一种城市综合管廊轨道巡检机器人自主充电站的制作方法
1.本实用新型涉及一种城市综合管廊轨道巡检机器人自主充电站,属于管廊巡检设备技术领域。
背景技术:
2.城市综合管廊,是指于城市地下建造、将各种工程管线集于其中的隧道空间,是保障城市运行的重要基础设施;由于城市综合管廊中设备能否正常运转关系到整个城市能否正常运行,城市综合管廊内需要时刻进行相关设备的巡逻检查;最初巡检是由人工进行,但由于管廊的覆盖范围之广,最终改由巡检机器人进行;管廊巡检机器人一般为吊轨式,即在管廊顶端假设轨道,巡检机器人在轨道上移动对管廊进行巡检;
3.巡检机器人均为电力驱动,二巡检机器人由于特殊的移动方式,其充电方式一般为人工进行或是定点设立充电桩;而由于轨道移动单一同行的特点,施工人员一般会采用某一段轨道的巡检机器人由一个充电桩负责充电,这样在轨道交汇处附近就需要针对轨道数量设立对应数量的充电桩,大大增加了安装成本;另外,充电桩预警能力差,作为与外界电源线路连接的设备,管廊内一旦发生设备故障就有可能造成电力泄露等众多安全隐患。
4.基于此,急需一种安全性较高、适用于轨道交汇处的城市综合管廊轨道巡检机器人自主充电站。
技术实现要素:
5.本实用新型要解决的技术问题是:如何设计一种城市综合管廊轨道巡检机器人自主充电站,使它能接收并处理多个巡检机器人的充电要求。
6.为了解决上述技术问题,本实用新型的技术方案是提供了一种城市综合管廊轨道巡检机器人自主充电站,其特征在于,包括多条连接的导向轨道,每条导向轨道上设有可移动的巡检机器人和红外感应器,在导向轨道的连接处下方设有充电组件,在导向轨道连接处的侧面设有控制组件,所述的充电组件包括轴承、伺服电机和旋转座,轴承固定在导向轨道交汇处的内部下端,伺服电机固定在导向轨道交汇处的内部上端,旋转座与轴承的下端连接,旋转座的前侧设有充电座,充电座前侧上部对称设有两个插头,充电座前侧下部设有触发开关,在旋转座的底部设有监控探头。
7.优选的,所述的控制组件包括机箱,机箱内部设有控制模块,机箱两侧各设有一个节臂一,每个节臂一的端部与连接关节连接,两个连接关节的端部均设有节臂二,两个节臂二之间设有触屏控制器,触屏控制器下端设有把手,所述的机箱与充电座电性连接。
8.优选的,所述的机箱的一侧设有温湿度传感器,机箱内部设有电控器,充电座和伺服电机均与电控器电性连接,机箱上端设有蜂鸣器和警示灯,蜂鸣器位于警示灯的一侧,蜂鸣器和警示灯均与电控器电性连接。
9.优选的,所述的旋转座上端设有转轴,转轴过盈配合在轴承内部,转轴端部与伺服电机输出轴端部通过联轴器连接。
10.优选的,所述旋转座下端设有监控探头,监控探头上转动设置有数字摄像头和红外摄像头,机箱内部设有图像处理模块和传输模块,传输模块与外部上级控制端传输连接,图像处理模块包括图像压缩模块和图像识别模块,机箱侧端设有温湿度传感器。
11.优选的,不使用时,触屏控制器通过节臂一和节臂二折叠收纳在机箱的后侧,使用者手持把手将触屏控制器拉下,读取本装置相关数据并对数据进行管理,使用完成后使用者将触屏控制器推回收纳位置,阻尼转轴保证触屏控制器在无外力作用时位置不会移动,方便收纳。
12.优选的,工作过程中,监控探头采集管廊内的数字成像以及热成像画面,确认管廊内是否存在非工作人员以及异常温度情况,并将画面经过压缩后传输至上级控制端,方便使用者对管廊内情况进行定点监控,温湿度传感器同时检测本装置附近的温度以及湿度情况,发现温湿度传感器发现异常的温度或湿度变化,控制模块接收异常信号,经由传输模块向上级控制端发送警告,并控制监控探头转动搜索异常位置,方便使用者发现、快速处理异常情况,减少损失。
13.优选的,机箱内的电控器将外部电源转化后供给充电组件用于伺服电机转动以及巡检机器人的充电,当电路发生故障时,控制模块先向上级控制端发送信号,然后控制模块控制电控器停止向充电组件的供电,同时开启蜂鸣器和警报灯,提醒使用者进行检修。
