一种盲盒游艺机抓取装置的制作方法
1.本实用新型涉及盲盒游艺机抓取装置技术领域,特别涉及一种盲盒游艺机抓取装置。
背景技术:
2.盲盒由于内容物的不确定性,用户在拆盒时能够体验到未知所带来的刺激、解压,拆到超乎自己预期的东西,还会带来额外的惊喜,因此盲盒已经成为非常受年轻人欢迎的玩法。
3.现有的盲盒售卖机在用户投币或扫码后通过螺旋输送装置将盲盒顶出,盲盒下落至出货口供用户拾取,这种取盲盒的方式导致用户无法自行选择想要的盲盒,缺乏操作感以及参与感,难以激发游客兴趣。
技术实现要素:
4.本实用新型的目的在于提供一种盲盒游艺机抓取装置,以使用户能够通过操纵该盲盒游艺机抓取装置获取目标盲盒,提升用户的操作感以及参与感,激发用户兴趣,延长用户停留时间。
5.为实现上述目的,本实用新型提供如下技术方案:
6.一种盲盒游艺机抓取装置,包括:
7.抓取机构,所述抓取机构包括机械手掌以及旋转驱动装置,所述旋转驱动装置与所述机械手掌传动连接以驱动所述机械手掌转动;
8.移动机构,所述抓取机构连接于所述移动机构的移动端,所述移动机构用于带动所述抓取机构竖向以及横向移动以使所述抓取机构在盲盒游艺机的盲盒盛放位置与盲盒游艺机的盲盒出口之间移动。
9.可选地,所述旋转驱动装置为驱动电机,所述驱动电机的转轴与所述机械手掌连接。
10.可选地,还包括固定盒,所述旋转驱动装置设置于所述固定盒内,所述机械手掌设置于所述固定盒外,所述旋转驱动装置的驱动端伸出所述固定盒与所述机械手掌连通,所述固定盒设置于所述移动机构的移动端。
11.可选地,所述机械手掌与所述旋转驱动装置的连接处通过双轴承结构与所述固定盒可转动配合。
12.可选地,还包括机械手掌位置检测装置,所述机械手掌位置检测装置包括第一感应件以及两个第一传感器,所述第一感应件设置于所述旋转驱动装置的输出端或所述机械手掌,两个所述第一传感器对应于所述第一感应件沿所述旋转驱动装置的输出端周向均布地固定设置,两个所述第一传感器中的任意一个检测到所述第一感应件时旋转驱动装置停止动作。
13.可选地,所述移动机构包括往复驱动装置、双连杆以及安装支架,所述双连杆的一
端与所述往复驱动装置连接,所述双连杆的另一端与所述抓取机构连接,所述双连杆中与往复驱动装置连接的一个杆件设置有下滑块,所述双连杆中与所述抓取机构连接的一个杆件设置有上滑块,所述安装支架上设置有与所述上滑块滑动配合的上滑轨以及与所述下滑块滑动配合的下滑轨,所述下滑轨的长度方向沿所述往复驱动装置的往复伸缩方向设置,所述上滑轨与所述下滑轨之间的夹角为钝角。
14.可选地,所述移动机构还包括移动位置检测装置,所述移动位置检测装置包括第二感应件以及两个第二传感器,所述第二感应件设置于所述双连杆的一个杆件,两个所述第二传感器沿该杆件的移动路径间隔设置,两个所述第二传感器中的任意一个检测到所述第二感应件时往复驱动装置停止动作。
15.可选地,所述往复驱动装置为活塞缸;或者,所述往复驱动装置为直线电机;或者所述往复驱动装置包括旋转电机以及传动机构。
16.可选地,所述机械手掌包括依次连接的掌部、中间连接部以及远端部,所述掌部与所述中间连接部之间以及所述中间连接部与所述远端部之间的夹角均为钝角以使所述机械手掌形成凹陷结构。
17.可选地,所述掌部、所述中间连接部以及所述远端部这三者中的至少一者上设置有沟槽或镂空孔以增加所述机械手掌的抓取能力。
