一种基于大数据的行车数据智能监测方法及系统与流程
本发明涉及行车数据监测,具体为一种基于大数据的行车数据智能监测方法及系统。
背景技术:
1、在车辆行驶过程中进行数据监测能够帮助及时发现并解决车辆异常情况,保障车辆的正常行驶,能够直观地观察到行车数据,传统的监测方式是通过车载传感器和计算机系统来获取车辆行驶数据,但这种方式一般需要给车辆配备专门的obd设备来获取车辆信息,由于汽车车型较多,且大部分厂家并不对外提供车机系统的对接协议,因此obd设备的适配率较低,无法满足大部分车型通过obd设备获取行车数据信息的需求,仪表盘作为车辆行驶状态和故障信息的重要显示界面,通过对仪表盘进行拍摄和图像识别技术能够获取到行车数据,且无须考虑设备适配的问题,适应性更强;
2、然而,在通过拍摄仪表盘来获取行车数据时,存在驾驶人员动作时容易遮挡住仪表盘从而导致拍摄的仪表盘图像信息显示不完整的现象,需要对拍摄设备的安装位置进行适应性调整;其次,对仪表盘图像进行识别获取行车数据后,需要通过对行车数据进行分析来判断车辆是否出现异常状况,若出现拍摄设备中途故障的问题,导致传输至终端的用于分析的行车数据过少,降低了行车数据的参考价值和分析结果的准确性。
3、所以,人们需要一种基于大数据的行车数据智能监测方法及系统来解决上述问题。
技术实现思路
1、本发明的目的在于提供一种基于大数据的行车数据智能监测方法及系统,以解决上述背景技术中提出的问题。
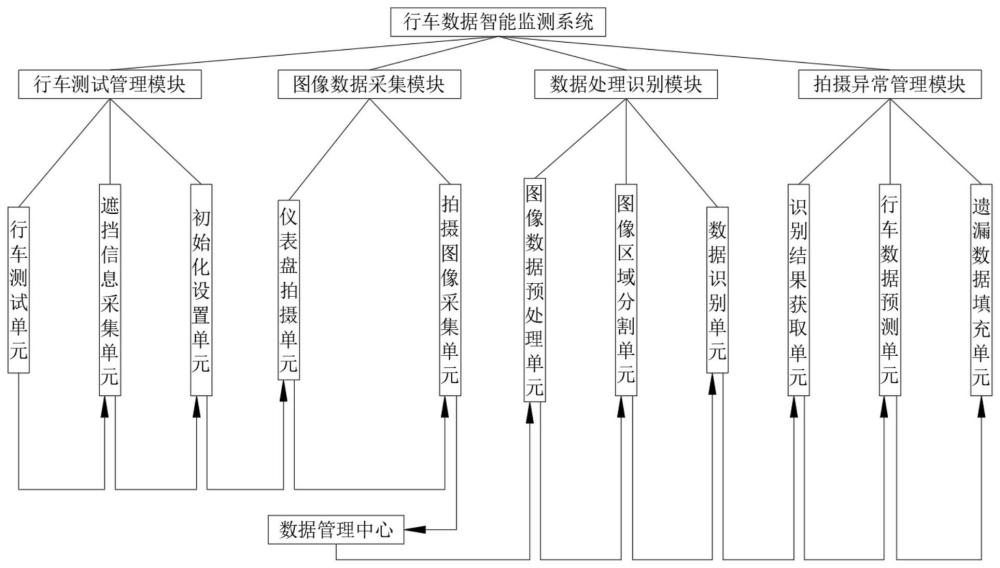
2、为了解决上述技术问题,本发明提供如下技术方案:一种基于大数据的行车数据智能监测系统,所述系统包括:行车测试管理模块、图像数据采集模块、数据管理中心、数据处理识别模块和拍摄异常管理模块;
3、所述行车测试管理模块的输出端连接所述图像数据采集模块的输入端,所述图像数据采集模块的输出端连接所述数据管理中心的输入端,所述数据管理中心的输出端连接所述数据处理识别模块的输入端,所述数据处理识别模块的输出端连接所述拍摄异常管理模块的输入端;
4、通过所述行车测试管理模块进行车辆驾驶拍摄测试,选择用于仪表盘拍摄的摄像头的最佳初始化安装位置;
5、通过所述图像数据采集模块在用户驾驶车辆过程中,利用安装的摄像头实时采集仪表盘图像,将图像数据传输到所述数据管理中心;
6、通过所述数据管理中心存储并管理接收到的图像数据;
7、通过所述数据处理识别模块从所述数据管理中心中调取图像数据,进行图像处理和识别,获取识别数据;
8、通过所述拍摄异常管理模块在摄像头拍摄出现异常时进行识别数据填充处理,将填充处理后的识别数据传输至监测终端。
9、进一步的,所述行车测试管理模块包括行车测试单元、遮挡信息采集单元和初始化设置单元;
10、所述行车测试单元的输出端连接所述遮挡信息采集单元的输入端,所述遮挡信息采集单元的输出端连接所述初始化设置单元的输入端;
11、所述行车测试单元用于安排不同人员驾驶车辆,随机选择若干个位置安装摄像头,其中,选择的位置处安装的所有摄像头在无物体遮挡的前提下都能够拍摄到完整的仪表盘图像,利用不同位置安装的摄像头在不同人员驾驶车辆的过程中实时拍摄仪表盘图像;
