地上物数据收集装置、地上物数据收集方法以及地上物数据收集用计算机程序与流程
1.本发明涉及收集地图所呈现的地上物的数据的地上物数据收集装置、地上物数据收集方法以及地上物数据收集用计算机程序。
背景技术:
2.在车辆的自动驾驶系统为了对车辆进行自动驾驶控制而参照的高精度的地图中,要求准确地呈现与设置于道路或者道路周围的与车辆的行驶关联的地上物有关的信息。因而,从实际地在道路上行驶的车辆收集表示地上物的数据。提出了在该收集时,抑制车辆与收集表示地上物的数据的装置之间的通信负荷的技术(参照国际公开第2018/180097号)。
3.在国际公开第2018/180097号所公开的技术中,服务器装置从能够进行基于第1移动体的周边状态和地图的自动驾驶的第1移动体接收表示自动驾驶的状况的信息。然后,服务器装置向能够发送表示第1移动体移动的场所的状态的状态信息的第2移动体发送状态信息的请求,在接收到的状况信息表示能够进行自动驾驶的情况下,抑制请求的发送。
技术实现要素:
4.为了更新地图以能确保地图所呈现的各地上物的位置的准确性,希望针对每个地上物,收集一定数量以上的表示该地上物的数据。但是,由于每个场所的车辆的通行频度或者收集环境等的影响,有时针对每个地上物,表示该地上物的数据的收集速度不同。另外,表示地上物的数据所包含的该地上物的位置的精度不为恒定,所以直至得到足够的位置的精度为止所需的表示地上物的数据的数量有时针对每个地上物而不同。因此,难以针对各地上物适当地设定结束表示该地上物的数据的收集的定时。
5.因而,本发明的目的在于提供能够针对每个地上物适当地设定停止收集表示该地上物的数据的定时的地上物数据收集装置。
6.根据一个实施方式,提供地上物数据收集装置。该地上物数据收集装置具有:存储部,关于与车辆的行驶关联的地上物,存储地图信息,该地图信息包含针对每个位置表示在该位置处存在地上物的可靠度的概率分布;接收处理部,每当从一台以上的车辆中的任意车辆经由能够与该车辆进行通信的通信部接收到表示地上物的位置的地上物数据时,将接收到的地上物数据存储于存储部;更新部,根据接收到的一个以上的地上物数据各自所表示的地上物的位置,更新表示每个位置存在地上物的可靠度的概率分布;以及收集停止指示部,在更新后的概率分布的扩展程度为预定的阈值以下的情况下,经由通信部对一台以上的车辆发送停止收集地上物数据的指示。
7.在该地上物数据收集装置中,优选的是地上物数据还包含表示生成该地上物数据的车辆与该地上物数据所表示的地上物的位置之间的距离的信息,该距离越小,则更新部越增大该地上物数据针对概率分布的更新的贡献。
8.另外,在该地上物数据收集装置中,优选的是概率分布用正态分布表示,收集停止
指示部在关于更新后的概率分布中的任意方向的方差值也为预定的方差阈值以下的情况下,判定为更新后的概率分布的扩展程度为预定的阈值以下。
9.或者,在该地上物数据收集装置中,优选的是概率分布用正态分布表示,收集停止指示部在更新后的概率分布中的位置的平均值处的可靠度为预定的可靠度阈值以上的情况下,判定为更新后的概率分布的扩展程度为预定的阈值以下。
10.根据其它方式,提供地上物数据收集方法。该地上物数据收集方法包括:每当从一台以上的车辆中的任意车辆经由能够与该车辆进行通信的通信部接收到表示与车辆的行驶关联的地上物的位置的地上物数据时,将接收到的地上物数据存储于存储部,根据接收到的一个以上的地上物数据各自所表示的地上物的位置,更新地图信息所包含的针对每个位置而表示在该位置处存在地上物的可靠度的概率分布,在更新后的概率分布的扩展程度为预定的阈值以下的情况下,经由通信部对一台以上的车辆发送停止收集地上物数据的指示。