14.本实用新型的工作原理是:使用者安装本装置,将机箱与外部电源与上级控制端信号源连接,巡检机器人电量较低、不足以完成巡检任务时将通过导向轨道中的一条轨道移动至对应位置的红外感应器,红外感应器识别巡检机器人,向控制模块发送信号,控制模块接收信号,识别巡检机器人所处轨道方向,控制伺服电机启动,带动充电组件旋转至正对巡检机器人,再向巡检机器人发送指令,巡检机器人前进,移动至插头前端,插头卡接进入巡检机器人内部,巡检机器人抵触触发开关时插头与巡检机器人完成接触,控制模块接收来自触发开关的触发信号,开启供电线路,巡检机器人开始充电;当有若干个巡检机器人从不同轨道先后到达对应的红外感应器时,控制模块接收信号并判断到达时间先后,根据巡检机器人的到达时间先后控制充电组件对不同巡检机器人重复上述步骤,直至各巡检机器人充电完成。
15.与现有技术相比,本城市综合管廊轨道巡检机器人自主充电站具有以下优点:
16.1、通过导向轨道、充电组件和红外感应器配合,接收多个方向轨道的巡检机器人的充电信号,按照到达顺序依次充电,工作高效,安装成本较低。
17.2、通过控制组件,提供充电的同时对周围环境进行定点监控,发现故障能够及时预警,保障管廊内安全性。
附图说明
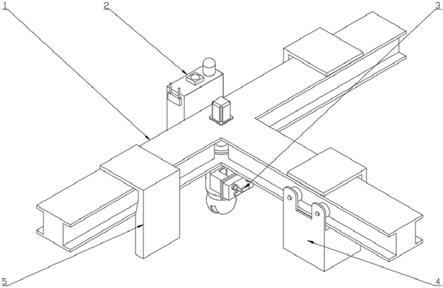
18.图1是本实用新型的立体结构示意图;
19.图2是本实用新型中充电组件的正视结构示意图;
20.图3是本实用新型中控制组件的立体结构示意图;
21.图4是本实用新型中控制组件折叠收纳时的侧视结构示意图;
22.图中:1
‑
导向轨道、2
‑
控制组件、201
‑
机箱、202
‑
节臂一、203
‑
连接关节、204
‑
节臂二、205
‑
触屏控制器、206
‑
把手、207
‑
温湿度传感器、208
‑
蜂鸣器、209
‑
警示灯、3
‑
充电组件、
301
‑
轴承、302
‑
伺服电机、303
‑
旋转座、304
‑
充电座、305
‑
监控探头、306
‑
触发开关、307
‑
插头、4
‑
巡检机器人、5
‑
红外感应器。
具体实施方式
23.为使本实用新型更明显易懂,兹以优选实施例,并配合附图作详细说明如下。
24.如图1
‑
4所示,本实施例提供了一种城市综合管廊轨道巡检机器人自主充电站,包括控制组件2、充电组件3和若干个红外感应器5,充电组件3位于若干导向轨道1的交汇处,红外感应器5分别固定在若干导向轨道1上,在本实施例中,上述固定方式为螺栓连接,巡检机器人4在导向轨道1上移动,控制组件2包括机箱201,机箱201内部设有控制模块,充电组件3包括轴承301、伺服电机302和旋转座303,在本实施例中,上述红外感应器5和伺服电机302均为现有技术产品,可直接在市场上购买使用,轴承301固定在导向轨道1交汇处的内部下端,在本实施例中,上述固定方式为过盈配合,伺服电机302固定在导向轨道1交汇处的内部上端,在本实施例中,上述固定方式为螺栓连接,旋转座303上端设有转轴,转轴过盈配合在轴承301内部,转轴端部与伺服电机302输出轴端部通过联轴器连接,旋转座303前侧设有充电座304,充电座304与机箱201电性连接,充电座304前侧上部对称设有两个插头307,充电座304前侧下部设有触发开关306;
25.使用者安装本装置,将机箱201与外部电源与上级控制端信号源连接,巡检机器人4电量较低、不足以完成巡检任务时将通过导向轨道1中的一条轨道移动至对应位置的红外感应器5,红外感应器5识别巡检机器人4,向控制模块发送信号,控制模块接收信号,识别巡检机器人4所处轨道方向,控制伺服电机302启动,带动充电组件3旋转至正对巡检机器人4,再向巡检机器人4发送指令,巡检机器人4前进,移动至插头307前端,插头307卡接进入巡检机器人4内部,巡检机器人4抵触触发开关306时插头307与巡检机器人4完成接触,控制模块接收来自触发开关306的触发信号,开启供电线路,巡检机器人4开始充电;当有若干个巡检机器人4从不同轨道先后到达对应的红外感应器5时,控制模块接收信号并判断到达时间先后,根据巡检机器人4的到达时间先后控制充电组件3对不同巡检机器人4重复上述步骤,直至各巡检机器人4充电完成。
26.机箱201两侧各铰接有节臂一202,两个节臂一202端部均铰接有连接关节203,两个连接关节203端部均铰接有节臂二204,两个节臂二204之间铰接有触屏控制器205,触屏控制器205下端设有把手206,各铰接部分均使用阻尼转轴进行连接;