18.由以上技术方案可以看出,本实用新型中公开了一种盲盒游艺机抓取装置,该盲盒游艺机抓取装置包括抓取机构以及移动机构,其中,抓取机构包括机械手掌以及旋转驱动装置,旋转驱动装置与机械手掌传动连接以驱动机械手掌转动;抓取机构连接于移动机构的移动端,移动机构用于带动抓取机构竖向以及横向移动以使抓取机构在盲盒游艺机的盲盒盛放位置与盲盒游艺机的盲盒出口之间移动,本案中移动机构带动抓取机构竖向移动指与地面垂直方向的移动,横向移动指水平面内至少一个方向的移动;在应用时,用户投币或扫码后,盲盒游艺机启动,然后用户输入抓盲盒指令,移动机构带动抓取机构移动靠近盲盒盛放位置,移动到位后,旋转驱动装置驱动机械手掌转过第一预设角度以抓取盲盒,然后用户输入取盲盒指令,移动机构带动抓取机构靠近盲盒出口,待到位后旋转驱动装置驱动机械手掌转过第二预设角度以将盲盒放入盲盒出口,盲盒沿与盲盒出口连接的滑道滑落至出货口供用户拾取,由此可见,用户可以通过操纵上述盲盒游艺机抓取装置抓取想要的盲盒,提升用户的参与感以及操作感,有助于激发用户兴趣,延长用户在游艺机前的停留时间。
附图说明
19.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
20.图1为本实用新型实施例提供的盲盒游艺机的结构示意图;
21.图2为本实用新型实施例提供的盲盒游艺机抓取装置的爆炸图。
22.其中:
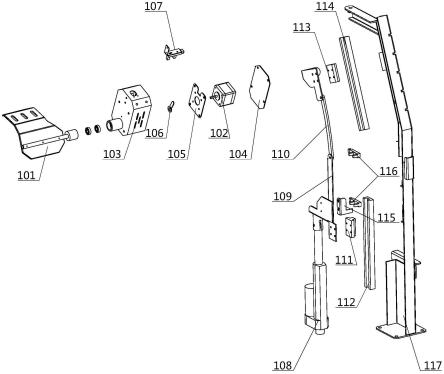
23.1为盲盒游艺机抓取装置;101为机械手掌;102为驱动电机;103 为固定盒前壳;
104为固定盒后盖;105为固定件;106为第一感应件; 107为第一传感器;108为往复驱动装置;109/110为双连杆的两个杆件;111为下滑块;112为下滑轨;113为上滑块;114为上滑轨;115 为第二感应件;116为第二传感器;117为安装支架;2为游艺机主体; 3为投币机构;4为操作台;5为盲盒盛放位置;6为盲盒;7为盲盒出口;8为出货口。
具体实施方式
24.本实用新型的核心是提供一种盲盒游艺机抓取装置,该盲盒游艺机抓取装置的结构设计使用户能够通过操纵该盲盒游艺机抓取装置获取目标盲盒,提升用户的操作感以及参与感,激发用户兴趣,延长用户停留时间。
25.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
26.请参阅图1和图2,图1为本实用新型实施例提供的盲盒游艺机的结构示意图,图2为本实用新型实施例提供的盲盒游艺机抓取装置的爆炸图。
27.本实用新型实施例中公开了一种盲盒游艺机抓取装置1,该盲盒游艺机抓取装置1设置于游艺机主体2上,游艺机主体2包括用于盛放盲盒6以及其他礼品的盲盒盛放位置5、用于投币的投币机构3以及供用户操作的操作台4,当然为增强游艺机的趣味性,游艺机主体2 上还可以设置声光设备,如音响、显示器等等,该盲盒游艺机抓取装置1包括抓取机构以及移动机构。
28.其中,抓取机构包括机械手掌101以及旋转驱动装置,旋转驱动装置与机械手掌101传动连接以驱动机械手掌101转动;抓取机构连接于移动机构的移动端,移动机构用于带动抓取机构竖向以及横向移动以使抓取机构在盲盒游艺机的盲盒盛放位置5与盲盒游艺机的盲盒出口7之间移动,本案中移动机构带动抓取机构竖向移动指与地面垂直方向的移动,横向移动指水平面内至少一个方向的移动。
29.可以看出,与现有技术相比,本实用新型实施例提供的盲盒游艺机抓取装置1在应用时,用户投币或扫码后,盲盒游艺机启动,然后用户输入抓盲盒指令,移动机构带动抓取机构移动靠近盲盒盛放位置 5,移动到位后,旋转驱动装置驱动机械手掌101转过第一预设角度以抓取盲盒6,然后用户输入取盲盒指令,移动机构带动抓取机构靠近盲盒出口7,待到位后旋转驱动装置驱动机械手掌101转过第二预设角度以将盲盒6放入盲盒出口7,盲盒6沿与盲盒出口7连接的滑道滑落至出货口8供用户拾取,由此可见,用户可以通过操纵上述盲盒游艺机抓取装置1抓取想要的盲盒6,提升用户的参与感以及操作感,有助于激发用户兴趣,延长用户在游艺机前的停留时间。
30.如图2所示,在本实用新型实施例中,旋转驱动装置为驱动电机 102,驱动电机102的转轴与机械手掌101连接。
31.进一步地,为便于上述旋转驱动装置的安装固定,如图2所示,上述旋转驱动装置还包括固定盒,旋转驱动装置设置于固定盒内,机械手掌101设置于固定盒外,旋转驱动装置的驱动端伸出固定盒与机械手掌101连通,固定盒设置于移动机构的移动端,固定盒由固定盒前壳103以及固定盒后盖104围成,固定盒内设置有固定件105,旋转驱动装置通过固定
