一种基于5G通讯的智能巡检维护方法与流程
一种基于5g通讯的智能巡检维护方法
技术领域
1.本发明涉及一种基于5g通讯的智能巡检维护方法。
背景技术:
2.随着城市轨道交通智能车载轨道高速巡检系统的出现,不但改变了国内城市轨道交通巡检主要依靠人力的现状,且大大提高检测速度及检测精度,提升运营的智能化水平,保障城市轨道交通运行安全。
3.但目前的轨道智能巡检维护方式较少,维护方案可选择性较少,智能化存在着不足,且自动化程度较少,不便于远程实时控制和自动维护。
技术实现要素:
4.针对现有技术中的不足,本发明的目的是提供一种自动化程度高,便于远程实时控制和自动维护的基于5g通讯的智能巡检维护方法。
5.本发明解决其技术问题所采用的技术方案是:
6.一种基于5g通讯的智能巡检维护方法,包括以下步骤:
7.在巡检服务器中进行巡检目标、巡检项目和巡检时间的设置;
8.在巡检终端中进行巡检表单的生成和保存,并基于生成的巡检表单向巡检机器人发送巡检指令;
9.巡检服务器基于巡检目标的位置信息生成巡检路线,并基于生成的巡检路线与巡检项目和巡检时间,生成巡检计划;
10.巡检机器人对巡检项目进行识别算法训练,获取特征数据,并根据特征数据生成预设图像;
11.巡检机器人基于巡检计划进行巡检作业,并生成巡检图像,将该巡检图像与预设图像中所识别的特定部位进行比对;
12.基于比对结果进行维护作业,并在维护作业完成后采集维护后的维护图像进行保存,生成巡检历史记录,继续进行巡检计划直至完成巡检作业。
13.作为优选,巡检目标的设置方法为:包括站点目标和轨道目标,其中站点目标为单独设备的巡检,轨道目标为路程路段的巡检,在巡检服务器中进行巡检地图的导入,并基于巡检地图,针对站点目标和轨道目标生成可选择的特征点或特征线路,基于选择的特征点或特征线路作为巡检目标。
14.作为优选,巡检项目的设置方法为:包括障碍检测、磨损检测和位置检测,其中障碍检测为检测轨道目标中的特定特征区域中是否存在障碍物,磨损检测为站点目标或轨道目标中特定特征区域中是否存在磨损情况,位置检测为站点目标中特征目标的位置坐标是否存在偏移。
15.作为优选,巡检时间的设置方法为:包括路程时间和停留时间,其中路程时间为经过目标路程或到达站点目标的时间,停留时间为在站点目标的停机时间。
16.作为优选,基于巡检目标的位置信息生成巡检路线的方法为:进行第一出发点的设置,以最为接近第一出发点的站点目标或轨道目标作为第一行进路线,以该第一行进路线的终点位置作为第二出发点,以最为接近第二出发点的站点目标或轨道目标作为第二行进路线,直至生成整个巡检路线。
17.作为优选,生成巡检计划的方法为:获取第一行进路线,基于巡检表单进行第一行进路线与巡检项目和巡检时间的关联,得到第一阶段巡检计划,获取第二行进路线,基于巡检表单进行第二行进路线与巡检项目和巡检时间的关联,得到第二阶段巡检计划,直至生成整个巡检计划。
18.作为优选,当出现维护请求时,则进行巡检计划的暂停,并发送故障警报,同时按照预设的维护程序进行故障的自动维护,并进行全程的故障维护视频的数据传输,当维护作业完成后,则进行巡检计划的继续。
19.作为优选,根据特征数据生成预设图像的方法为:对轨道目标进行标记,同时沿标记的轨道目标进行多次轨道图像数据的采集,获取轨道部位的训练图像进行分析,并提取轨道部位的特征信息,基于特征信息对训练图像的特征点进行标记得到特征数据,基于该特征数据生成预设图像。
20.作为优选,根据特征数据生成预设图像的方法为:对站点目标进行标记,同时对站点目标进行多次特定部位的图像数据的采集,获取特定部位的训练图像进行分析,并提取特定部位的特征信息,基于特征信息对训练图像的特征点进行标记得到特征数据,基于该特征数据生成预设图像。
21.作为优选,基于比对结果进行维护作业的方法为:基于站点或轨道的障碍检测结果、磨损检测结果或位置检测结果判断是否进行维护,当站点或轨道检测出现障碍时,则控制巡检机器人进行障碍的排除,包括向内排除和向外排除,当站点或轨道检测出现磨损时,基于磨损程度进行远程报警检修或涂油形成油膜保护,当站点或轨道检测处位置偏移时,则进行远程报警检修。
22.本发明的有益效果是:
23.使用者只需要在预存的地图中选择对应的巡检目标、巡检项目和巡检时间,巡检服务器即可根据巡检目标自动生成巡检路线,并巡检路线中各个巡检目标所对应的巡检项目和巡检时间生成巡检计划,接着通过巡检机器人进行巡检作业,巡检机器人基于机械视觉技术对设置的轨道或站点进行巡检作业,并基于巡检作业的结果进行自动作业或发送警报通过远程操控进行实时维护作业。
附图说明
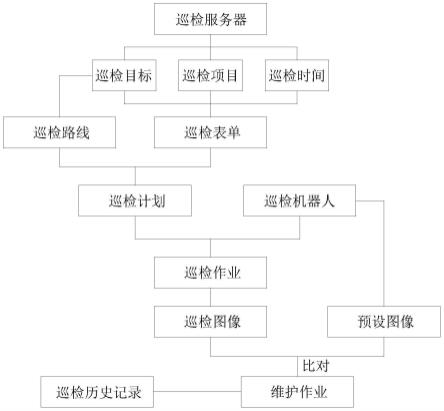
24.图1为本发明的一种基于5g通讯的智能巡检维护方法的流程示意图。
具体实施方式