12、所述遮挡信息采集单元用于采集不同位置安装的摄像头拍摄到的仪表盘图像被遮挡的次数以及被遮挡图像,被遮挡图像指的是因有物体遮挡导致未拍摄到完整仪表盘的图像;
13、所述初始化设置单元用于分析不同位置处安装的摄像头拍摄图像的被影响系数,比较被影响系数,依据比较结果选择摄像头的最佳初始化安装位置,在最佳初始化安装位置处安装摄像头拍摄车辆仪表盘图像。
14、进一步的,所述图像数据采集模块包括仪表盘拍摄单元和拍摄图像采集单元;
15、所述仪表盘拍摄单元的输入端连接所述初始化设置单元的输出端,所述仪表盘拍摄单元的输出端连接所述拍摄图像采集单元的输入端,所述拍摄图像采集单元的输出端连接所述数据管理中心的输入端;
16、所述仪表盘拍摄单元用于在用户驾驶车辆过程中,利用摄像头实时拍摄仪表盘图像;
17、所述拍摄图像采集单元用于采集拍摄到的仪表盘图像数据,将采集到的图像数据传输到所述数据管理中心。
18、进一步的,所述数据处理识别模块包括图像数据预处理单元、图像区域分割单元和数据识别单元;
19、所述图像数据预处理单元的输入端连接所述数据管理中心的输出端,所述图像数据预处理单元的输出端连接所述图像区域分割单元的输入端,所述图像区域分割单元的输出端连接所述数据识别单元的输入端;
20、所述图像数据预处理单元用于对采集到的仪表盘图像进行预处理,预处理包括去噪、增强和畸变校正,采用中值滤波器或高斯滤波器对图像进行去噪处理,采用直方图均衡化或对比度增强方法对图像进行增强处理,利用相机标定算法对仪表盘图像进行畸变校正处理,相机标定算法可以是张正友标定法和tsai标定法,将经预处理后的图像传输到所述图像区域分割单元;
21、所述图像区域分割单元用于对图像中的仪表盘区域和其他区域进行分割,分割方法可以是阈值分割法和边缘分割法;
22、所述数据识别单元用于利用机器学习对仪表盘区域进行数据识别,识别数据包括里程、油量、水箱温度和故障灯信息,故障灯信息包括发动机故障、制动系统故障、abs故障、轮胎压力监测系统故障、冷却系统故障等。
23、进一步的,所述拍摄异常管理模块包括识别结果获取单元、行车数据预测单元和遗漏数据填充单元;
24、所述识别结果获取单元的输入端连接所述数据识别单元的输出端,所述识别结果获取单元的输出端连接所述行车数据预测单元的输入端,所述行车数据预测单元的输出端连接所述遗漏数据填充单元的输入端;
25、所述识别结果获取单元用于当安装的摄像头在用户驾驶车辆过程中发生故障时,获取故障发生前识别到的汽车里程、油量和水箱温度数据;
26、所述行车数据预测单元用于分析故障发生前的里程、油量和水箱温度变化数据,建立行车数据预测模型,预测后续若干次的汽车里程、油量和水箱温度;
27、所述遗漏数据填充单元用于将预测到的数据填充进入故障发生前识别到的数据记录内,将填充完成后的识别数据记录传输到监测终端。
28、一种基于大数据的行车数据智能监测方法,包括以下步骤:
29、z1:进行车辆驾驶拍摄测试,选择用于仪表盘拍摄的摄像头的最佳初始化安装位置;