11.进而,根据其它方式,提供地上物数据收集用计算机程序。该地上物数据收集用计算机程序包含用于使计算机执行如下步骤的命令:每当从一台以上的车辆中的任意车辆经由能够与该车辆进行通信的通信部接收到表示与车辆的行驶关联的地上物的位置的地上物数据时,将接收到的地上物数据存储于存储部,根据接收到的一个以上的地上物数据各自所表示的地上物的位置,更新地图信息所包含的针对每个位置而表示在该位置处存在地上物的可靠度的概率分布,在更新后的概率分布的扩展程度为预定的阈值以下的情况下,经由通信部对一台以上的车辆发送停止收集地上物数据的指示。
12.本发明的地上物数据收集装置起到能够针对每个地上物适当地设定停止收集表示该地上物的数据的定时这样的效果。
附图说明
13.图1是安装有地上物数据收集装置的地上物数据收集系统的概略结构图。
14.图2是车辆的概略结构图。
15.图3是数据获取装置的硬件结构图。
16.图4是作为地上物数据收集装置的一个例子的服务器的硬件结构图。
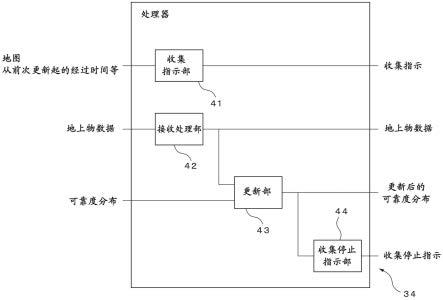
17.图5是与地上物数据收集处理有关的服务器的处理器的功能框图。
18.图6是表示关于地上物的位置的可靠度分布的示意图。
19.图7是地上物数据收集处理的动作流程图。
具体实施方式
20.以下,参照图,说明地上物数据收集装置以及由地上物数据收集装置执行的地上物数据收集方法及地上物数据收集用计算机程序。该地上物数据收集装置关于预定的区域从能够通信的一台以上的车辆收集表示与车辆的行驶关联的地上物的数据(以下,称为地上物数据)。
21.该地上物数据收集装置用针对每个位置表示在该位置处存在该地上物的可信度即可靠度的概率分布(以下,称为可靠度分布)来表示各地上物的位置。该地上物数据收集装置针对每个地上物,使用关于该地上物接收到的地上物数据所表示的地上物的位置来更
新关于该地上物的可靠度分布。然后,该地上物数据收集装置关于可靠度分布的扩展程度为预定的阈值以下的地上物,停止收集地上物数据。
22.此外,作为成为检测对象的地上物,例如包括各种道路标识、各种道路标示、信号灯以及与其它车辆的行驶关联的地上物。
23.图1是安装有地上物数据收集装置的地上物数据收集系统的概略结构图。在本实施方式中,地上物数据收集系统1具有至少一个车辆2和作为地上物数据收集装置的一个例子的服务器3。各车辆2例如通过访问无线基站5,从而经由无线基站5以及通信网络4而与服务器3连接,该无线基站5经由网关(未图示)等而与连接有服务器3通信网络4连接。此外,在图1中,为了简化,仅图示出一个车辆2,但地上物数据收集系统1也可以具有多个车辆2。同样地,在图1中,仅图示出一个无线基站5,但也可以是多个无线基站5连接于通信网络4。另外,服务器3也可以经由通信网络而与管理交通信息的交通信息服务器(未图示)能够通信地连接。
24.图2是车辆2的概略结构图。车辆2具有摄像机11、gps接收机12、无线通信终端13以及数据获取装置14。摄像机11、gps接收机12、无线通信终端13以及数据获取装置14经由遵循控制器局域网络这样的标准的车内网络能够通信地连接。另外,车辆2也可以还具有导航装置(未图示),该导航装置(未图示)探索车辆2的预定行驶路线,以使车辆2依照该预定行驶路线行驶的方式进行导航。
25.摄像机11是用于拍摄车辆2的周围的摄像部的一个例子,具有由ccd或者c-mos等对可见光具有灵敏度的光电变换元件的阵列构成的2维检测器和在该2维检测器上使作为拍摄对象的区域的像成像的成像光学系统。而且,摄像机11例如以朝着车辆2的前方的方式,例如安装于车辆2的车室内。而且,摄像机11每隔预定的拍摄周期(例如1/30秒~1/10秒)拍摄车辆2的前方区域,生成拍摄到该前方区域的图像。由摄像机11得到的图像既可以是彩色图像,或者也可以是灰度图像。此外,也可以在车辆2中,设置拍摄方向或者焦点距离不同的多个摄像机11。
26.摄像机11每当生成图像时,经由车内网络将该生成的图像输出到数据获取装置14。
