位修正因子对三维低空遥感数据进行修正。
22、优选地,所述计算所述关键特征与北斗定位数据的相似度包括:
23、根据关键特征与北斗定位数据的距离判断关键特征与北斗定位数据的相似度。
24、优选地,所述将关键帧相似度超过阈值的两个低空遥感数据作为相邻的低空遥感数据包括:
25、根据视图夹角、重叠面积和尺度因子计算每个遥感数据的得分;
26、根据每个遥感数据的得分判断哪两对遥感数据属于相邻。
27、基于北斗和低空遥感数据的协同感知网络构建系统,包括:
28、数据获取模块,用于获取低空遥感数据和北斗定位数据;
29、数据处理模块,对所述低空遥感数据和北斗定位数据进行协同处理得到精确定位数据;
30、路径规划模块,用于根据所述精确定位数据构建导航路径。
31、一种电子设备,包括:芯片、处理器和存储器,所述存储器用于存储计算机程序代码,所述计算机程序代码包括计算机指令,在所述芯片执行所述计算机指令的情况下,所述电子设备执行基于北斗和低空遥感数据的协同感知网络构建方法。
32、一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机程序,所述计算机程序包括程序指令,所述程序指令在被电子设备的处理器执行的情况下,使所述处理器执行基于北斗和低空遥感数据的协同感知网络构建方法。
33、本发明的有益效果在于:1.本发明首先对多个无人机拍摄的遥感数据集合进行处理,筛选出可以进行拼接的遥感数据对,融合多个遥感数据对得到初步的三维低空遥感数据;2.本发明利用北斗定位数据对三维低空遥感数据进行协同处理,最后得到精确的定位数据,能够协助国土资源调查,农业资源调查和城市日常远程监控和日常巡护;3.本发明无需对多个传感器的时间进行同步,而是通过建立每个低空遥感数据的得分以及和北斗数据的相似度进行低空遥感数据以及北斗数据的融合,算法更加简单,工作效率高。
技术特征:
1.基于北斗和低空遥感数据的协同感知网络构建方法,其特征在于,包括:
2.根据权利要求1所述的基于北斗和低空遥感数据的协同感知网络构建方法,其特征在于,所述将两两之间关键帧相似度超过阈值的低空遥感数据作为重叠的低空遥感数据对包括:
3.根据权利要求1所述的基于北斗和低空遥感数据的协同感知网络构建方法,其特征在于,所述对所述三维低空遥感数据和北斗定位数据进行协同处理得到精确定位数据包括:
4.根据权利要求3所述的基于北斗和低空遥感数据的协同感知网络构建方法,其特征在于,所述识别三维低空遥感数据中的关键特征包括:
5.根据权利要求3所述的基于北斗和低空遥感数据的协同感知网络构建方法,其特征在于,所述如果相似度小于预设值,则采用北斗定位数据对三维低空遥感数据进行修正包括:
6.根据权利要求3所述的基于北斗和低空遥感数据的协同感知网络构建方法,其特征在于,所述计算所述关键特征与北斗定位数据的相似度包括:
7.根据权利要求2所述的基于北斗和低空遥感数据的协同感知网络构建方法,其特征在于,所述将关键帧相似度超过阈值的两个低空遥感数据作为相邻的低空遥感数据包括:
8.基于北斗和低空遥感数据的协同感知网络构建系统,其特征在于,包括:
9.一种电子设备,其特征在于,包括:芯片、处理器和存储器,所述存储器用于存储计算机程序代码,所述计算机程序代码包括计算机指令,在所述芯片执行所述计算机指令的情况下,所述电子设备执行如权利要求1至7中任一项所述的基于北斗和低空遥感数据的协同感知网络构建方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中存储有计算机程序,所述计算机程序包括程序指令,所述程序指令在被电子设备的处理器执行的情况下,使所述处理器执行权利要求1至7中任一项所述的基于北斗和低空遥感数据的协同感知网络构建方法。
技术总结
本发明的目的是提供基于北斗和低空遥感数据的协同感知网络构建方法,该方法包括:采用多个无人机对同一地点进行拍摄得到多个低空遥感数据;将两两之间关键帧相似度超过阈值的低空遥感数据作为重叠的低空遥感数据对;将每对重叠的低空遥感数据进行融合得到三维低空遥感数据;获取北斗定位数据;对所述三维低空遥感数据和北斗定位数据进行协同处理得到精确定位数据。本发明通过北斗定位系统与低空遥感系统进行协同感知,可以精确地获得待测目标地的三维模型地图,能够协助国土资源调查,农业资源调查和城市日常远程监控和日常巡护。
技术研发人员:吴顺民,刘雪璐,李佳馨,胡小丹,王月然
受保护的技术使用者:广东新禾智慧数字科技有限公司
技术研发日:
技术公布日:2025/4/28
- 还没有人留言评论。精彩留言会获得点赞!