基于人工智能的可视化门禁控制方法和系统与流程
本申请涉及门禁,特别涉及一种基于人工智能的可视化门禁控制方法和系统。
背景技术:
1、门禁系统顾名思义就是对出入口通道进行管制的系统,它是在传统的门锁基础上发展而来的。
2、可视化门禁系统具备采集图像的摄像头,人工智能技术的发展,可视化门禁系统的非接触式解锁,也即人脸解锁成为主流。
3、目前的可视化门禁系统是基于图像进行人脸识别,在一些光线较差的环境下(例如,环境亮度不足,或者光线是从单一方向射入的情况),导致摄像头采集的图像部分清晰,部分图像亮度、清晰度不足,因此,摄像头采集的图像仅部分区域可被识别,导致可视化门禁系统的人脸识别失败。
技术实现思路
1、本发明的主要目的是提供一种基于人工智能的可视化门禁控制方法和系统,解决可视化门禁系统在光线较差的情况下,容易人脸识别失败的问题。
2、在一实施例中,基于人工智能的可视化门禁控制方法,应用于可视化门禁系统,所述可视化门禁系统包括:摄像头、存储器以及主控制器,所述主控制器分别与所述摄像头、存储器连接,所述摄像头的视场角大于180度,所述主控制器用于:
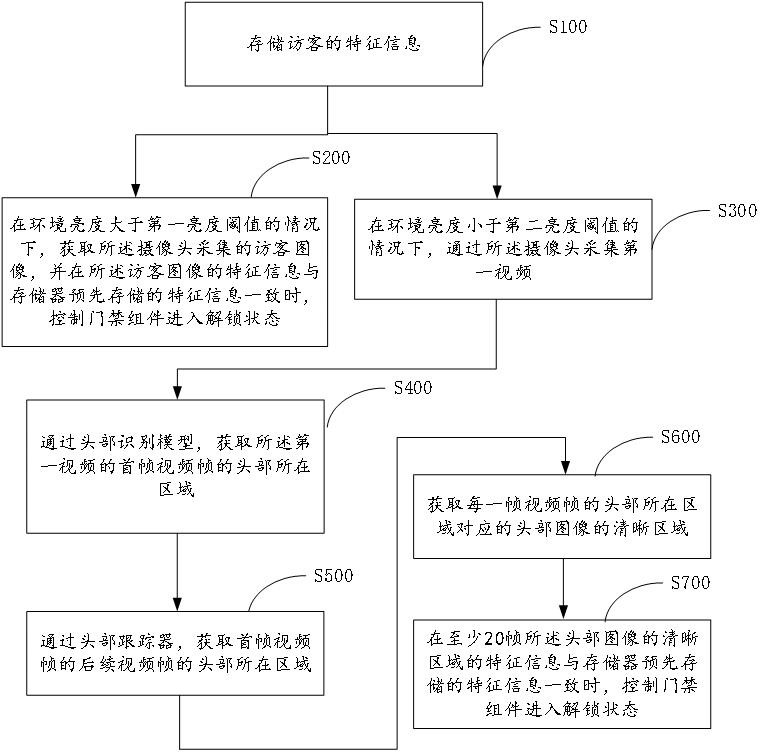
3、存储访客的特征信息;
4、在环境亮度大于第一亮度阈值的情况下,获取摄像头采集的访客图像,并在所述访客图像的特征信息与存储器预先存储的特征信息一致时,控制门禁组件进入解锁状态;
5、在环境亮度小于第二亮度阈值的情况下,通过所述摄像头采集第一视频;所述第二亮度阈值小于或者等于所述第一亮度阈值;
6、通过头部识别模型,获取所述第一视频的首帧视频帧的头部所在区域,其中,所述首帧视频帧为:首帧具备头部所在区域的视频帧;
7、通过头部跟踪器,获取首帧视频帧的后续视频帧的头部所在区域;
8、获取每一帧视频帧的头部所在区域对应的头部图像的清晰区域,包括:将头部图像划分为多个子区域,计算每个子区域的亮度统计值;
9、获取亮度统计值大于第三亮度阈值的子区域,计算特征信息;
10、在至少20帧所述头部图像的清晰区域的特征信息与存储器预先存储的特征信息一致时,控制门禁组件进入解锁状态。
11、在一实施例中,所述20帧所述头部图像的清晰区域,覆盖访客的头部图像的60%区域。
12、在一实施例中,所述可视化门禁系统还包括:补光灯;
13、所述基于人工智能的可视化门禁控制方法还包括:
14、在环境亮度小于第二亮度阈值的情况下,控制所述补光灯工作;
15、通过交互界面引导用户在录制第一视频期间,调整面部朝向,以使得第一视频包含面部的至少2个方向。
16、在一实施例中,所述将头部图像划分为多个子区域,计算每个子区域的清晰度,包括:
17、将头部图像划分为多个子区域等分为n个子区域;或者,基于面部器官,将头部图像划分为多个子区域等分为n个子区域,使得每个区域包含至少一个器官;
18、获取亮度大于第三亮度阈值的子区域,计算特征信息,包括:
19、在亮度统计值大于第三亮度阈值的情况下,确认为目标子区域;
20、将每个目标子区域的图像以及整张头部图像,送入面部识别模型,以获取人脸特征点;
21、获取匹配的特征点之间的欧氏距离以及多个欧氏距离之间的比例关系;
22、将匹配的特征点之间的欧氏距离以及多个欧氏距离之间的比例关系作为特征信息。
23、在一实施例中,所述获取亮度大于第三亮度阈值的子区域,计算特征信息,还包括:
24、将每个目标子区域的图像以及整幅头部图像,送入深度信息计算模型,以计算特征点对应的深度信息,所述深度信息包括:匹配特征点的深度信息之间的三维欧氏距离;
25、将所述深度信息作为特征信息。
26、在一实施例中,所述在至少20帧所述头部图像的清晰区域的特征信息与存储器预先存储的特征信息一致时,控制门禁组件进入解锁状态,包括:
27、依次获取相邻头部图像的光流信息和像素差信息,得到光流图序列和像素差图序列;