30、z2:在用户驾驶车辆过程中,利用安装的摄像头实时采集仪表盘图像;
31、z3:进行图像处理和识别,获取识别数据;
32、z4:在摄像头拍摄出现异常时进行识别数据填充处理;
33、z5:将填充处理后的识别数据传输至监测终端。
34、进一步的,在步骤z1中:安排n个人员驾驶车辆,随机选择c个位置安装摄像头,利用不同位置安装的摄像头在不同人员驾驶车辆的过程中实时拍摄仪表盘图像,n个人员的行驶路线相同,在每个人员驾驶车辆过程中每个摄像头都拍摄了j张图像,统计到在所有人员驾驶车辆完成路线行驶后,不同位置安装的摄像头拍摄到的仪表盘图像被遮挡的次数集合为m={m1,m2,…,mc},采集所有被遮挡图像,利用边缘检测法检测出图像中遮挡住仪表盘的区域轮廓,以图像中心为原点建立二维坐标系,在检测出的区域轮廓上随机选取m个点,获取到m个点的位置坐标,计算并比较m个点两两之间的直线距离,获取到最长直线距离,获取到随机一个摄像头拍摄到的被遮挡图像中m个点两两之间的最长直线距离集合为l={l1,l2,…,lk},其中,k表示随机一个摄像头拍摄到的被遮挡图像个数,统计不同摄像头拍摄到的被遮挡图像中m个点两两之间的最长直线距离,根据下列公式计算随机一个位置处安装的摄像头拍摄图像的被影响系数ui:
35、
36、其中,mi表示在所有人员驾驶车辆完成路线行驶后,随机一个位置处安装的摄像头拍摄到的仪表盘图像被遮挡的次数,lj表示随机一个摄像头拍摄到的第j张被遮挡图像中m个点两两之间的最长直线距离,通过相同方式计算得到c个位置处安装的摄像头拍摄图像的被影响系数集合为u={u1,u2,…,ui,…uc},比较c个位置处安装的摄像头拍摄图像的被影响系数,将摄像头按被影响系数从小到大的顺序进行排列,将排列好的摄像头分为h组,
37、其中,前一组中所有摄像头的被影响系数都小于后一组,获取到随机一个分组结果中,h组中每一组摄像头的被影响系数均值集合为g={g1,g2,…,gh},根据公式计算随机一个分组结果对摄像头安装位置初始化设置的参考系数f,其中,ge表示随机一个分组结果中,h组中第e组摄像头的被影响系数均值,通过相同方式计算不同分组结果对摄像头安装位置初始化设置的参考系数,筛选出参考系数最大的一个分组结果,从筛选出的分组结果中处于第一组内的摄像头中任意选择一个摄像头,将任意选择出的一个摄像头的安装位置作为摄像头的最佳初始化安装位置,在最佳初始化安装位置处安装摄像头拍摄车辆仪表盘图像;
38、利用不同人员驾驶车辆过程中进行仪表盘拍摄测试,在车内的不同位置安装摄像头,在测试过程中对仪表盘进行拍摄,通过大数据技术分析拍摄到的图像因人员出现动作被遮挡住的次数以及预估遮挡区域面积来分析不同位置处安装的摄像头拍摄图像的被影响系数,次数越多、遮挡区域越大,判断对应位置处安装的摄像头拍摄图像的被影响系数越大,利用其拍摄图像越容易出现仪表盘区域被大面积遮挡的问题,通过比较被影响系数,并将摄像头进行分组,选择出被影响系数偏高的摄像头的安装位置作为最佳初始化安装位置的备选,在提高拍摄到完整仪表盘图像概率的基础上提高了安装位置的可选择性。
