车辆自动驾驶软件的测试方法、装置、设备及存储介质与流程
本公开涉及自动驾驶,尤其涉及一种车辆自动驾驶软件的测试方法、装置、设备及存储介质。
背景技术:
1、自动驾驶软件的感知部分是自动驾驶其它部分下游的主要输入,感知结果会直接影响自动驾驶软件的最终决策。因此对感知能力进行测试对于自动驾驶软件功能的顺利实现尤为重要。相关技术中的测试方法主要通过人工进行路测获取测试数据,并将测试数据和实际数据进行对比以对感知能力进行测试,测试效率较低。
技术实现思路
1、为克服相关技术中存在的问题,本公开提供一种车辆自动驾驶软件的测试方法、装置、电子设备及存储介质。
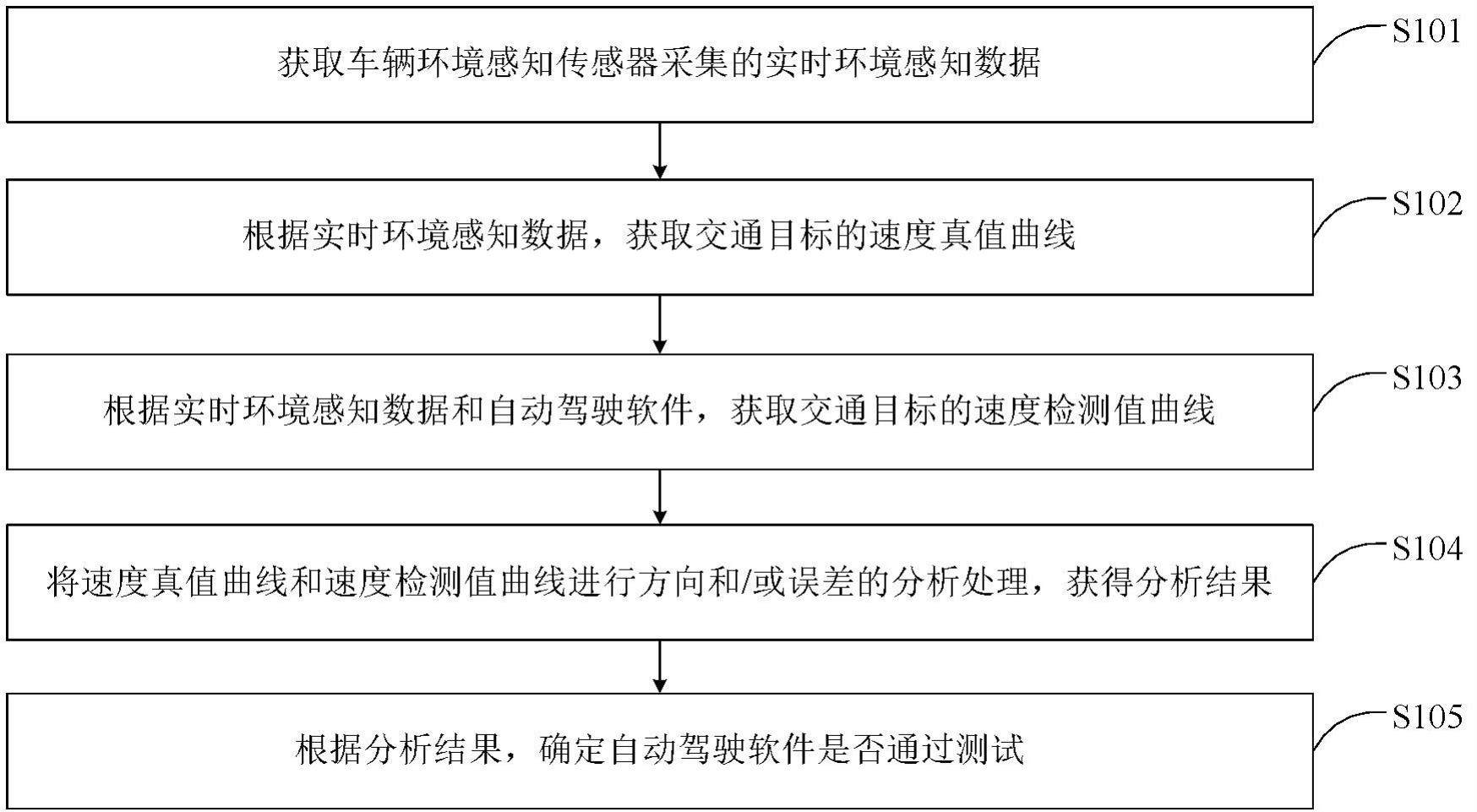
2、根据本公开实施例的第一方面,提供一种车辆自动驾驶软件的测试方法,包括:获取车辆环境感知传感器采集的实时环境感知数据;根据所述实时环境感知数据,获取交通目标的速度真值曲线;根据所述实时环境感知数据和所述自动驾驶软件,获取所述交通目标的速度检测值曲线;将所述速度真值曲线和所述速度检测值曲线进行方向和/或误差的分析处理,获得分析结果;根据所述分析结果,确定所述自动驾驶软件是否通过测试。
3、在一种实现方式中,所述环境感知传感器至少包括激光雷达,所述实时环境感知数据至少包括实时激光点云数据;其中,所述根据所述实时环境感知数据,获取交通目标的速度真值曲线,包括:根据所述实时激光点云数据和训练好的第一点云深度学习模型,获取目标识别结果;所述目标识别结果包括目标的实时大小和实时位置;其中,所述训练好的第一点云深度学习模型是根据样本目标的标注信息得到的模型,所述标注信息至少包括所述样本目标的大小和位置;根据所述目标识别结果之中所述目标的实时大小和实时位置,获取所述交通目标的实时位置信息;确定所述实时激光点云数据对应的时间信息,并根据所述实时位置信息和所述时间信息,获取所述交通目标的速度真值曲线。
4、在一种实现方式中,所述环境感知传感器包括以下传感器中的至少一种:激光雷达、摄像头和毫米波雷达;所述实时环境感知数据包括以下数据中的至少一种:实时激光点云数据、实时图像数据和实时毫米波雷达数据;所述自动驾驶软件包括以下感知模型中的至少一种:第二点云深度学习模型、图像识别模型和毫米波雷达感知模型。
5、在一种实现方式中,所述将所述速度真值曲线和所述速度检测值曲线进行方向和/或误差的分析处理,获得分析结果,包括:将所述速度真值曲线和所述速度检测值曲线逐点进行方向和/或误差的分析;获得所述速度真值曲线和所述速度检测值曲线相同点的速度方向分析结果和/或速度误差分析结果。