27.gps接收机12每隔预定的周期接收来自gps卫星的gps信号,根据接收到的gps信号对车辆2的自身位置进行定位。然后,gps接收机12每隔预定的周期经由车内网络将表示基于gps信号的车辆2的自身位置的定位结果的定位信息输出到数据获取装置14。此外,车辆2也可以具有遵循gps接收机12以外的卫星定位系统的接收机。在该情况下,该接收机对车辆2的自身位置进行定位即可。
28.无线通信终端13是通信部的一个例子,是执行遵循预定的无线通信标准的无线通信处理的设备,例如通过访问无线基站5,从而经由无线基站5以及通信网络4而与服务器3连接。然后,无线通信终端13生成从数据获取装置14收取到的包含地上物数据等的上行链路的无线信号。然后,无线通信终端13通过将该上行链路的无线信号发送到无线基站5,从而将地上物数据以及行驶信息等发送到服务器3。另外,无线通信终端13从无线基站5接收下行链路的无线信号,将该无线信号所包含的来自服务器3的收集指示或者收集停止指示等交付给数据获取装置14或者控制车辆2的行驶的电子控制装置(ecu,未图示)。
29.图3是数据获取装置的硬件结构图。数据获取装置14根据由摄像机11生成的图像
来生成地上物数据。进而,数据获取装置14生成车辆2的行驶信息。为此,数据获取装置14具有通信接口21、存储器22以及处理器23。
30.通信接口21是车内通信部的一个例子,具有用于将数据获取装置14与车内网络连接的接口电路。即,通信接口21经由车内网络而与摄像机11、gps接收机12以及无线通信终端13连接。然后,通信接口21每当从摄像机11接收到图像时,将接收到的图像交付给处理器23。另外,通信接口21每当从gps接收机12接收到定位信息时,将接收到的定位信息交付给处理器23。进而,通信接口21将经由无线通信终端13从服务器3接收到的地上物数据的收集指示以及收集停止指示交付给处理器23。进而,通信接口21经由车内网络将从处理器23收取到的地上物数据输出到无线通信终端13。
31.存储器22例如具有易失性的半导体存储器以及非易失性的半导体存储器。存储器22也可以还具有硬盘装置这样的其它存储装置。然后,存储器22存储在由数据获取装置14的处理器23执行的与地上物数据生成关联的处理中使用的各种数据。在这样的数据中,例如包含道路地图、车辆2的识别信息、摄像机11的设置高度、拍摄方向以及视场角这样的摄像机11的参数以及用于确定用于从图像检测地上物的识别器的参数组等。此外,道路地图例如能够设为在导航装置中利用的地图,具有该道路地图所呈现的区域所包含的各道路区间的位置、长度、各个交叉路口处的道路区间的连接关系等信息。另外,存储器22也可以将从摄像机11接收到的图像以及从gps接收机12接收到的定位信息存储一定期间。进而,存储器22存储表示按照地上物数据的收集指示指定的作为地上物数据的生成以及收集对象的区域(以下,有时称为收集对象区域)的信息以及表示按照收集停止指示指定的停止收集地上物数据的区域(以下,有时称为收集停止区域)的信息。进而,另外存储器22也可以存储用于实现由处理器23执行的各处理的计算机程序等。
32.处理器23具有1个或者多个cpu(central processing unit,中央处理单元)及其周边电路。处理器23也可以还具有逻辑运算单元、数值运算单元或者图形处理单元这样的其它运算电路。然后,处理器23将从摄像机11接收到的图像、从gps接收机12接收到的定位信息存储于存储器22。进而,处理器23在车辆2行驶的期间每隔预定的周期(例如,0.1秒~10秒)执行与地上物数据生成关联的处理。
33.处理器23作为与地上物数据生成关联的处理,例如,判定用从gps接收机12接收到的定位信息表示的车辆2的本车位置是否包含于收集对象区域。然后,处理器23在本车位置包含于收集对象区域的情况下,根据从摄像机11接收到的图像来生成地上物数据。
