一种路内停车无人值守收费管理方法与流程
本技术涉及智能化管理,为一种市政智能化管理,具体涉及一种路内停车无人值守收费管理方法。
背景技术:
1、随着国内汽车保有量的增长,汽车泊位逐渐紧张,城市道路内划设的临时停车泊位缓解了城市停车困难,但其停车管理面临重大挑战。
2、目前开放式的路内停车管理主要还为人工管理的方式,通过人工管理由巡检员手持pda录入管理区域内进入泊位上车辆的信息,并在其离开车位时上前收费。但人工管理收费存在收费员管理区域有限,收费难以监管,则逃欠费无法追缴,且运营管理人力成本高。所以需要提供一种能够实现降低人力成本并且对于车辆停放进行管理的方法。
3、在现有技术中,专利(cn113593057a、一种基于无人机巡检的路内停车位管理方法)提供了一种无人机巡检的路内停车位管理方法,通过在停车区域内配置有无人机进行巡检,将无人机获取的多个泊位图像输入至目标车辆检测网络模型,得到含有目标车辆的泊位图像及目标车辆位置。将无人机获取的目标车辆图像输入至车牌分割网络模型,得到目标车牌图像。对目标车牌图像进行处理,得到目标车牌号码。若无人机巡检拍摄到目标车辆未在停车位,则记录本次巡检拍摄到目标车辆未在停车位的时间,并获取上一次无人机巡检拍摄到目标车辆图像的时间,计算两个时间的中值,将中值作为驶出时间。根据驶入时间和驶出时间计算目标车辆停车费用。从而达到无需人工监控而对停车位上的车辆进行记录管理的效果,提高停车收费的效率。但是在此现有技术中,存在以下的问题:1.此方法主要用于巡检管理,但是针对于车辆的进入和使出通过统计学的估计方式实现,导致对于车辆的停留时间的计算不准确,容易导致收费不准确的技术问题。2.针对于人工车辆管理,不仅能够实现关于车辆的费用的收取,还能够实现对于车辆停放的管理,例如在进行车辆停放时,对于驾驶者的停放姿态具有良好的控制管理能力。但是对于无人化管理方式,对于车辆的停放的姿态管理主要通过驾驶者的文明程度进行控制,当驾驶者将车辆停放横跨或者偏离标准车道时,则会造成他人的停放困难,而且因为一辆车占用两个车道的问题也无法体现收费的公平性。但是在现有技术中通过巡检的方式无法解决此问题。
4、所以,需要在现有的无人值守的智能化管理方式中,提供一种新的方法不仅实现对于车辆驶入驶出时间的准确管理,以及还需要对车辆姿态的管理和控制进行识别以及对应的管理,实现完全智能化的无人值守管理和收费。
技术实现思路
1、为了解决以上的技术问题,本技术提供一种路内停车无人值守收费管理方法,能够实现对于公共场合中路内的车辆的无人值守的收费管理。
2、为了达到上述目的,本技术实施例采用的技术方案如下:
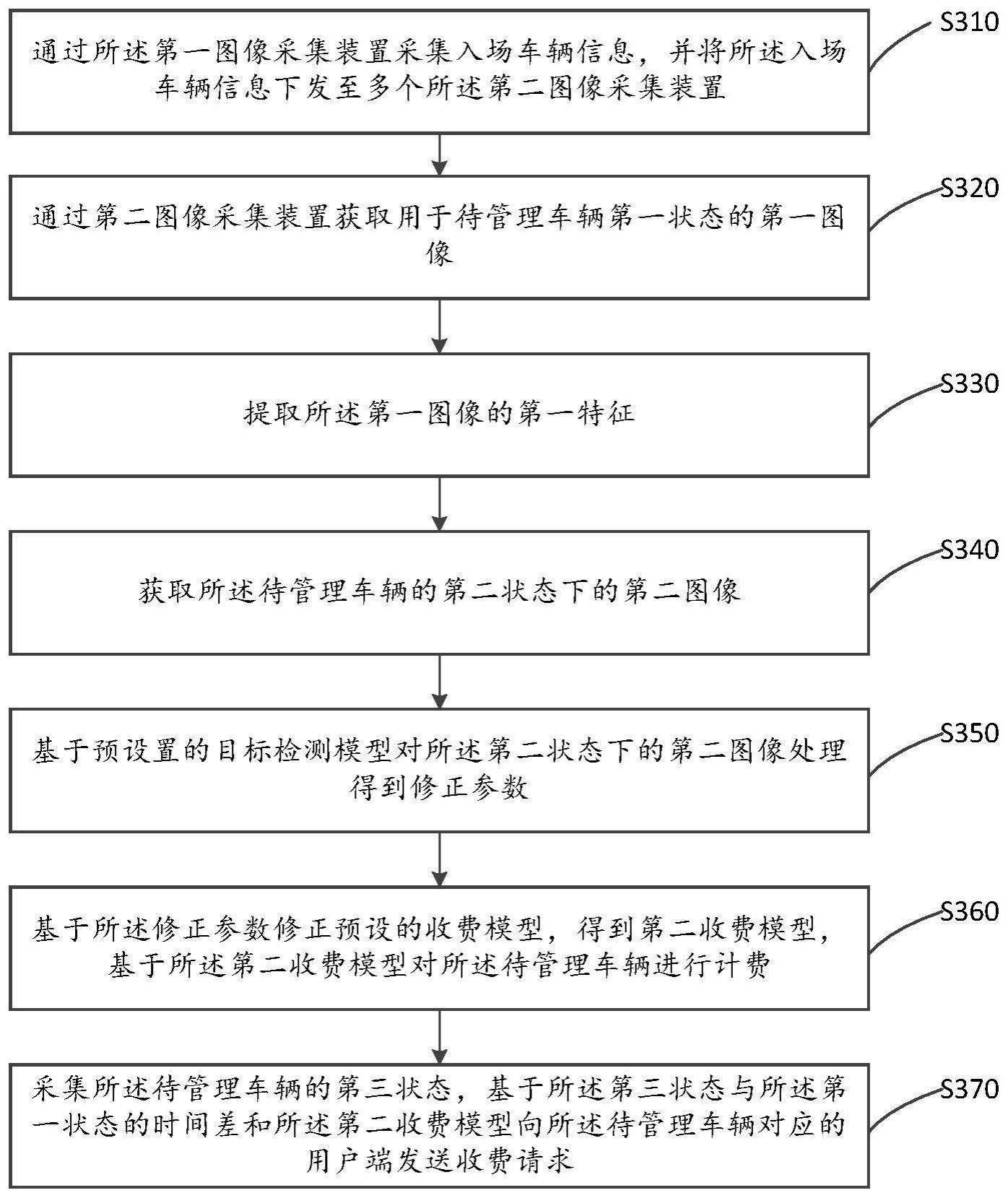