28、将时间对应的头部图像、像素差图和光流图同步送入特征提取网络,得到空间特征图并存储;重复此步骤,以得到空间特征图序列;
29、按照时间顺序将所述空间特征图序列送入融合网络,得到时空特征;
30、根据所述时空特征,确认所述第一视频是否包含真实访客。
31、在一实施例中,同一批次送入所述融合网络的空间特征图序列中,仅有一帧空间特征图是实时获取的,剩余的空间特征图为预存储的。
32、在一实施例中,基于人工智能的可视化门禁控制方法还包括:
33、基于交叉熵验证,通过模型输出的:是否包含真实访客的置信度、特征信息的置信度,训练主干网络;其中,所述主干网络包括:并行设置的面部识别模型和所述融合网络。
34、在一实施例中,基于人工智能的可视化门禁控制方法还包括:
35、根据所述像素差信息,获取目标视频帧;所述目标视频帧为:均值最小的连续五张像素差图,对应的视频帧;
36、存储所述目标视频帧,或者将所述目标视频帧发送至外部设备。
37、本申请还提出一种基于人工智能的可视化门禁系统,其特征在于,所述可视化门禁系统包括存储器和主控制器,所述存储器存储有控制程序,所述控制程序被所述主控制器执行时,实现上述基于人工智能的可视化门禁控制方法。
38、本申请通过在环境亮度条件低于第二亮度阈值时,控制摄像头采集第一视频,然后将第一视频的视频帧的头部所在区域划分为多个子区域,再识别清晰的子区域的特征点,最后根据特征点确认访客是否是存储器预先存储授权访客。解决了可视化门禁系统在光线较差的情况下,容易人脸识别失败的问题。
技术特征:
1.一种基于人工智能的可视化门禁控制方法,应用于可视化门禁系统,其特征在于,所述可视化门禁系统包括:摄像头、存储器以及主控制器,所述主控制器分别与所述摄像头、存储器连接,所述摄像头的视场角大于180度,所述主控制器用于:
2.如权利要求1所述的基于人工智能的可视化门禁控制方法,其特征在于,所述20帧所述头部图像的清晰区域,覆盖访客的头部图像的60%区域。
3.如权利要求2所述的基于人工智能的可视化门禁控制方法,其特征在于,所述可视化门禁系统还包括:补光灯;
4.如权利要求3所述的基于人工智能的可视化门禁控制方法,其特征在于,所述将头部图像划分为多个子区域,计算每个子区域的清晰度,包括:
5.如权利要求4所述的基于人工智能的可视化门禁控制方法,其特征在于,所述获取亮度大于第三亮度阈值的子区域,计算特征信息,还包括:
6.如权利要求2所述的基于人工智能的可视化门禁控制方法,其特征在于,所述在至少20帧所述头部图像的清晰区域的特征信息与存储器预先存储的特征信息一致时,控制门禁组件进入解锁状态,包括:
7.如权利要求6所述的基于人工智能的可视化门禁控制方法,其特征在于,同一批次送入所述融合网络的空间特征图序列中,仅有一帧空间特征图是实时获取的,剩余的空间特征图为预存储的。
8.如权利要求7所述的基于人工智能的可视化门禁控制方法,其特征在于,还包括:
9.如权利要求6所述的基于人工智能的可视化门禁控制方法,其特征在于,还包括:
10.一种基于人工智能的可视化门禁系统,其特征在于,包括存储器和主控制器,所述存储器存储有控制程序;
技术总结
本发明公开一种基于人工智能的可视化门禁控制方法和系统,其中,控制方法通过在环境亮度小于第二亮度阈值的情况下,通过摄像头采集第一视频;通过头部识别模型和头部跟踪器,获取每一帧视频帧的头部所在区域;将头部图像划分为多个子区域,计算每个子区域的亮度统计值,得到亮度统计值大于第三亮度阈值的子区域,计算特征信息;在至少20帧头部图像的清晰区域的特征信息与存储器预先存储的特征信息一致时,控制门禁组件进入解锁状态。本发明提高了可视化门禁系统在光线不良的环境下的人脸识别成功率。
技术研发人员:苗志文,刘建昌,夏小辉
受保护的技术使用者:深圳市开拓者安防科技有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!