34.例如,处理器23通过将从摄像机11接收到的图像输入到以检测作为检测对象的地上物的方式预先学习的识别器,从而检测所输入的图像(以下,有时简称为输入图像)所呈现的地上物。然后,处理器23生成表示检测出的地上物的种类的信息作为地上物数据。处理器23作为这样的识别器,例如能够使用以从输入图像检测该输入图像所呈现的地上物的方式预先学习的深度神经网络(dnn)。作为这样的dnn,例如使用单发多盒检测器(single shot multibox detector(ssd))或者faster r-cnn这样的具有卷积神经网络(cnn)型的架构的dnn。在该情况下,识别器在输入图像上的各种区域,针对作为检测对象的地上物的每个种类(例如,车道划分线、人行横道、临时停止线等),计算表示该地上物呈现于该区域的可信度的置信度。识别器判定为在关于任意种类的地上物的置信度为预定的检测阈值以上的区域呈现有该种类的地上物。然后,该识别器输出表示在输入图像上包括作为检测对
象的地上物的区域(例如,作为检测对象的地上物的外接矩形,以下,称为物体区域)的信息以及表示物体区域所呈现的地上物的种类的信息。因而,处理器23以包含表示检测到的物体区域所呈现的地上物的种类的信息的方式生成地上物数据即可。
35.进而,处理器23确定地上物数据所表示的地上物在实空间中的位置,使表示该位置的信息包含于地上物数据。在此,图像上的各像素的位置与从摄像机11向该像素所表示的物体的方位一对一地对应。因而,处理器23根据与从图像检测到的物体区域的重心对应的从摄像机11起的方位、生成用于生成地上物数据的图像时的车辆2的本车位置、行进方向以及摄像机11的拍摄方向、视场角以及设置高度这样的参数,推测该物体区域所呈现的地上物的位置。此时,处理器23能够将用在离用于生成地上物数据的图像的生成时最近的定时从gps接收机12接收到的定位信息表示的位置作为车辆2的本车位置。或者,在ecu(未图示)推测车辆2的本车位置的情况下,处理器23也可以经由通信接口21从ecu获取表示推测出的车辆2的本车位置的信息。进而,处理器23从ecu(未图示)获取表示车辆2的行进方向的信息即可。或者另外,处理器23也可以根据所谓的structure from motion(sfm)来推测地上物数据所表示的地上物的位置。在该情况下,处理器23在互不相同的定时得到的两个图像间利用光流将呈现有相同的地上物的物体区域彼此对应起来。然后,处理器23能够根据分别得到该两个图像时的车辆2的位置以及行进方向、摄像机11的参数以及各图像中的物体区域的位置,通过三角测量来推测地上物的位置。
36.处理器23使表示地上物数据所表示的地上物的位置的纬度以及经度作为表示地上物数据所表示的地上物的位置的信息而包含于地上物数据。进而,处理器23参照道路地图,确定作为包括地上物数据所表示的地上物的位置或者离该位置最近的道路区间的路段。然后,处理器23使所确定的路段的识别编号包含于地上物数据。
37.处理器23进而也可以在地上物数据中包含车辆2的识别信息。另外,处理器23也可以在地上物数据中包含用于推测地上物的位置的信息例如摄像机11的参数以及图像上的地上物的位置。进而,处理器23也可以在地上物数据中包含在地上物的位置的推测时利用的地上物数据生成时的车辆2的位置、行进方向以及用于车辆2的本车位置的定位的gps信号的接收强度。然后,处理器23每当生成地上物数据时,经由通信接口21将该生成的地上物数据输出到无线通信终端13。由此,地上物数据被发送到服务器3。此外,处理器23也可以与地上物数据分开地,将用于地上物的位置的推测的信息与车辆2的识别信息一起经由无线通信终端13发送到服务器3。