3、第一方面,一种路内停车无人值守收费管理方法,应用于所述无人值守收费管理系统,所述无人值守收费管理系统包括第一图像采集装置和多个第二图像采集装置,所述第一图像采集装置设置在停车区域进场和出场位置处,所述第二图像采集装置设置在独立的待停放区域的上部中间位置,所述图像采集装置内设置有多个检测模型;所述方法包括:通过所述第一图像采集装置采集入场车辆信息,并将所述入场车辆信息下发至多个所述第二图像采集装置;通过所述第二图像采集装置获取用于待管理车辆第一状态的第一图像;提取所述第一图像的第一特征,所述第一特征用于表征所述待管理车辆的车辆信息;获取所述待管理车辆的第二状态下的第二图像;基于预设置的目标检测模型对所述第二状态下的第二图像处理得到修正参数,所述目标检测模型中设置有检测框,所述检测框用于表征停车区域的位置信息;基于所述修正参数修正预设的收费模型,得到第二收费模型,基于所述第二收费模型对所述待管理车辆进行计费;采集所述待管理车辆的第三状态,基于所述第三状态与所述第一状态的时间差和所述第二收费模型向所述待管理车辆对应的用户端发送收费请求,所述用户端通过所述第一特征进行确定;提取所述待管理车辆的第一特征包括:将所述第一图像通过图像分割单元得到第一目标图像和第二目标图像;通过图像转换单元提取所述第一目标图像中第一特征;基于预设置的目标检测模型对所述第二状态下的第二图像处理得到修正参数,包括获取所述第二状态下的第一目标图像的四个点坐标;将所述四个点坐标转换为实时检测框,所述实时检测框用于表征所述待管理车辆的实时位置信息;将所述检测框与所述实时检测框进行比对,得到有关所述待管理车辆与所述停车区域关联的iou值;基于预设置的iou阈值确定所述修正参数。
4、在第一方面的第一种可能的实现方式中,通过第二图像采集装置获取待管理车辆第一状态、第二状态的第一图像,包括:通过所述图像采集装置获取待管理车辆的多个视频帧;基于所述多个视频帧的变化,确定所述待管理车辆的第一状态和第二状态;将所述多个视频帧通过收敛的识别模型处理得到第一状态下的第一关键帧和第二状态下的第二关键帧,所述第一关键帧与所述第一图像关联,所述第二关键帧与所述第二图像关联;基于所述多个视频帧的变化,确定所述待管理车辆的第一状态和第二状态,包括:获取所述第一目标图像中的第二特征,基于所述第二特征确定的变化确定所述第一状态和第二状态。
5、结合第一方面的第一种可能的实现方式,在第二种可能的实现方式中,将所述第一图像通过图像分割单元得到第一目标图像和第二目标图像,包括:将所述第一图像通过灰度处理得到待分割图像;对所述待分割图像通过边缘检测、形态学处理和图像提取处理得到第二目标图像。
6、结合第一方面的第二种可能的实现方式,在第三种可能的实现方式中,提取所述待管理车辆的第一特征,包括:对所述第二目标图像进行二值化处理;将二值化处理的第二目标图像进行腐蚀与膨胀处理;将腐蚀与膨胀处理处理后的第二目标图像进行关键特征分割,得到分割后的关键特征;将所述关键特征与预设的匹配模板进行匹配得到第一特征。
7、结合第一方面的第一种可能的实现方式,在第四种可能的实现方式中,获取所述第二状态下的第二图像的第二特征,将提取后的第二特征转换为实时检测框,包括所述第二图像输入至训练后的特征提取模型中得到实时检测框。
8、结合第一方面的第四种可能的实现方式,在第五种可能的实现方式中,所述检测框基于车辆待停放区域的标准停车区域构建,所述标准停车区域为四边形边界框,构建方法包括:获取所述四边形边界框的四个点坐标;将所述四个点坐标围成的区域通过区域透视变换为矩形区域,所述矩形区域为检测框。
