一种基于多传感器的库位检测方法及相关装置与流程
1.本申请涉及传感技术领域,更具体地说,涉及一种基于多传感器的库位检测方法及相关装置。
背景技术:
2.随着近几年自动驾驶技术的飞速发展,行业内的各企业正尝试着开发代客泊车系统,推进自动驾驶技术的商业化落地。
3.目前市面上销售的代客泊车系统,均为自动泊车,属于adas(高级驾驶辅助系统,advanced driving assistance system)领域。即感知到车位后,需要驾驶员判断能不能停,得到肯定答案后,再按照预先设置好的程序完成停车动作。
4.如何基于传感器技术实现自动的库位识别,是本领域技术人员的研究方向之一。
技术实现要素:
5.为解决上述技术问题,本申请提供了一种基于多传感器的库位检测方法及相关装置,以实现提供一种能够准确识别库位的库位检测方法的目的。
6.为实现上述技术目的,本申请实施例提供了如下技术方案:
7.一种基于多传感器的库位检测方法,用于获取机动车辆所处环境的库位状态,所述基于多传感器的库位检测方法包括:
8.基于多个传感器的环境感知数据和先验位置信息,获取所述机动车辆所处环境的库位位置信息;所述多个传感器至少包括两种以上不同种类的传感器,每种所述传感器的数量大于或等于1;
9.基于所述多个传感器的环境感知数据和预先设置的各类传感器不同感知区域的置信度,对所述多个传感器的环境感知数据进行融合,以获取所述机动车辆所处环境的多帧栅格地图,所述栅格地图中的每个栅格标记有表征所述栅格是否可通行的标记信息;
10.根据多帧所述栅格地图,判断所述库位位置信息对应的库位是否被占用。
11.可选的,所述基于多个传感器的环境感知数据和先验位置信息,获取所述机动车辆所处环境的库位位置信息包括:
12.基于多个传感器的环境感知数据,获取所述机动车辆所处环境的库位感知位置;
13.基于所述先验位置信息,获取与所述库位感知位置对应的库位先验位置;
14.根据所述库位先验位置对所述库位感知位置进行校正,以获取所述库位位置信息。
15.可选的,所述基于所述多个传感器的环境感知数据和预先设置的各类传感器不同感知区域的置信度,对所述多个传感器的环境感知数据进行融合,以获取所述机动车辆所处环境的多帧栅格地图包括:
16.将所述机动车辆所处环境划分为多个栅格,比较不同传感器在所述栅格所在位置处的置信度,将置信度高的传感器的环境感知数据作为所述栅格的环境感知数据,并基于
二值贝叶斯算法对所述栅格的环境感知数据进行二值化处理,以获取所述机动车辆所处环境的多帧栅格地图。
17.可选的,所述根据多帧所述栅格地图,判断所述库位位置信息对应的库位是否被占用包括:
18.将多个多帧所述栅格地图分组,并将第一组栅格地图作为待处理对象;
19.根据所述待处理对象中的第一帧栅格地图建立感兴趣区域;
20.在所述感兴趣区域中建立高斯模型,并对所述感兴趣区域中不同位置的环境感知数据进行高斯加权,以获得所述感兴趣区域中不同位置的高斯权值;
21.根据所述感兴趣区域中不同位置的高斯权值计算所述库位位置信息对应的库位被占用的概率和未被占用的概率,基于所述第二组栅格地图中的其他栅格地图,利用二值贝叶斯滤波算法,对所述被占用的概率和未被占用的概率进行更新;
22.判断是否可以根据更新后的被占用的概率和未被占用的概率得出所述库位位置信息对应的库位是否被占用的结论,如果是,则根据更新后的被占用的概率和未被占用的概率得出所述库位位置信息对应的库位是否被占用,如果否,则将下一组栅格地图作为所述待处理对象,并返回根据所述待处理对象中的第一帧栅格地图建立感兴趣区域的步骤。
23.可选的,所述在所述感兴趣区域中建立高斯模型,并对所述感兴趣区域中不同位置的环境感知数据进行高斯加权,以获得所述感兴趣区域中不同位置的高斯权值包括:
24.以所述感兴趣区域中心为总体均值,三倍标准差为方差建立高斯模型;
25.对落在所述感兴趣区域中的栅格,根据所述栅格在所述高斯模型中的权重进行积分,以获得所述感兴趣区域中不同栅格的高斯权值。
26.可选的,所述根据所述感兴趣区域中不同位置的高斯权值计算所述库位位置信息对应的库位被占用的概率和未被占用的概率包括:
27.根据所述感兴趣区域中所有栅格的高斯权值,计算所述库位位置信息对应的库位被占用的概率和未被占用的概率。
28.可选的,所述判断是否可以根据更新后的被占用的概率和未被占用的概率得出所述库位位置信息对应的库位是否被占用的结论包括:
29.判断更新后的被占用的概率是否大于更新后的未被占用的概率,且更新后的被占用的概率与更新后的未被占用的概率的差值是否大于预设阈值,如果是,则判定所述库位位置信息对应的库位未被占用;