38.根据变形例,处理器23也可以将由摄像机11生成的图像本身(以下,称为整体图像)或者通过从整体图像截取呈现有路面的区域而得到的部分图像作为地上物数据。在该情况下,处理器23也可以使地上物数据生成时的车辆2的位置、行进方向以及摄像机11的参数包含于地上物数据,以使服务器3能够从整体图像或者部分图像检测出地上物的位置。
39.另外,处理器23在检测到的地上物的位置包含于由从服务器3接收到的收集停止指示指定的收集停止区域的情况下,不论该地上物的位置是否包含于收集对象区域,都不生成关于该地上物的地上物数据。
40.接下来,说明作为地上物数据收集装置的一个例子的服务器3。
41.图4是作为地上物数据收集装置的一个例子的服务器3的硬件结构图。服务器3具有通信接口31、储存装置32、存储器33以及处理器34。通信接口31,储存装置32以及存储器
33经由信号线而与处理器34连接。服务器3也可以还具有键盘以及鼠标这样的输入装置和液晶显示器这样的显示装置。
42.通信接口31是通信部的一个例子,具有用于将服务器3与通信网络4连接的接口电路。并且,通信接口31构成为能够经由通信网络4以及无线基站5而与车辆2进行通信。即,通信接口31将经由无线基站5以及通信网络4从车辆2接收到的地上物数据交付给处理器34。另外,通信接口31经由通信网络4以及无线基站5将从处理器34收取到的收集指示以及收集停止指示发送到车辆2。
43.储存装置32是存储部的一个例子,例如,具有硬盘装置或者光记录介质及其访问装置。然后,储存装置32存储在地图数据收集处理中使用的各种数据以及信息。例如,储存装置32存储作为生成或者更新对象的地图、关于该地图所呈现的各地上物的位置的可靠度分布以及各车辆2的识别信息。此外,作为生成或者更新对象的地图是包含关于各地上物的位置的可靠度分布的地图信息的一个例子。进而,另外,储存装置32存储从各车辆2接收到的地上物数据。进而,另外,储存装置32也可以存储用于执行在处理器34上执行的地上物数据收集处理的计算机程序。
44.存储器33是存储部的另一个例子,例如,具有非易失性的半导体存储器以及易失性的半导体存储器。并且,存储器33临时地存储在执行地上物数据收集处理的过程中生成的各种数据等。
45.处理器34是控制部的一个例子,具有1个或者多个cpu(central processing unit,中央处理单元)及其周边电路。处理器34也可以还具有逻辑运算单元或者数值运算单元这样的其它运算电路。并且,处理器34执行地上物数据收集处理。
46.图5是与地上物数据收集处理关联的处理器34的功能框图。处理器34具有收集指示部41、接收处理部42、更新部43以及收集停止指示部44。处理器34所具有的这些各部分例如是通过在处理器34上进行动作的计算机程序实现的功能模块。或者,处理器34所具有的这些各部分也可以是设置于处理器34的专用的运算电路。
47.收集指示部41针对车辆2生成指示关于存在于收集对象区域内的地上物的地上物数据的收集的收集指示。各个收集对象区域例如能够设为通过将作为生成或者更新对象的地图所呈现的整体区域每隔预定的长度(例如,几十m~几百m)分割为格子状而设定的多个区域中的任意区域。但是,不限于该例子,也可以以关于道路的密度越高的区域使收集对象区域的面积越窄的方式,设定各个收集对象区域。或者,也可以以关于道路的特定的构造(例如,交叉路口、汇流或者分支)的密度越高的区域,使该区域的面积越窄的方式设定各个收集对象区域。或者另外,也可以以使各收集对象区域包括一个道路区间或者一个交叉路口的方式,设定各收集对象区域。例如,在新生成地图的情况下,收集指示部41将该地图所呈现的多个区域分别设定为收集对象区域。或者,收集指示部41也可以将作为更新对象的地图所呈现的多个区域中的从前次的更新起经过预定期间的区域设定为收集对象区域。或者另外,收集指示部41也可以依照经由输入装置输入的指定收集对象区域的信息,设定收集对象区域。进而,另外,收集指示部41也可以当从交通信息服务器接收到表示实施工程的地点的工程信息时,将包括实施该工程的地点的区域作为收集对象区域。
