一种基于数字孪生的自助柜员机监控方法、装置及设备与流程
本说明书实施例涉及计算机,尤其一种基于数字孪生的自助柜员机监控方法、装置及设备。
背景技术:
1、随着银行业务数字化转型的开展,以后部分业务通过自助柜员机完成,如何对柜员机的运行状态进行更好的监控,避免故障未能及时解决影响用户体验是一个值得重点关注的问题。
2、自助柜员机是现代银行信息化建设的重要基础设备,这些产品由多层嵌套的零部件装配而成,具有复杂的结构,同时这类产品服役时间长,设备运转压力大,安全健康运行要求极高,若不能及时对自助柜员机的运行状态进行准确的监控,可能导致交易出错造成客户资金损失等影响恶劣的事件。自助柜员机作为典型的机械复杂装备,其模型的设计大多基于专业化的建模软件,如catia、solidworks、archicad、proe等,其设计交付成果为三维模型及导出的二维工程制图,产品属性隐含在模型中,给后续运维阶段的数据共享带来信息壁垒;同时这些基于客户端的模式运行的软件体积庞大、操作流程繁琐,安装和操作都受到硬件设备和专业涉及制图知识的限制,而设备运维工作通常涉及到不同部门不同专业人员的协同合作,因此传统的基于客户端模式的运作方式严重影响运维监控的效率。
3、现在亟需一种基于数字孪生的自助柜员机监控方法,从而解决传统的基于客户端模式的自助柜员机监控方式严重影响运维监控效率的问题。
技术实现思路
1、为解决传统的基于客户端模式的自助柜员机监控方式严重影响运维监控效率的问题,本说明书实施例提供了一种基于数字孪生的自助柜员机监控方法、装置及设备,专业建模软件开放的api提取零部件的设计属性信息,将装配文件的几何数据与属性信息分离,完成导出的三维几何文件在web端的重构工作。
2、为了解决上述技术问题中的任意一种,本说明书实施例的具体技术方案如下:
3、一方面,本说明书实施例提供了一种基于数字孪生的自助柜员机监控方法,包括,
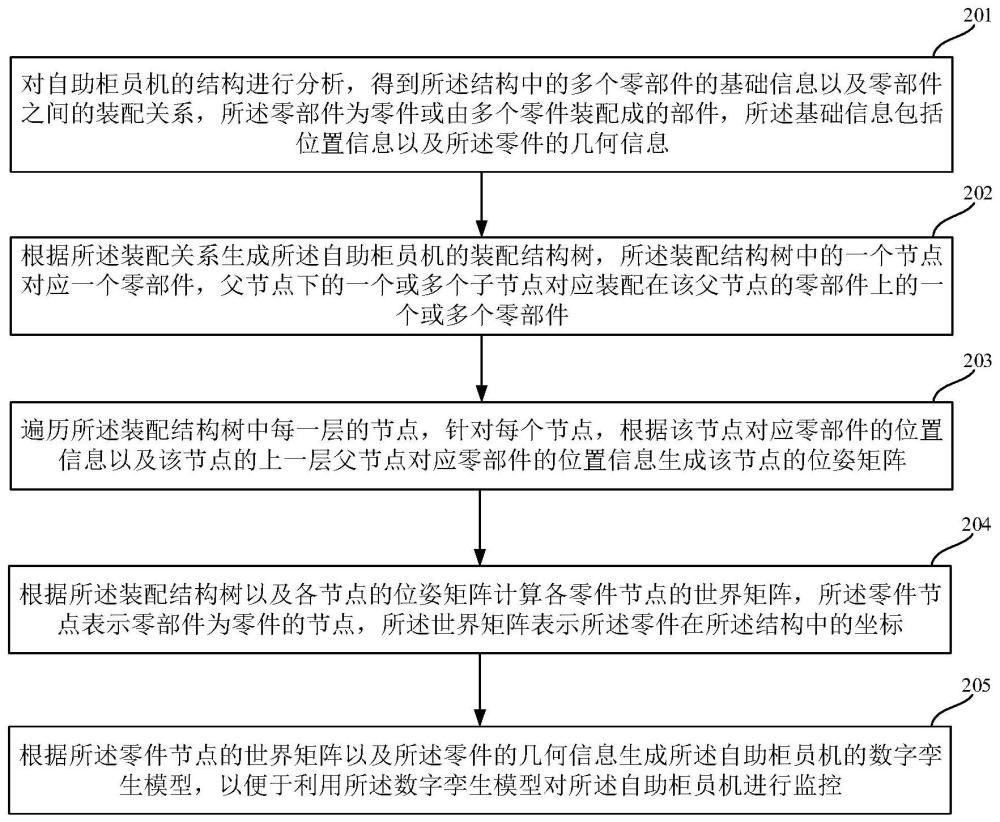
4、对自助柜员机的结构进行分析,得到所述结构中的多个零部件的基础信息以及零部件之间的装配关系,所述零部件为零件或由多个零件装配成的部件,所述基础信息包括位置信息以及所述零件的几何信息;
5、根据所述装配关系生成所述自助柜员机的装配结构树,所述装配结构树中的一个节点对应一个零部件,父节点下的一个或多个子节点对应装配在该父节点的零部件上的一个或多个零部件;
6、遍历所述装配结构树中每一层的节点,针对每个节点,根据该节点对应零部件的位置信息以及该节点的上一层父节点对应零部件的位置信息生成该节点的位姿矩阵;
7、根据所述装配结构树以及各节点的位姿矩阵计算各零件节点的世界矩阵,所述零件节点表示零部件为零件的节点,所述世界矩阵表示所述零件在所述结构中的坐标;