39、进一步的,在步骤z3中:对采集到的仪表盘图像进行预处理,预处理包括去噪、增强和畸变校正,对经预处理后的图像中的仪表盘区域和其他区域进行分割,利用机器学习对仪表盘区域进行数据识别,识别数据包括里程、油量、水箱温度和故障灯信息,其他区域指的是拍摄到的图像中除仪表盘区域外的区域。
40、进一步的,在步骤z4中:当安装的摄像头在用户驾驶车辆过程中发生故障时,获取故障发生前识别到的汽车里程、油量和水箱温度数据,获取到故障发生前v次识别到的汽车油量集合为s={s1,s2,…,sv},建立关于汽车油量的行车数据预测模型:
41、
42、其中,表示第v+1次汽车油量的预测值,表示第v次识别到的汽车油量指数平滑值,0<δ<1,δ表示平滑系数,根据计算得到第1次识别到的汽车油量指数平滑值根据计算得到第2次识别到的汽车油量指数平滑值根据计算得到第3次识别到的汽车油量指数平滑值依此类推计算得到预测第v次后x次每一次的汽车油量,将预测得到的x次的汽车油量作为关于汽车油量的填充数据,通过相同方式预测第v次后x次每一次的里程和水箱温度,获取关于汽车里程和水箱温度的填充数据,将获取到的所有填充数据填充进入故障发生前识别到的数据记录内。
43、进一步的,在步骤z5中:将填充完成后的识别数据记录传输到监测终端,由监测终端分析识别数据,判断汽车异常状况,判断汽车异常状况例如:若识别数据记录中出现水箱温度高于汽车正常水箱温度时,判断汽车出现异常状况,提醒对出现异常状况的汽车做维护处理;
44、在摄像头出现故障时,对故障前识别到的车辆数据进行大数据分析,建立预测模型,预测行驶的车辆在摄像头故障期间的里程、水箱温度和油量数据,将故障前数据和预测到的数据组成较为完善的识别数据记录发送至监测终端进行分析,判断车辆异常状况,避免了因出现拍摄设备中途故障的问题,导致传输至终端的用于分析的行车数据过少、降低了行车数据的参考价值和分析结果的准确性的问题。
45、与现有技术相比,本发明所达到的有益效果是:
46、本发明利用不同人员驾驶车辆过程中进行仪表盘拍摄测试,在车内的不同位置安装摄像头,在测试过程中对仪表盘进行拍摄,通过大数据技术分析拍摄到的图像因人员出现动作被遮挡住的次数以及预估遮挡区域面积来分析不同位置处安装的摄像头拍摄图像的被影响系数,次数越多、遮挡区域越大,判断对应位置处安装的摄像头拍摄图像的被影响系数越大,利用其拍摄图像越容易出现仪表盘区域被大面积遮挡的问题,通过比较被影响系数,并将摄像头进行分组,选择出被影响系数偏高的摄像头的安装位置作为最佳初始化安装位置的备选,在提高拍摄到完整仪表盘图像概率的基础上提高了安装位置的可选择性;
47、在摄像头出现故障时,对故障前识别到的车辆数据进行大数据分析,建立预测模型,预测行驶的车辆在摄像头故障期间的里程、水箱温度和油量数据,将故障前数据和预测到的数据组成较为完善的识别数据记录发送至监测终端进行分析,判断车辆异常状况,避免了因出现拍摄设备中途故障的问题,导致传输至终端的用于分析的行车数据过少、降低了行车数据的参考价值和分析结果的准确性的问题。
- 还没有人留言评论。精彩留言会获得点赞!