48.收集指示部41生成包含确定收集对象区域的信息的收集指示。然后,收集指示部41经由通信接口31将所生成的收集指示发送到车辆2。
49.接收处理部42每当经由无线基站5、通信网络4以及通信接口31从车辆2接收到地上物数据时,将接收到的地上物数据保存于存储器33或者储存装置32。另外,接收处理部42将接收到的地上物数据交付给更新部43。
50.更新部43关于收集对象区域内的各地上物,根据接收到的一个以上的地上物数据各自所表示的该地上物的位置,更新关于对应的地上物的位置的可靠度分布。此外,更新部43既可以每当接收到地上物数据时执行以下说明的更新处理、或者更新部43也可以每当接收到两个以上的预定数量的地上物数据时执行更新处理。
51.在本实施方式中,关于地上物的位置的可靠度概率分布能够设为沿着路面的2维状的正态分布。或者,该可靠度分布也可以是3维状的正态分布。然后,该可靠度分布如上所述针对每个位置表示在该位置处存在地上物的可靠度。
52.更新部43将接收到的地上物数据所表示的地上物与地图所呈现的各地上物中的任意地上物对应起来。此时,更新部43针对位于包括地上物数据所表示的地上物的位置的收集对象区域内的地图所呈现的每个地上物,计算从关于该地上物的可靠度最大的位置即可靠度分布中的平均值的位置直至地上物数据所表示的地上物的位置为止的距离。该距离也可以用马哈拉诺比斯距离表示。然后,更新部43将地上物数据所表示的地上物与地图所呈现的各地上物中的计算出的距离最小、且该距离为预定的距离阈值以下、并且与地上物数据所表示的地上物的种类相同的种类的地上物对应起来。
53.更新部43关于与接收到的地上物数据所表示的地上物对应起来的、地图所呈现的地上物,对该接收到的地上物数据以及此前收集到的各地上物数据所包含的地上物的位置进行最大似然推测,从而更新关于该地图所呈现的地上物的位置的可靠度分布。因而,以使关于接收到的地上物数据所表示的位置的可靠度变高的方式,更新可靠度分布。
54.或者,更新部43也可以通过贝叶斯更新对关于与接收到的地上物数据所表示的地上物对应起来的、地图所呈现的地上物的位置的可靠度分布进行更新。在该情况下,关于与接收到的地上物数据所表示的地上物对应起来的、地图所呈现的地上物,有可能会存在该地上物的范围预先被分割为格子状的多个分区。然后,针对每个分区,依照更新前的可靠度分布,设定该地上物所处的可靠度。此外,作为可靠度的初始值,既可以对各分区设定相同的可靠度,或者也可以关于存在该地上物的可能性越高的分区,设定越高的可靠度。更新部43当接收到地上物数据时,以使包括接收到的地上物数据所表示的地上物的位置的分区的可靠度变高的方式,更新各分区的可靠度。或者,更新部43也可以以使从接收到的地上物数据所表示的地上物的位置起预定范围内的各分区的可靠度变高的方式,更新各分区的可靠度。此时,更新部43也可以关于离该地上物的位置越近的分区,越增高可靠度的上升率。或者另外,更新部43也可以针对每个分区,设定以该分区为中心、且具有更新前的概率分布的方差协方差矩阵的概率分布。然后,更新部43也可以关于各分区,根据该分区的概率分布,计算针对接收到的地上物数据所表示的地上物的位置的在该分区存在地上物的后验概率,将该后验概率作为该分区的更新后的可靠度(即,下次更新时的该分区的先验概率)。然后,更新部43通过使各分区的可靠度近似为正态分布,从而计算关于该地上物的位置的更新后的可靠度分布。在该情况下,用于更新可靠度分布的地上物数据也可以被废弃,所以更新部43能够简化地上物数据的管理,并且还能够削减用于存储地上物数据的存储器容量。
55.或者,更新部43也可以针对每个地上物,设定关于该地上物的位置的可靠度分布
