热气球飞行导航、状态监测和预警的系统及方法
1.本发明涉及热气球技术领域,特别涉及一种热气球飞行导航、状态监测和预警的系统及方法。
背景技术:
2.热气球的基本原理是热胀冷缩,燃烧机是热气球飞行的关键所在,燃烧机将点燃加温的气体由气囊下边的端口往上喷到气囊,暖空气集聚在气囊中造成升力,使热气球能够拖起载人的吊篮一同起飞。目前,基于热气球飞行导航、状态监测和预警的系统或方法相对较少,无法对热气球运行时进行飞行导航,无法对热气球的状态进行监测和预警,无法为异常事件或事故提供数据分析的支撑。
技术实现要素:
3.本发明提供了一种热气球飞行导航、状态监测和预警的系统及方法,其目的是为了解决无法对热气球运行时进行飞行导航和无法对热气球的状态进行监测和预警的问题。
4.为了达到上述目的,本发明的实施例提供了一种热气球飞行导航、状态监测和预警的系统,包括:
5.主控芯片;
6.4g通信模块,所述4g通信模块与所述主控芯片的第一端电连接;
7.气压计,所述气压计与所述主控芯片的第二端电连接;
8.惯性单元,所述惯性单元与所述主控芯片的第三端电连接;
9.电池模块,所述电池模块与所述主控芯片的第四端电连接;
10.导航单元,所述导航单元与所述主控芯片的第五端电连接;
11.数据存储模块,所述数据存储模块与所述主控芯片的第六端电连接;
12.摄像头模块,所述摄像头模块与所述主控芯片的第七端电连接;
13.显示模块,所述显示模块与所述主控芯片的第八端电连接;
14.无线接收模块,所述无线接收模块的第一端与所述主控芯片的第九端电连接,所述无线接收模块的第二端与无线发射模块的第一端电连接,所述无线发射模块的第二端与微控制器的第一端电连接,所述微控制器的第二端与可燃气体检测传感器电连接,所述微控制器的第三端与电磁阀电连接;
15.蜂鸣器,所述蜂鸣器与所述主控芯片的第十端电连接;
16.wifi模块,所述wifi模块与所述主控芯片的第十一端电连接。
17.本发明的实施例还提供了一种热气球飞行导航、状态监测和预警的方法,包括:
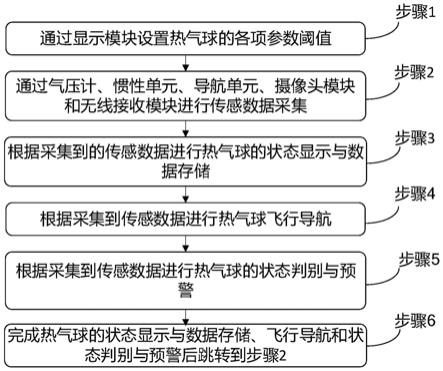
18.步骤1,通过显示模块设置热气球的各项参数阈值;
19.步骤2,通过气压计、惯性单元、导航单元、摄像头模块和无线接收模块进行传感数据采集;
20.步骤3,根据采集到的传感数据进行热气球的状态显示与数据存储;
21.步骤4,根据采集到的传感数据进行热气球飞行导航;
22.步骤5,根据采集到的传感数据进行热气球的状态判别与预警,
23.步骤6,完成热气球的状态显示与数据存储、飞行导航和状态判别与预警后跳转到步骤2。
24.其中,所述步骤2具体包括:
25.步骤21,通过可燃气体检测传感器获取气体溶度值并输入微控制器,微控制器将输入的气体溶度值发送到无线发射模块,无线发射模块将气体溶度值发送到无线接收模块,无线接收模块将气体溶度值输入主控芯片;
26.步骤22,通过导航单元获取热气球实时位置、世界标准时间和热气球水平速度并输入主控芯片;
27.步骤23,通过气压计获取热气球的实时高度并输入主控芯片;
28.步骤24,通过惯性单元获取热气球的加速度、热气球的姿态和热气球的航向并输入主控芯片;
29.步骤25,通过摄像头模块获取热气球监测的视频数据输入主控芯片,主控芯片对视频数据进行处理后获得热气球上的实际搭载人数。
30.其中,所述步骤3具体包括:
31.步骤31,通过显示模块显示热气球的飞行状态,通过数据存储模块存储热气球的飞行数据和视频数据。
32.其中,所述步骤4具体包括:
33.步骤41,通过显示模块在主控芯片中设置热气球飞行任务航线或热气球目标飞行点;