8、根据所述零件节点的世界矩阵以及所述零件的几何信息生成所述自助柜员机的数字孪生模型,以便于利用所述数字孪生模型对所述自助柜员机进行监控。
9、进一步地,所述位姿矩阵为4行3列的矩阵,其中前三行元素中分别为节点对应零部件的绝对坐标系中一个坐标轴相对于其父节点对应零部件的绝对坐标系中每个坐标轴的方向向量,最后一行的元素为节点对应零部件的绝对坐标系的原点在其父节点对应零部件的绝对坐标系中的三维空间坐标。
10、进一步地,所述位姿矩阵的公式为:
11、
12、其中,m(0)~m(11)表示位姿矩阵中的元素,ux、uy、uz分别为节点对应零部件的绝对坐标系中u轴相对于其父节点对应零部件的绝对坐标系中x、y、z轴的方向向量,vx、vy、vz分别为节点对应零部件的绝对坐标系中v轴相对于其父节点对应零部件的绝对坐标系中x、y、z轴的方向向量,wx、wy、wz分别为节点对应零部件的绝对坐标系中w轴相对于其父节点对应零部件的绝对坐标系中x、y、z轴的方向向量,tx、ty、tz分别为节点对应零部件的绝对坐标系的原点t在其父节点对应零部件的绝对坐标系的x、y、z坐标。
13、进一步地,根据所述装配结构树以及各节点的位姿矩阵计算零件节点的世界矩阵进一步包括:
14、对所述节点的位姿矩阵进行齐次化处理,得到所述节点的齐次矩阵;
15、在所述装配结构树中确定所述零件节点的上层父节点,得到父节点列表;
16、按照公式c_worlda=ca×cn×···×c3×c2×c1×croot计算所述零件节点的世界矩阵,其中,c_worlda表示零件节点a的世界矩阵,ca表示零件节点a的齐次矩阵,croot、c1、c2、c3、···、cn分别表示零件节点a的父节点列表中根节点的齐次矩阵、第一层父节点的齐次矩阵、第二层父节点的齐次矩阵、第三层父节点的齐次矩阵、···、第n层父节点的齐次矩阵。
17、进一步地,所述齐次矩阵为4行4列的矩阵,所述齐次矩阵中前三列的元素与位姿矩阵的3列元素相同;
18、对所述节点的位姿矩阵进行齐次化处理,得到所述节点的齐次矩阵进一步包括:
19、若位姿矩阵的某一行元素的坐标为向量坐标,则该行的第四列元素为0;
20、若位姿矩阵的某一行元素的坐标为点坐标,则该行的第四列元素为1。
21、另一方面,本说明书实施例还提供了一种基于数字孪生的自助柜员机监控装置,包括:
22、装配结构分析单元,用于对自助柜员机的结构进行分析,得到所述结构中的多个零部件的基础信息以及零部件之间的装配关系,所述零部件为零件或由多个零件装配成的部件,所述基础信息包括位置信息以及所述零件的几何信息;
23、装配结构树生成单元,用于根据所述装配关系生成所述自助柜员机的装配结构树,所述装配结构树中的一个节点对应一个零部件,父节点下的一个或多个子节点对应装配在该父节点的零部件上的一个或多个零部件;