6、在一种可选地实现方式中,所述根据所述分析结果,确定所述自动驾驶软件是否通过测试,包括:根据所述速度真值曲线和所述速度检测值曲线相同点的速度方向分析结果和/或速度误差分析结果,获取所述速度真值曲线和所述速度检测值曲线之中存在速度反向和/或速度误差满足预设条件的目标点;根据所述存在速度反向和/或速度误差满足预设条件的目标点,确定所述自动驾驶软件引起车辆行车问题的总次数;根据所述引起车辆行车问题的总次数,确定所述自动驾驶软件是否通过测试。
7、可选地,所述根据所述存在速度反向和/或速度误差满足预设条件的目标点,确定所述自动驾驶软件引起车辆行车问题的总次数,包括:对所述速度真值曲线和所述速度检测值曲线进行滑窗处理,并获得存在所述速度反向和/或速度误差满足预设条件的目标点的滑窗的个数;将存在所述速度反向和/或速度误差满足预设条件的目标点的滑窗的个数,确定为所述自动驾驶软件引起车辆行车问题的总次数。
8、在一种可选地实现方式中,所述方法还包括:响应于所述自动驾驶软件未通过测试,根据所述实时环境感知数据确定对应的场景信息,和/或,根据所述实时环境感知数据确定所述交通目标的类别。
9、根据本公开实施例的第二方面,提供一种车辆自动驾驶软件的测试装置,包括:获取模块,用于获取车辆环境感知传感器采集的实时环境感知数据;第一处理模块,用于根据所述实时环境感知数据,获取交通目标的速度真值曲线;第二处理模块,用于根据所述实时环境感知数据和所述自动驾驶软件,获取所述交通目标的速度检测值曲线;第三处理模块,用于将所述速度真值曲线和所述速度检测值曲线进行方向和/或误差的分析处理,获得分析结果;确定模块,用于根据所述分析结果,确定所述自动驾驶软件是否通过测试。
10、在一种实现方式中,所述环境感知传感器至少包括激光雷达,所述实时环境感知数据至少包括实时激光点云数据;其中,所述第二处理模块具体用于:根据所述实时激光点云数据和训练好的第一点云深度学习模型,获取目标识别结果;所述目标识别结果包括目标的实时大小和实时位置;其中,所述训练好的第一点云深度学习模型是根据样本目标的标注信息得到的模型,所述标注信息至少包括所述样本目标的大小和位置;根据所述目标识别结果之中所述目标的实时大小和实时位置,获取所述交通目标的实时位置信息;确定所述实时激光点云数据对应的时间信息,并根据所述实时位置信息和所述时间信息,获取所述交通目标的速度真值曲线。
11、在一种实现方式中,所述环境感知传感器包括以下传感器中的至少一种:激光雷达、摄像头和毫米波雷达;所述实时环境感知数据包括以下数据中的至少一种:实时激光点云数据、实时图像数据和实时毫米波雷达数据;所述自动驾驶软件包括以下感知模型中的至少一种:第二点云深度学习模型、图像识别模型和毫米波雷达感知模型。