34.步骤42,获取热气球的水平速度、热气球的当前位置和热气球的当前航向;
35.步骤43,根据热气球的水平速度、热气球的当前位置和热气球的当前航向计算热气球从热气球的当前位置到设置的热气球目标飞行点间的目标距离和热气球的预计飞行时间;
36.步骤44,通过显示模块显示热气球的飞行轨迹、热气球当前航向、所述目标距离和热气球的预计飞行时间,显示模块显示热气球的飞行轨迹、热气球当前航向、所述目标距离和热气球的预计飞行时间后跳转到步骤42。
37.其中,所述步骤5具体包括:
38.步骤51,通过显示模块在主控芯片中设置气体溶度阈值a1、垂直速度数据阈值b1、水平速度数据阈值c1、最大搭载人数阈值d1、姿态横滚阈值e1和仰俯阈值f1;
39.步骤52,获取实时的气体溶度阈值a2、垂直速度数据阈值b2、水平速度数据阈值c2、最大搭载人数阈值d2、姿态横滚阈值e2和仰俯阈值f2;
40.步骤53,当实时的气体溶度阈值a2大于设置的气体溶度阈值a1时或当实时的垂直速度数据阈值b2大于设置的垂直速度数据阈值b1时或当实时的水平速度数据阈值c2大于设置的水平速度数据阈值c1时或当实时的最大搭载人数阈值d2大于设置的最大搭载人数阈值d1时或当实时的姿态横滚阈值e2大于设置的姿态横滚阈值e1时或当实时的仰俯阈值f2大于设置的仰俯阈值f1时,蜂鸣器报警,显示模块显示热气球相关状态异常,跳转到步骤52;
41.步骤54,当实时的气体溶度阈值a2小于设置的气体溶度阈值a1时或当实时的垂直速度数据阈值b2小于设置的垂直速度数据阈值b1时或当实时的水平速度数据阈值c2小于设置的水平速度数据阈值c1时或当实时的最大搭载人数阈值d2小于设置的最大搭载人数阈值d1时或当实时的姿态横滚阈值e2小于设置的姿态横滚阈值e1时或当实时的仰俯阈值f2小于设置的仰俯阈值f1时,热气球运行状态正常,跳转到步骤52。
42.本发明的上述方案有如下的有益效果:
43.本发明的上述实施例所述的热气球飞行导航、状态监测和预警的系统及方法,将热气球飞行导航、预警、飞行检测集成于一体,为热气球飞行员其提供飞行参数、即时气象信息、热气飞行状态等数据信息,为乘客提供更为安全的飞行环境;若飞行过程中出现意外,存储的飞行数据与视频数据可为事故发生的原因提供依据。
附图说明
44.图1为本发明的流程图;
45.图2为本发明的结构框图;
46.图3为本发明的热气球飞行导航、状态监测和预警的整体运行流程图;
47.图4为本发明的数据采集流程图;
48.图5为本发明的状态显示与数据存储流程图;
49.图6为本发明的飞行导航流程图;
50.图7为本发明的状态判别与预警流程图。
51.【附图标记说明】
52.1-主控芯片;2-wifi模块;3-4g通信模块;4-气压计;5-惯性单元;6-电池模块;7-导航单元;8-数据存储模块;9-显示模块;10-蜂鸣器;11-无线接收模块;12-无线发射模块;13-微控制器;14-可燃气体检测传感器;15-电磁阀;16-摄像头模块。
具体实施方式
53.为使本发明要解决的技术问题、技术方案和优点更加清楚,下面将结合附图及具体实施例进行详细描述。
54.本发明针对现有的无法对热气球运行时进行飞行导航和无法对热气球的状态进行监测和预警的问题,提供了一种热气球飞行导航、状态监测和预警的系统及方法。