24、位姿矩阵计算单元,用于遍历所述装配结构树中每一层的节点,针对每个节点,根据该节点对应零部件的位置信息以及该节点的上一层父节点对应零部件的位置信息生成该节点的位姿矩阵;
25、世界矩阵计算单元,用于根据所述装配结构树以及各节点的位姿矩阵计算各零件节点的世界矩阵,所述零件节点表示零部件为零件的节点,所述世界矩阵表示所述零件在所述结构中的坐标;
26、数字孪生模型构建单元,用于根据所述零件节点的世界矩阵以及所述零件的几何信息生成所述自助柜员机的数字孪生模型,以便于利用所述数字孪生模型对所述自助柜员机进行监控。
27、进一步地,所述世界矩阵计算单元进一步包括:
28、齐次矩阵变换模块,用于对所述节点的位姿矩阵进行齐次化处理,得到所述节点的齐次矩阵;
29、父节点列表确定模块,用于在所述装配结构树中确定所述零件节点的上层父节点,得到父节点列表;
30、世界矩阵计算模块,用于按照公式c_worlda=ca×cn×···×c3×c2×c1×croot计算所述零件节点的世界矩阵,其中,c_worlda表示零件节点a的世界矩阵,ca表示零件节点a的齐次矩阵,croot、c1、c2、c3、···、cn分别表示零件节点a的父节点列表中根节点的齐次矩阵、第一层父节点的齐次矩阵、第二层父节点的齐次矩阵、第三层父节点的齐次矩阵、···、第n层父节点的齐次矩阵。
31、进一步地,所述齐次矩阵为4行4列的矩阵,所述齐次矩阵中前三列的元素与位姿矩阵的3列元素相同;
32、所述齐次矩阵变换模块进一步用于:
33、若位姿矩阵的某一行元素的坐标为向量坐标,则该行的第四列元素为0;
34、若位姿矩阵的某一行元素的坐标为点坐标,则该行的第四列元素为1。
35、另一方面,本说明书实施例还提供了一种计算机设备,包括存储器、处理器、以及存储在存储器上的计算机程序,处理器执行所述计算机程序时实现上述的方法。
36、另一方面,本说明书实施例还提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述的方法。
37、最后,本说明书实施例还提供一种计算机程序产品,所述计算机程序产品包括计算机程序,所述计算机程序被处理器执行时实现上述方法。
38、利用本说明书实施例,摒弃了现有技术中通过提取约束关系来获取装配信息,需要进行同轴、共面、同心等位置关系的判定,难以在web端将零件组装成数字孪生模型。本说明书实施例通过计算每一层零部件的位姿矩阵的方式获取零件的位置信息,然后通过零件的坐标转换得到零件的世界矩阵,从而得到各零件的最终装配位置,无需考虑复杂的约束关系判断,降低了计算量。并且本说明书实施例中针对相同零件,存储一份几何信息,从而使得模型文件更加的轻量化,便于数字孪生模型文件在网络中进行传输和在浏览器端进行显示,减轻浏览器的渲染压力,从而提高利用数字孪生模型进行监控的效率。
- 还没有人留言评论。精彩留言会获得点赞!