9、结合第一方面的第五种可能的实现方式,在第六种可能的实现方式中,获取所述四边形边界框的四个点坐标,包括:获取标准停车区域的停车区域图像,并获取所述停车区域的任一帧为停车区域图像帧;对所述停车区域图像帧进行灰度处理得到灰度处理后的停车区域帧;将灰度处理后的停车区域帧通过高斯模糊处理后得到模糊处理后的停车区域帧;将模糊处理后的停车区域帧通过膨胀腐蚀处理后得到腐蚀处理后的停车区域帧;将腐蚀处理后的停车区域帧通过边缘检测和轮廓检测后得到的所述标准停车区域的四个点坐标。
10、结合第一方面的第一种可能的实现方式,在第七种可能的实现方式中,获取所述第二状态下的第一目标图像的四个点坐标,包括:对所述第二关键帧进行灰度处理得到灰度处理后的第二关键帧;将灰度处理后的第二关键帧通过高斯模糊处理后得到模糊处理后的停车区域帧;将模糊处理后的第二关键帧通过膨胀腐蚀处理后得到腐蚀处理后的停车区域帧;将腐蚀处理后的第二关键帧通过边缘检测和轮廓检测后得到的所述标准停车区域的四个点坐标。
11、结合第一方面的第七种可能的实现方式,在第八种可能的实现方式中,将所述四边坐标转换为实时检测框,包括:将所述四边坐标围成的区域通过区域透视变换为矩形区域,所述矩形区域为实时检测框。
12、在第一方面的第九种可能的实现方式中,所述方法还包括:基于所述修正参数通过报警装置进行报警提醒;所述方法还包括:将识别信息发送至目标范围内的多个衍生图像采集装置,基于多个所述衍生图像采集装置对识别对象进行跟踪识别直至所述识别对象在多个所述衍生图像采集装置的实时图像数据中不存在对应的视频帧。
13、第二方面,一种路内停车无人值守收费管理系统,包括服务器以及通过网关与所述服务器连接的图像采集装置和多个用户端,所述图像采集装置用于采集对应的实时数据;所述服务器内设置有收费管理方法,用于对所述实时数据处理得到停车信息,并对所述停车信息进行处理得到收费信息,并将所述收费信息发送至对应的所述用户端。
14、在第二方面的第一种可能的实现方式中,所述路内停车无人值守收费管理系统还包括报警装置,所述报警装置与服务器通信,基于停车信息进行实时报警。
15、第三方面,提供一种终端设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如权利要求上述任一项所述的方法。
16、第四方面,提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求上述任一项所述的方法。
17、本技术实施例提供的技术方案中,通过对于获取的图像进行处理得到关于图像中包含车辆的四个点坐标,通过四个点坐标的透视转化得到实时检测框,并通过设置的关于停车位的标准的检测框,实现两个检测框之间的比较,通过比较两个检测框实现对于车辆是否在标准的停车区域以及车辆的停车位置的信息,基于此信息确定对于车辆的收费标准,调整标准收费实现对于占用车道者的合理收费。并且通过设置的关于车辆的分割以及车辆的信息的获取,实现对于车辆进场时间和出场时间的准确获得以及车辆信息的准确获得,实现了整体的收费的合理性和管理的准确性。
- 还没有人留言评论。精彩留言会获得点赞!