55.如图1至图7所示,本发明的实施例提供了一种热气球飞行导航、状态监测和预警的系统,包括:主控芯片1;4g通信模块3,所述4g通信模块3与所述主控芯片1的第一端电连接;气压计4,所述气压计4与所述主控芯片1的第二端电连接;惯性单元5,所述惯性单元5与所述主控芯片1的第三端电连接;电池模块6,所述电池模块6与所述主控芯片1的第四端电连接;导航单元7,所述导航单元7与所述主控芯片1的第五端电连接;数据存储模块8,所述数据存储模块8与所述主控芯片1的第六端电连接;摄像头模块16,所述摄像头模块16与所述主控芯片1的第七端电连接;显示模块9,所述显示模块9与所述主控芯片1的第八端电连接;无线接收模块11,所述无线接收模块11的第一端与所述主控芯片1的第九端电连接,所述无线接收模块11的第二端与无线发射模块12的第一端电连接,所述无线发射模块12的第二端与微控制器13的第一端电连接,所述微控制器13的第二端与可燃气体检测传感器14电
连接,所述微控制器13的第三端与电磁阀15电连接;蜂鸣器10,所述蜂鸣器10与所述主控芯片1的第十端电连接;wifi模块2,所述wifi模块2与所述主控芯片1的第十一端电连接。
56.本发明的上述实施例所述的热气球飞行导航、状态监测和预警的系统及方法,所述可燃气体检测传感器14用于检测气体可燃气体的溶度,以判断气体是否泄漏,可燃气体一般为液化气;所述可燃气体检测传感器14布置于所需检测的位置,位置一般位于气体能量存储罐附近;所述可燃气体检测传感器14电性连接于所述主控芯片1,所述可燃气体检测传感器14有正极、负极供电以及模拟输出三个引脚,所述主控芯片1通过adc采样获取模拟输出电压,并计算当前电压下对应的气体溶度值;所述摄像头模块16用于监控热气球吊篮状态,基于所述摄像头模块16的视频数据,识别吊篮中的人数,可用于人数超载时报警;所述wifi模块2用于联入互联网,所述4g通信模块3用于连接到网络,电性接口是:minipcie接口;所述导航单元7用于获取北斗或gps等定位信息,移动速度(水平速度),世界标准时间等;所述气压计4用于获取当前海拔高度;所述惯性单元5用于获取三轴姿态(横滚\俯仰\偏航)角,三轴加速度(x,y,z)数据,以及三轴磁力计,用于融合实时的加速度与高度数据,得到较为精准的垂直方向速度值;所述主控芯片1可直接控制所述电磁阀15,进而控制气体能量存储罐阀门通断;所述热气球飞行导航、状态监测和预警的系统可搭建linux操作系统,可运行人机交互的操作应用软件,所述显示模块9是电容触摸屏,可显示状态数据,又可设置有关参数;具体实现以下内容交互:1.显示电子地图及其飞行轨迹;2.显示飞行数据,如海拔、水平速度、垂直速度、姿态、气体溶度值等;3.显示吊篮摄像状态;4.显示即时气象信息;5.设置系统参数,如飞行任务航线、气体溶度阈值和最大搭载人数阈值等;控制所述可燃气体检测传感器14、所述电磁阀15、和所述蜂鸣器10工作等;所述电池模块6用于整个给整个系统供电;所述数据存储模块8采用sd卡或tf卡,用于存储热气球飞行数据与吊篮监控视频。
57.本发明的实施例还提供了一种热气球飞行导航、状态监测和预警的方法,包括:步骤1,通过显示模块设置热气球的各项参数阈值;步骤2,通过气压计、惯性单元、导航单元、摄像头模块和无线接收模块进行传感数据采集;步骤3,根据采集到的传感数据进行热气球的状态显示与数据存储;步骤4,根据采集到的传感数据进行热气球飞行导航;步骤5,根据采集到的传感数据进行热气球的状态判别与预警,步骤6,完成热气球的状态显示与数据存储、飞行导航和状态判别与预警后跳转到步骤2。
58.本发明的上述实施例所述的热气球飞行导航、状态监测和预警的系统及方法,通过显示模块9实时显示电子地图、热气球飞行轨迹、热气球的飞行数据、热气球吊篮摄像状态和气象信息,其中,热气球的飞行数据包括海拔、水平速度、垂直速度、姿态和气体溶度值。