25.以下结合附图对本发明的原理和特征进行描述,所举实例只用于解释本发明,并非用于限定本发明的范围。在下列段落中参照附图以举例方式更具体地描述本发明。根据下面说明和权利要求书,本发明的优点和特征将更清楚。需说明的是,附图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本发明实施例的目的。
26.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
27.实施例
28.参阅图1所示,一种基于5g通讯的智能巡检维护方法,包括以下步骤:
29.在巡检服务器中进行巡检目标、巡检项目和巡检时间的设置;
30.在巡检终端中进行巡检表单的生成和保存,并基于生成的巡检表单向巡检机器人发送巡检指令;
31.巡检服务器基于巡检目标的位置信息生成巡检路线,并基于生成的巡检路线与巡检项目和巡检时间,生成巡检计划;
32.巡检机器人对巡检项目进行识别算法训练,获取特征数据,并根据特征数据生成预设图像;
33.巡检机器人基于巡检计划进行巡检作业,并生成巡检图像,将该巡检图像与预设图像中所识别的特定部位进行比对;
34.基于比对结果进行维护作业,并在维护作业完成后采集维护后的维护图像进行保存,生成巡检历史记录,继续进行巡检计划直至完成巡检作业。
35.巡检目标的设置方法为:包括站点目标和轨道目标,其中站点目标为单独设备的巡检,轨道目标为路程路段的巡检,在巡检服务器中进行巡检地图的导入,并基于巡检地图,针对站点目标和轨道目标生成可选择的特征点或特征线路,基于选择的特征点或特征线路作为巡检目标,需要说明的是,该站点目标即为各个轨道的分叉节点位置,或者各个轨道的停靠站点位置。
36.巡检项目的设置方法为:包括障碍检测、磨损检测和位置检测,其中障碍检测为检测轨道目标中的特定特征区域中是否存在障碍物,磨损检测为站点目标或轨道目标中特定特征区域中是否存在磨损情况,位置检测为站点目标中特征目标的位置坐标是否存在偏移,其中,障碍检测为轨道上对轨道图像形成遮挡或阻挡的物体,磨损检测为轨道上划痕、裂痕、摩擦纹等对轨道图像形成破坏的损伤,位置检测为轨道的扭曲、沉降等情况对轨道图像形成的破坏。
37.巡检时间的设置方法为:包括路程时间和停留时间,其中路程时间为经过目标路程或到达站点目标的时间,停留时间为在站点目标的停机时间。
38.基于巡检目标的位置信息生成巡检路线的方法为:进行第一出发点的设置,以最为接近第一出发点的站点目标或轨道目标作为第一行进路线,以该第一行进路线的终点位置作为第二出发点,以最为接近第二出发点的站点目标或轨道目标作为第二行进路线,直至生成整个巡检路线。
39.生成巡检计划的方法为:获取第一行进路线,基于巡检表单进行第一行进路线与巡检项目和巡检时间的关联,得到第一阶段巡检计划,获取第二行进路线,基于巡检表单进行第二行进路线与巡检项目和巡检时间的关联,得到第二阶段巡检计划,直至生成整个巡检计划。
40.当出现维护请求时,则进行巡检计划的暂停,并发送故障警报,同时按照预设的维
护程序进行故障的自动维护,并进行全程的故障维护视频的数据传输,当维护作业完成后,则进行巡检计划的继续。
41.根据特征数据生成预设图像的方法为:对轨道目标进行标记,同时沿标记的轨道目标进行多次轨道图像数据的采集,获取轨道部位的训练图像进行分析,并提取轨道部位的特征信息,基于特征信息对训练图像的特征点进行标记得到特征数据,基于该特征数据生成预设图像。
42.根据特征数据生成预设图像的方法为:对站点目标进行标记,同时对站点目标进行多次特定部位的图像数据的采集,获取特定部位的训练图像进行分析,并提取特定部位的特征信息,基于特征信息对训练图像的特征点进行标记得到特征数据,基于该特征数据生成预设图像。
43.基于比对结果进行维护作业的方法为:基于站点或轨道的障碍检测结果、磨损检测结果或位置检测结果判断是否进行维护,当站点或轨道检测出现障碍时,则控制巡检机器人进行障碍的排除,包括向内排除和向外排除,当站点或轨道检测出现磨损时,基于磨损程度进行远程报警检修或涂油形成油膜保护,当站点或轨道检测处位置偏移时,则进行远程报警检修。
44.本发明的有益效果是:
45.使用者只需要在预存的地图中选择对应的巡检目标、巡检项目和巡检时间,巡检服务器即可根据巡检目标自动生成巡检路线,并巡检路线中各个巡检目标所对应的巡检项目和巡检时间生成巡检计划,接着通过巡检机器人进行巡检作业,巡检机器人基于机械视觉技术对设置的轨道或站点进行巡检作业,并基于巡检作业的结果进行自动作业或发送警报通过远程操控进行实时维护作业。
46.本发明的上述实施例并不是对本发明保护范围的限定,本发明的实施方式不限于此,凡此种种根据本发明的上述内容,按照本领域的普通技术知识和惯用手段,在不脱离本发明上述基本技术思想前提下,对本发明上述结构做出的其它多种形式的修改、替换或变更,均应落在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1