12、在一种实现方式中,所述第三处理模块具体用于:将所述速度真值曲线和所述速度检测值曲线逐点进行方向和/或误差的分析;获得所述速度真值曲线和所述速度检测值曲线相同点的速度方向分析结果和/或速度误差分析结果。
13、在一种可选地实现方式中,所述确定模块具体用于:根据所述速度真值曲线和所述速度检测值曲线相同点的速度方向分析结果和/或速度误差分析结果,获取所述速度真值曲线和所述速度检测值曲线之中存在速度反向和/或速度误差满足预设条件的目标点;根据所述存在速度反向和/或速度误差满足预设条件的目标点,确定所述自动驾驶软件引起车辆行车问题的总次数;根据所述引起车辆行车问题的总次数,确定所述自动驾驶软件是否通过测试。
14、可选地,所述确定模块具体用于:对所述速度真值曲线和所述速度检测值曲线进行滑窗处理,并获得存在所述速度反向和/或速度误差满足预设条件的目标点的滑窗的个数;将存在所述速度反向和/或速度误差满足预设条件的目标点的滑窗的个数,确定为所述自动驾驶软件引起车辆行车问题的总次数。
15、在一种实现方式中,所述装置还包括:第四处理模块,用于响应于所述自动驾驶软件未通过测试,根据所述实时环境感知数据确定对应的场景信息,和/或,根据所述实时环境感知数据确定所述交通目标的类别。
16、根据本公开实施例的第三方面,提供一种电子设备,包括:至少一个处理器;以及与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行如前述第一方面所述的方法。
17、根据本公开实施例的第四方面,提供一种计算机可读存储介质,用于存储有指令,当所述指令被执行时,使如第一方面所述的方法被实现。
18、根据本公开实施例的第五方面,提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现第一方面所述方法的步骤。
19、本公开的实施例提供的技术方案可以包括以下有益效果:可以基于车辆环境感知传感器采集的实时环境感知数据获取交通目标的速度真值曲线,并结合自动驾驶软件获取该交通目标的速度检测值曲线,从而根据对速度真值曲线和速度检测值曲线进行分析获得的分析结果,确定自动驾驶软件是否通过测试。可以基于大规模的实时环境感知数据进行自动化对比,从而实现对自动驾驶软件的感知能力的检测,保障自动驾驶软件的安全性和有效性。
20、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
- 还没有人留言评论。精彩留言会获得点赞!