30.如果否,则判断更新后的被占用的概率是否小于更新后的未被占用的概率,且更新后的被占用的概率与更新后的未被占用的概率的差值是否大于所述预设阈值,若是,则判定所述库位位置信息对应的库位被占用,若否,则放弃当前库位位置信息对应的库位或返回基于多个传感器的环境感知数据和先验位置信息,获取所述机动车辆所处环境的库位位置信息的步骤。
31.一种基于多传感器的库位检测系统,用于获取机动车辆所处环境的库位状态,所述基于多传感器的库位检测方法包括:
32.位置获取模块,用于基于多个传感器的环境感知数据和先验位置信息,获取所述机动车辆所处环境的库位位置信息;所述多个传感器至少包括两种以上不同种类的传感器,每种所述传感器的数量大于或等于1;
33.库位融合模块,用于基于所述多个传感器的环境感知数据和预先设置的各类传感器不同感知区域的置信度,对所述多个传感器的环境感知数据进行融合,以获取所述机动车辆所处环境的多帧栅格地图,所述栅格地图中的每个栅格标记有表征所述栅格是否可通行的标记信息;
34.库位判断模块,用于根据多帧所述栅格地图,判断所述库位位置信息对应的库位是否被占用。
35.可选的,所述位置获取模块具体用于,基于多个传感器的环境感知数据,获取所述机动车辆所处环境的库位感知位置;
36.基于所述先验位置信息,获取与所述库位感知位置对应的库位先验位置;
37.根据所述库位先验位置对所述库位感知位置进行校正,以获取所述库位位置信息。
38.可选的,所述库位融合模块具体用于,将所述机动车辆所处环境划分为多个栅格,比较不同传感器在所述栅格所在位置处的置信度,将置信度高的传感器的环境感知数据作为所述栅格的环境感知数据,并基于二值贝叶斯算法对所述栅格的环境感知数据进行二值化处理,以获取所述机动车辆所处环境的多帧栅格地图。
39.可选的,所述库位判断模块具体用于,将多个多帧所述栅格地图分组,并将第一组栅格地图作为待处理对象;
40.根据所述待处理对象中的第一帧栅格地图建立感兴趣区域;
41.在所述感兴趣区域中建立高斯模型,并对所述感兴趣区域中不同位置的环境感知数据进行高斯加权,以获得所述感兴趣区域中不同位置的高斯权值;
42.根据所述感兴趣区域中不同位置的高斯权值计算所述库位位置信息对应的库位被占用的概率和未被占用的概率,基于所述第二组栅格地图中的其他栅格地图,利用二值贝叶斯滤波算法,对所述被占用的概率和未被占用的概率进行更新;
43.判断是否可以根据更新后的被占用的概率和未被占用的概率得出所述库位位置信息对应的库位是否被占用的结论,如果是,则根据更新后的被占用的概率和未被占用的概率得出所述库位位置信息对应的库位是否被占用,如果否,则将下一组栅格地图作为所述待处理对象,并返回根据所述待处理对象中的第一帧栅格地图建立感兴趣区域的步骤。
44.可选的,所述库位判断模块在所述感兴趣区域中建立高斯模型,并对所述感兴趣区域中不同位置的环境感知数据进行高斯加权,以获得所述感兴趣区域中不同位置的高斯权值具体用于,以所述感兴趣区域中心为总体均值,三倍标准差为方差建立高斯模型;
45.对落在所述感兴趣区域中的栅格,根据所述栅格在所述高斯模型中的权重进行积分,以获得所述感兴趣区域中不同栅格的高斯权值。
46.可选的,所述库位判断模块根据所述感兴趣区域中不同位置的高斯权值计算所述库位位置信息对应的库位被占用的概率和未被占用的概率具体用于,根据所述感兴趣区域中所有栅格的高斯权值,计算所述库位位置信息对应的库位被占用的概率和未被占用的概率。
47.可选的,所述库位判断模块判断是否可以根据更新后的被占用的概率和未被占用的概率得出所述库位位置信息对应的库位是否被占用的结论具体用于,判断更新后的被占用的概率是否大于更新后的未被占用的概率,且更新后的被占用的概率与更新后的未被占
用的概率的差值是否大于预设阈值,如果是,则判定所述库位位置信息对应的库位未被占用;
48.如果否,则判断更新后的被占用的概率是否小于更新后的未被占用的概率,且更新后的被占用的概率与更新后的未被占用的概率的差值是否大于所述预设阈值,若是,则判定所述库位位置信息对应的库位被占用,若否,则放弃当前库位位置信息对应的库位或返回触发所述位置获取模块。
49.一种基于多传感器的库位检测系统,包括:存储器和处理器;
50.所述存储器用于存储程序代码,所述处理器用于调用所述程序代码,所述程序代码用于执行上述任一项所述的基于多传感器的库位检测方法。
51.一种存储介质,所述存储介质上存储有程序代码,所述程序代码被执行时实现上述任一项所述的基于多传感器的库位检测方法。
