一种四足仿生机器人在电力巡检的应用系统的制作方法
1.本发明涉及电力巡查技术领域,尤其涉及一种四足仿生机器人在电力巡检的应用系统。
背景技术:
2.变电站设备巡检是有效保证变电站内设备安全运行,提高供电可靠性的一项基础性工作,它分为例行巡检和特殊巡检。其中,例行巡检每天至少两次;特殊巡检一般在高温天气、大负荷运行、新投入设备运行前以及大风、雾天、冰雪、冰雹、雷雨后进行。
3.我国地域辽阔,很多变电站的地理环境十分恶劣(如高海拔、酷热、极寒、大风、沙尘、多雨等),大多数变电站巡检方式多为人工巡检,主要是通过手持红外热像仪对变电站设备进行红外测温。而只靠人工在室外进行长时间的设备巡检工作是十分困难的,同时也存在劳动强度大、工作效率低、检测质量分散等不足,因此需要借助机器人来辅助检测,但是现有的机器人设备通常都是采用轮式机器人,行走的路线必须为平坦的道路,不适用于多种地形,另外现有的机器人在得到指令后不易进行切换指令,必须完成前述指令,降低了实用性,而且机器人与人之间缺少交互的系统。
4.为此,我们提出一种四足仿生机器人在电力巡检的应用系统来解决上述问题。
技术实现要素:
5.本发明的目的是为了解决现有技术中存在的缺点,而提出的一种四足仿生机器人在电力巡检的应用系统。
6.为了实现上述目的,本发明采用了如下技术方案:
7.一种四足仿生机器人在电力巡检的应用系统,包括基站控制系统层和移动系统层;所述基站控制系统层包括无线网桥和上位计算机;所述移动系统层包括多个四足机器人以及设置于所述四足机器人内的电源模块、导航模块、检测模块、控制模块、通信模块和运动模块,所述基站控制系统层与移动系统层之间通过5g无线网络连接,所述四足机器人将被检测设备的视频、声音和测温数据通过无线网络传输到上位计算机中并实现被控设备状态的自动校核。
8.在上述的四足仿生机器人在电力巡检的应用系统中,所述上位计算机与多个四足机器人通过通信模块连接,所述四足机器人内的控制模块用于接收所述上位计算机发送的巡检指令,所述控制模块分别与电源模块、导航模块、检测模块、通信模块和运动模块连接。
9.在上述的四足仿生机器人在电力巡检的应用系统中,所述电源模块采用接触式充电方式与变电站电源连接,所述四足机器人完成巡检任务后自动连接充电。
10.在上述的四足仿生机器人在电力巡检的应用系统中,所述导航模块按照上位计算机预先设定好的巡视路线自动完成巡视任务并在预设点自动定位,所述预设点包括无线射频识别点、巡视相关设备、仪表和接头。
11.在上述的四足仿生机器人在电力巡检的应用系统中,所述检测模块内设置有光图
像采集单元、红外图像采集单元、温度采集单元和湿度采集单元。
12.在上述的四足仿生机器人在电力巡检的应用系统中,所述四足机器人中设置有人机交互系统,所述人机交互系统包括检查连接状态、手动巡检、视频录制和回放以及任务定时下发配置,所述检查连接状态是前置要求以确定四足机器人的使用状态;所述手动巡检通过点击四足机器人内的控制平台按钮进入可切换模式变成“手动控制模式”;所述视频录制和回放通过点击控制平台内的“开始录像”并在录制完成后会显示存储路径;所述任务定时下发配置通过点击控制平台内的“启动定时任务”选择定时,选择完成后会再次确认下发配置并按照设定执行。
13.在上述的四足仿生机器人在电力巡检的应用系统中,所述运动模块内设置有光电检测单元并用于检测预定轨道上的障碍信息,所述四足机器人内还设有报警模块,且四足机器人在巡视过程中遇到障碍物自动停下并进行报警。
14.在上述的四足仿生机器人在电力巡检的应用系统中,所述四足机器人内设置有重启模块,所述重启模块与控制模块连接并用于任务切换使用,终止前一个任务并执行新设定的任务,所述四足机器人内设置有内置存储模块并用于数据的离线存储。
15.与现有技术相比,本一种四足仿生机器人在电力巡检的应用系统的优点在于:
16.1、本发明选用四足机器人作为电力巡检的主体单位,可以适用于不同的地形,即实现了机器人的爬梯,取代传统的轮式机器人仅能进行平面轨道的巡检。
17.2、本发明的四足机器人内设置有重启模块,重启模块与控制模块连接并用于任务切换使用,终止前一个任务并执行新设定的任务,四足机器人内设置有内置存储模块并用于数据的离线存储,解决了现有使用中巡查机器人不能立即主动切换任务的情况,并且前一个任务的检测数据能够进行离线存储,避免数据的丢失。
18.3、本发明的四足机器人中设置有人机交互系统,可以实现四足机器人与操作人员之间的互动,并且可以相应的切换至手动操作模式,提高了适用性。
附图说明
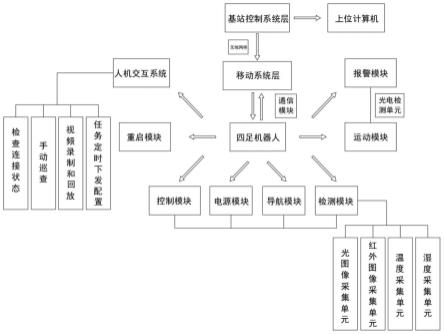
19.图1为本发明提出的一种四足仿生机器人在电力巡检的应用系统的系统结构图;