件105设置于固定盒内,旋转驱动装置的驱动端穿过固定盒前壳103与机械手掌101连接,固定盒后盖104固定在移动装置的移动端。
32.为保证机械手掌101与旋转驱动装置连接的稳定性,在本实用新型实施例中,如图2所示,机械手掌101与旋转驱动装置的连接处通过双轴承结构与固定盒可转动配合。
33.上述抓取机构还包括机械手掌位置检测装置,如图2所示,该机械手掌位置检测装置包括第一感应件106以及两个第一传感器107,第一感应件106设置于旋转驱动装置的输出端或机械手掌101,两个第一传感器107对应于第一感应件106沿旋转驱动装置的输出端周向均布地固定设置,两个第一传感器107中的任意一个检测到第一感应件106时旋转驱动装置停止动作,这样当用户输入抓盲盒指令时,旋转驱动装置驱动机械手掌101从当前位置转过180
°
时,其中一个第一传感器107检测到第一感应件106,机械手掌101停止,此时机械手掌101处于抓取姿态,当用户输入取盲盒指令时,旋转驱动装置驱动机械手掌101从抓取姿态继续转过180
°
,进入释放盲盒6姿态。
34.如图2所示,在本实用新型实施例中,上述移动机构包括往复驱动装置108、双连杆以及安装支架117,往复驱动装置108可以为活塞缸,或者往复驱动装置108为直线电机,或者往复驱动装置108包括旋转电机与传动机构,传动机构用于将旋转电机的转动转化为直线往复移动,传动机构包括但不限于齿轮齿条机构、凸轮连杆机构,双连杆的一端与往复驱动装置108连接,双连杆的另一端与抓取机构连接,双连杆中与往复驱动装置108连接的一个杆件设置有下滑块111,双连杆中与抓取机构连接的一个杆件设置有上滑块113,安装支架117 上设置有与上滑块113滑动配合的上滑轨114以及与下滑块111滑动配合的下滑轨112,下滑轨112的长度方向沿往复驱动装置108的往复伸缩方向设置,上滑轨114与下滑轨112之间的夹角为钝角,这样当往复驱动装置108伸缩时,杆件在第一往复驱动装置108的驱动下沿下滑轨112滑动,实现抓取机构的升降,与此同时杆件沿倾斜的上滑轨114滑动,实现抓取机构水平方向的移动。
35.进一步地,移动机构还包括移动位置检测装置,移动位置检测装置包括第二感应件115以及两个第二传感器116,第二感应件115设置于双连杆的一个杆件,两个第二传感器116沿该杆件的移动路径间隔设置,两个第二传感器116中的任意一个检测到第二感应件115时往复驱动装置108停止动作。
36.上述实施例中,往复驱动装置108可以为活塞缸,如气缸或液压缸;或者,往复驱动装置108为直线电机;或者往复驱动装置108包括旋转电机以及传动机构,传动机构用于将旋转电机的旋转转化为直线往复移动。
37.如图2所示,上述机械手掌101包括依次连接的掌部、中间连接部以及远端部,掌部与中间连接部之间以及中间连接部与远端部之间的夹角均为钝角以使机械手掌101形成凹陷结构,以便于抓取盲盒6。
38.进一步优化上述技术方案,上述掌部、中间连接部以及远端部这三者中的至少一者上设置有沟槽或镂空孔以增加机械手掌101的抓取能力。
39.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
40.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本实用新型。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定
义的一般原理可以在不脱离本实用新型的精神或范围的情况下,在其它实施例中实现。因此,本实用新型将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1