的多个候补。在该情况下,各候补能够设为用位置的平均值和方差协方差矩阵表示的正态分布。然后,更新部43当接收到地上物数据时,计算针对接收到的地上物数据所表示的地上物的位置的各候补的后验概率,将该后验概率作为下次更新时的各候补的先验概率。更新部43将与先验概率最大的候补相当的正态分布作为关于该地上物的位置的可靠度分布。在该情况下,更新部43也能够简化地上物数据的管理,并且还能够削减用于存储地上物数据的存储器容量。
56.或者另外,更新部43也可以以收集对象区域为单位,更新该收集对象区域所包含的相同种类的多个地上物各自的可靠度分布。在该情况下,规定包括相同种类的多个地上物各自的可靠度分布的混合正态分布。然后,更新部43对关于该收集对象区域接收到的地上物数据以及此前收集到的地上物数据所表示的地上物的位置应用期待值最大化算法,从而更新所规定的混合正态分布。由此,更新该更新后的混合正态分布所包含的各地上物的可靠度分布。根据该变形例,更新部43即使在如在收集对象区域内密接地存在相同种类的多个地上物的情况那样在接收到的地上物数据所表示的地上物难以对应起来的情况,也能够适当地更新关于各地上物的位置的可靠度分布。
57.更新部43针对关于位置的可靠度分布被更新的地上物,将该更新后的可靠度分布通知给收集停止指示部44,并且存储于储存装置32。
58.收集停止指示部44针对关于位置的可靠度分布被更新的地上物,根据该可靠度分布的扩展程度来判定是否停止收集关于该地上物的地上物数据。
59.如上所述,在用正态分布表示关于位置的可靠度分布的情况下,可靠度分布根据位置的平均值和方差协方差矩阵来规定。然后,该位置的平均值处的可靠度越高、或者方差协方差矩阵的各要素的值越小,则该可靠度分布的扩展程度越小。然后,可靠度分布的扩展程度越小,则越要求准确的地上物的位置。因而,收集停止指示部44关于就位置的可靠度分布被更新后的地上物,在更新后的可靠度分布的扩展程度为与该扩展程度有关的阈值以下的情况下,停止收集地上物数据。具体而言,收集停止指示部44在表示更新后的可靠度分布的方差协方差矩阵中的各方向的方差值中的最大方差值为预定的方差阈值以下的情况下,判定为可靠度分布的扩展程度为与该扩展程度有关的阈值以下。然后,收集停止指示部44关于该地上物而停止收集地上物数据。或者,收集停止指示部44在规定更新后的可靠度分布的位置的平均值处的可靠度为预定的可靠度阈值以上的情况下,判定为可靠度分布的扩展程度为与该扩展程度有关的阈值以下。然后,收集停止指示部44关于该地上物停止收集地上物数据。这样,通过判定地上物数据的收集的停止,收集停止指示部44能够在准确地求出地上物的位置的定时停止收集地上物数据。
60.收集停止指示部44关于判定为停止收集地上物数据的地上物,将关于该地上物的位置的可靠度分布中的以位置的平均值为中心的预定范围指定为收集停止区域。然后,收集停止指示部44制作包含表示该收集停止区域的信息的收集停止指示,经由通信接口31将制作出的收集停止指示发送到车辆2。由此,停止收集与位于收集停止区域内的地上物有关的地上物数据。
61.图6是表示关于地上物的位置的可靠度分布的示意图。如图6所示,针对地上物601,求出以该位置的平均值μ1为中心的可靠度分布611。同样地,针对地上物602以及地上物603,求出以该位置的平均值μ2为中心的可靠度分布612和以该位置的平均值μ3为中心的
可靠度分布613。此外,在图6的上侧,关于各可靠度分布,示出了马哈拉诺比斯距离为1的范围,在图6的下侧,关于各可靠度分布,示出了沿着道路600的延伸方向的每个位置的可靠度。
62.关于地上物601,道路600的延伸方向上的可靠度分布611的方差值σ1比方差阈值thσ大。另外,位置的平均值μ1处的可靠度c1比可靠度阈值thc小。因此,关于地上物601,继续地上物数据的收集。