20.图2为本发明提出的一种四足仿生机器人在电力巡检的应用系统的系统框图;
21.图中,100基站控制系统层、101无线网桥、102上位计算机、200移动系统层、201四足机器人、202电源模块、203导航模块、204检测模块、204a光图像采集单元、204b红外图像采集单元、204c温度采集单元、204d湿度采集单元、205控制模块、206通信模块、207运动模块、207a光电检测单元、207b报警模块、300人机交互系统、301检查连接状态、302手动巡查、303视频录制和回放、304任务定时下发配置、400重启模块。
具体实施方式
22.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
23.实施例
24.参照图1-2,一种四足仿生机器人在电力巡检的应用系统,包括基站控制系统层100和移动系统层200;基站控制系统100层包括无线网桥101和上位计算机102;移动系统层
200包括多个四足机器人201以及设置于四足机器人201内的电源模块202、导航模块203、检测模块204、控制模块205、通信模块206和运动模块207,选用四足机器人作为电力巡检的主体单位,可以适用于不同的地形,即实现了机器人的爬梯,取代传统的轮式机器人仅能进行平面轨道的巡检,上位计算机102与多个四足机器人201通过通信模块206连接,四足机器人201内的控制模块205用于接收上位计算机102发送的巡检指令,控制模块205分别与电源模块202、导航模块203、检测模块204、通信模块206和运动模块207连接。
25.进一步的,基站控制系统层100与移动系统层200之间通过5g无线网络连接,四足机器人201将被检测设备的视频、声音和测温数据通过无线网络传输到上位计算机102中并实现被控设备状态的自动校核,具体的,上位计算机能够自动采集和存储可见光图像和红外图像并进行分析和处理;动态显示机器人当前采集的可见光图像和红外图像;实时显示机器人当前的方位、运动状态和电源状态并进行分析。
26.其中,电源模块202采用接触式充电方式与变电站电源连接,四足机器人201完成巡检任务后自动连接充电,保证四足机器人使用的稳定性,采用自动连接充电的方式能够提高自动化程度。
27.其中,导航模块203按照上位计算机102预先设定好的巡视路线自动完成巡视任务并在预设点自动定位,预设点包括无线射频识别点、巡视相关设备、仪表和接头,具体的,依据现场情况为四足机器人201安排合理的巡视时间及运行任务、路线,例如单日对220kv及35kv设备区进行时长1h的可见光巡视及时长2h的红外成像巡视;双日对主变、500kv设备区进行时长2h可见光及时长3h的红外成像巡视,巡检任务结束后,通过筛选巡视时间及设备类型分析设备温度,并显示模式识别区域的温度。
28.其中,检测模块204内设置有光图像采集单元204a、红外图像采集单元204b、温度采集单元204c和湿度采集单元204d,通过设置光图像采集单元204a、红外图像采集单元204b、温度采集单元204c和湿度采集单元204d能够相应的对光图像、红外图像、温度和湿度进行采集和检测。
29.进一步的,四足机器人201中设置有人机交互系统300,人机交互系统300包括检查连接状态301、手动巡检302、视频录制和回放303以及任务定时下发配置304,检查连接状态301是前置要求以确定四足机器人201的使用状态;手动巡检302通过点击四足机器人201内的控制平台按钮进入可切换模式变成“手动控制模式”;视频录制和回放303通过点击控制平台内的“开始录像”并在录制完成后会显示存储路径;任务定时下发配置304通过点击控制平台内的“启动定时任务”选择定时,选择完成后会再次确认下发配置并按照设定执行,通过设置人机交互系统300,可以实现四足机器人与操作人员之间的互动,并且可以相应的切换至手动操作模式,提高了适用性。
30.其中,运动模块207内设置有光电检测单元207a并用于检测预定轨道上的障碍信息,四足机器人201内还设有报警模块207b,且四足机器人201在巡视过程中遇到障碍物自动停下并进行报警,避免四足机器人201出现损坏的情况。
31.具体的,四足机器人201内设置有重启模块400,重启模块400与控制模块205连接并用于任务切换使用,终止前一个任务并执行新设定的任务,四足机器人201内设置有内置存储模块并用于数据的离线存储,解决了现有使用中巡查机器人不能立即主动切换任务的情况,并且前一个任务的检测数据能够进行离线存储,避免数据的丢失。
32.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1