59.其中,所述步骤2具体包括:步骤21,通过可燃气体检测传感器获取气体溶度值并输入微控制器,微控制器将输入的气体溶度值发送到无线发射模块,无线发射模块将气体溶度值发送到无线接收模块,无线接收模块将气体溶度值输入主控芯片;步骤22,通过导航单元获取热气球实时位置、世界标准时间和热气球水平速度并输入主控芯片;步骤23,通过气压计获取热气球的实时高度并输入主控芯片;步骤24,通过惯性单元获取热气球的加速度、热气球的姿态和热气球的航向并输入主控芯片;步骤25,通过摄像头模块获取热气球监测的视频数据输入主控芯片,主控芯片对视频数据进行处理后获得热气球上的实际搭载人
数。
60.其中,所述步骤3具体包括:步骤31,通过显示模块显示热气球的飞行状态,通过数据存储模块存储热气球的飞行数据和视频数据。
61.其中,所述步骤4具体包括:步骤41,通过显示模块在主控芯片中设置热气球飞行任务航线或热气球目标飞行点;步骤42,获取热气球的水平速度、热气球的当前位置和热气球的当前航向;步骤43,根据热气球的水平速度、热气球的当前位置和热气球的当前航向计算热气球从热气球的当前位置到设置的热气球目标飞行点间的目标距离和热气球的预计飞行时间;步骤44,通过显示模块显示热气球的飞行轨迹、热气球当前航向、所述目标距离和热气球的预计飞行时间,显示模块显示热气球的飞行轨迹、热气球当前航向、所述目标距离和热气球的预计飞行时间后跳转到步骤42。
62.其中,所述步骤5具体包括:步骤51,通过显示模块在主控芯片中设置气体溶度阈值a1、垂直速度数据阈值b1、水平速度数据阈值c1、最大搭载人数阈值d1、姿态横滚阈值e1和仰俯阈值f1;步骤52,获取实时的气体溶度阈值a2、垂直速度数据阈值b2、水平速度数据阈值c2、最大搭载人数阈值d2、姿态横滚阈值e2和仰俯阈值f2;步骤53,当实时的气体溶度阈值a2大于设置的气体溶度阈值a1时或当实时的垂直速度数据阈值b2大于设置的垂直速度数据阈值b1时或当实时的水平速度数据阈值c2大于设置的水平速度数据阈值c1时或当实时的最大搭载人数阈值d2大于设置的最大搭载人数阈值d1时或当实时的姿态横滚阈值e2大于设置的姿态横滚阈值e1时或当实时的仰俯阈值f2大于设置的仰俯阈值f1时,蜂鸣器报警,显示模块显示热气球相关状态异常,跳转到步骤52;步骤54,当实时的气体溶度阈值a2小于设置的气体溶度阈值a1时或当实时的垂直速度数据阈值b2小于设置的垂直速度数据阈值b1时或当实时的水平速度数据阈值c2小于设置的水平速度数据阈值c1时或当实时的最大搭载人数阈值d2小于设置的最大搭载人数阈值d1时或当实时的姿态横滚阈值e2小于设置的姿态横滚阈值e1时或当实时的仰俯阈值f2小于设置的仰俯阈值f1时,热气球运行状态正常,跳转到步骤52。
63.本发明的上述实施例所述的热气球飞行导航、状态监测和预警的系统及方法,进行飞行导航:1.通过应用软件,提前规划好目标路径;2.导航单元7获取实时定位数据,并显示在电子地图;3.显示飞行路径。进行状态监测:1.飞行数据状态监测,如海拔、水平速度、垂直速度、姿态;2.气体溶度值监测;3.视频数据监测。预警:气体溶度值过高预警、人数超载预警、垂直速度过快预警、水平速度过快预警;
64.本发明的上述实施例所述的热气球飞行导航、状态监测和预警的系统及方法,将热气球飞行导航、预警、飞行检测集成于一体;预警系统涵盖:人数超载、气体溶度过高、速度过快等方面,为热气球飞行员其提供飞行参数、即时气象信息、热气飞行状态等数据信息,为乘客提供更为安全的飞行环境;若飞行过程中出现意外,存储的飞行数据与视频数据可为事故发生的原因提供依据。
65.以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明所述原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1