27.不使用时,触屏控制器205通过节臂一202和节臂二204折叠收纳在机箱201的后侧,使用者手持把手206将触屏控制器205拉下,读取本装置相关数据并对数据进行管理,使用完成后使用者将触屏控制器205推回收纳位置,阻尼转轴保证触屏控制器205在无外力作用时位置不会移动,方便收纳。
28.旋转座303下端设有监控探头305,监控探头305上转动设置有数字摄像头和红外摄像头,机箱201内部设有图像处理模块和传输模块,传输模块与外部上级控制端传输连接,图像处理模块包括图像压缩模块和图像识别模块,机箱201侧端设有温湿度传感器207;
29.工作过程中,监控探头305采集管廊内的数字成像以及热成像画面,确认管廊内是否存在非工作人员以及异常温度情况,并将画面经过压缩后传输至上级控制端,方便使用者对管廊内情况进行定点监控,温湿度传感器207同时检测本装置附近的温度以及湿度情
况,发现温湿度传感器207发现异常的温度或湿度变化,控制模块接收异常信号,经由传输模块向上级控制端发送警告,并控制监控探头305转动搜索异常位置,方便使用者发现、快速处理异常情况,减少损失。
30.机箱201内部设有电控器,充电座304和伺服电机302均与电控器电性连接,机箱201上端设有蜂鸣器208和警示灯209,蜂鸣器208位于警示灯209的侧端,蜂鸣器208和警示灯209均与电控器电性连接;
31.电控器将外部电源转化后供给充电组件3用于伺服电机302转动以及巡检机器人4的充电,当电路发生故障时,控制模块先向上级控制端发送信号,然后控制模块控制电控器停止向充电组件3的供电,同时开启蜂鸣器208和警报灯209,提醒使用者进行检修。
32.本实用新型的工作原理:
33.使用者安装本装置,将机箱201与外部电源与上级控制端信号源连接,使用者手持把手206将触屏控制器205拉下,读取本装置相关数据并对数据进行管理,使用完成后使用者将触屏控制器205推回收纳位置,巡检机器人4电量较低、不足以完成巡检任务时将通过导向轨道1中的一条轨道移动至对应位置的红外感应器5,红外感应器5识别巡检机器人4,向控制模块发送信号,控制模块接收信号,识别巡检机器人4所处轨道方向,控制伺服电机302启动,带动充电组件3旋转至正对巡检机器人4,再向巡检机器人4发送指令,巡检机器人4前进,移动至插头307前端,插头307卡接进入巡检机器人4内部,巡检机器人4抵触触发开关306时,插头307与巡检机器人4完成接触,控制模块接收来自触发开关306的触发信号,开启供电线路,巡检机器人4开始充电;当有若干个巡检机器人4从不同轨道先后到达对应的红外感应器5时,控制模块接收信号并判断到达时间先后,根据巡检机器人4的到达时间先后控制充电组件3对不同巡检机器人4重复上述步骤,直至各巡检机器人4充电完成;工作过程中,监控探头305采集管廊内的数字成像以及热成像画面,确认管廊内是否存在非工作人员以及异常温度情况,并将画面经过压缩后传输至上级控制端,方便使用者对管廊内情况进行定点监控,温湿度传感器207同时检测本装置附近的温度以及湿度情况,发现温湿度传感器207发现异常的温度或湿度变化,控制模块接收异常信号,经由传输模块向上级控制端发送警告,并控制监控探头305转动搜索异常位置,当电路发生故障时,控制模块先向上级控制端发送信号,同时控制模块控制电控器停止向充电组件3的供电,同时开启蜂鸣器208和警报灯209,提醒使用者进行检修。
34.综上,通过导向轨道1、充电组件3和红外感应器5配合,接收多个方向轨道的巡检机器人4的充电信号,按照到达顺序依次充电,工作高效,安装成本较低;通过控制组件2,提供充电的同时对周围环境进行定点监控,发现故障能够及时预警,保障管廊内安全性。
35.上面对本专利的较佳实施方式作了详细说明,但是本专利并不限于上述实施方式,在本领域的普通技术人员所具备的知识范围内,还可以在不脱离本专利宗旨的前提下做出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1