63.另一方面,关于地上物602,对于任意的方向,可靠度分布612的方差值σ2都为方差阈值thσ以下。因此,推测为用可靠度分布612表示的地上物602的位置足够可信。作为其结果,关于地上物602,停止收集地上物数据。
64.另外,关于地上物603,可靠度分布613的位置的平均值μ3处的可靠度c3为可靠度阈值thc以上。因此,推测为用可靠度分布613表示的地上物603的位置足够可信。作为其结果,关于地上物603,停止收集地上物数据。
65.图7是服务器3中的地上物数据收集处理的动作流程图。服务器3的处理器34每隔预定的周期依照以下所示的动作流程图执行地上物数据收集处理即可。
66.处理器34的接收处理部42将从车辆2接收到的地上物数据保存于存储器33或者储存装置32(步骤s101)。另外,处理器34的更新部43根据接收到的地上物数据所表示的地上物的位置以及种类,将该地上物数据所表示的地上物与地图所呈现的任意地上物对应起来(步骤s102)。然后,更新部43根据该地上物数据所表示的地上物的位置,更新关于对应起来的地上物的位置的可靠度分布(步骤s103)。
67.处理器34的收集停止指示部44判定更新后的可靠度分布的扩展程度是否为预定的阈值以下(步骤s104)。在扩展程度为预定的阈值以下的情况下(步骤s104-是),收集停止指示部44生成停止关于与该可靠度分布对应的地上物的地上物数据的收集的收集停止指示。然后,收集停止指示部44经由通信接口31将收集停止指示发送到车辆2(步骤s105)。
68.当在步骤s105之后、或者在步骤s104中可靠度分布的扩展程度比预定的阈值大的情况下(步骤s104-否),处理器34关于与该可靠度分布对应的地上物,判定为继续收集地上物数据。然后,处理器34结束地上物数据收集处理。
69.如以上说明那样,该地上物数据收集装置关于收集对象区域内的各地上物,用可靠度分布表示该地上物的位置。该地上物数据收集装置针对每个地上物,使用关于该地上物接收到的地上物数据所表示的地上物的位置来更新关于该地上物的位置的可靠度分布。然后,该地上物数据收集装置关于可靠度分布的扩展程度为预定的阈值以下的地上物,停止收集地上物数据。这样,该地上物数据收集装置能够针对每个地上物,在该地上物的位置的可靠度足够高的时间点停止收集地上物数据,所以能够适当地设定停止收集表示该地上物的数据的定时。
70.根据变形例,数据获取装置14也可以在地上物数据中包含从车辆2至检测到的地上物的位置为止的距离。假设从车辆2至检测到的地上物的位置为止的距离越短,则地上物的位置越准确。因而,地上物数据所包含的从车辆2至检测到的地上物的位置为止的距离越短,则更新部43越增高关于地上物的位置的可靠度分布的更新中的该地上物数据所表示的地上物的位置的贡献度。例如,更新部43在通过最大似然推测来更新可靠度分布的情况下,将对各地上物数据所表示的地上物的位置乘以权重系数而得到的加权位置用于最大似然
推测。此时,从车辆2至检测到的地上物的位置为止的距离越短,则更新部43越增大权重系数即可。另外,更新部43在通过贝叶斯更新对可靠度分布进行更新的情况下,从车辆2至检测到的地上物的位置为止的距离越短,则越增高包括该位置的分区的可靠度的上升率。
71.根据该变形例,地上物数据收集装置能够更适当地更新关于地上物的位置的可靠度分布。
72.进而,使计算机实现上述各实施方式或者变形例的地上物数据收集装置的处理器所具有的各部分的功能的计算机程序也可以以存储于能够由计算机读取的记录介质的形式提供。此外,能够由计算机读取的记录介质例如能够设为磁记录介质、光记录介质或者半导体存储器。
73.如以上那样,本领域技术人员能够在本发明的范围内与实施的方式相匹配地进行各种变更。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1