52.从上述技术方案可以看出,本申请实施例提供了一种基于多传感器的库位检测方法及相关装置,其中,所述基于多传感器的库位检测方法融合多种传感器的环境感知数据,对机动车辆周围的库位状态进行精确检测,具体地,首先基于多个传感器的环境感知数据和先验位置信息,获取所述机动车辆所处环境的库位位置信息,提高库位位置信息的检测精度,然后基于所述多个传感器的环境感知数据和预先设置的各类传感器不同感知区域的置信度,对所述多个传感器的环境感知数据进行融合,以获取所述机动车辆所处环境的多帧栅格地图,避免单一类型传感器对距离机动车辆不同距离处的环境信息的传感数据误差较大的问题,最后根据多帧所述栅格地图,判断所述库位位置信息对应的库位是否被占用,实现精确、可靠的库位检测的目的。
附图说明
53.为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
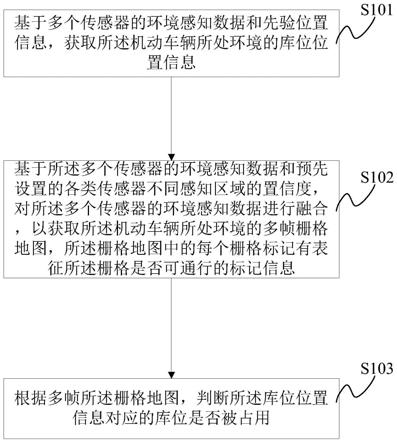
54.图1为本申请的一个实施例提供的一种基于多传感器的库位检测方法的流程示意图;
55.图2为本申请的另一个实施例提供的一种基于多传感器的库位检测方法的流程示意图;
56.图3为本申请的又一个实施例提供的一种基于多传感器的库位检测方法的流程示意图;
57.图4为本申请的再一个实施例提供的一种基于多传感器的库位检测方法的流程示意图;
58.图5为本申请的一个可选实施例提供的一种基于多传感器的库位检测方法的流程示意图。
具体实施方式
59.下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完
整地描述,显然,所描述的实施例仅仅是本申请一部分实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
60.本申请的一个实施例提供了一种基于多传感器的库位检测方法,如图1所示,用于获取机动车辆所处环境的库位状态,所述基于多传感器的库位检测方法包括:
61.s101:基于多个传感器的环境感知数据和先验位置信息,获取所述机动车辆所处环境的库位位置信息;所述多个传感器至少包括两种以上不同种类的传感器,每种所述传感器的数量大于或等于1;
62.s102:基于所述多个传感器的环境感知数据和预先设置的各类传感器不同感知区域的置信度,对所述多个传感器的环境感知数据进行融合,以获取所述机动车辆所处环境的多帧栅格地图,所述栅格地图中的每个栅格标记有表征所述栅格是否可通行的标记信息;
63.s103:根据多帧所述栅格地图,判断所述库位位置信息对应的库位是否被占用。
64.在本实施例中,所述多个传感器至少包括超声波传感器、激光雷达传感器、单目相机和环视相机中的两种。每种所述传感器的数量大于或等于1,同一种类的传感器一般分布于机动车辆车身的不同位置,机动车辆车身的同一位置也可以设置两个或两个以上的同一种类传感器,这些同一位置处的同一种类传感器的传感数据可以进行彼此修正或取均值处理后作为该位置处该种类型的传感器的环境感知数据。
65.所述先验位置信息可以是指从高精度地图中或者车联网数据中获取的库位信息。
66.由于不同传感器的有效工作范围、精度、检测成功率均不同,因此需要事先对传感器的检测结果进行大量数据统计和人工标注,标记出各检测区域、各传感器的置信度,并在步骤s102中对多个传感器的环境感知数据进行融合,以消除各种类型的传感器对于距离机动车辆某些距离处的环境感知数据的传感精度较低的问题。
67.栅格地图的具体建立方式可以包括:是以车体后轴中心为原点,以一定的分辨率对自车附件区域进行栅格划分,对每一个点,都可根据到车体后轴中心的位置计算出对应的栅格位置。
68.下面对本申请实施例提供的基于多传感器的库位检测方法的各个步骤的可行执行方法进行描述。
69.在上述实施例的基础上,在本申请的一个实施例中,如图2所示,所述基于多个传感器的环境感知数据和先验位置信息,获取所述机动车辆所处环境的库位位置信息包括:
70.s1011:基于多个传感器的环境感知数据,获取所述机动车辆所处环境的库位感知位置;
71.s1012:基于所述先验位置信息,获取与所述库位感知位置对应的库位先验位置;
72.s1013:根据所述库位先验位置对所述库位感知位置进行校正,以获取所述库位位置信息。
73.在步骤s1011中,基于多个传感器的环境感知数据,获取所述机动车辆所处环境的库位感知位置可以是基于一种传感器的环境感知数据,获取所述机动车辆所处环境的库位感知位置,也可以是基于多种传感器的环境感知数据,根据各类传感器在不同区域的置信度,确定各个区域的环境感知数据,并将这些区域的环境感知数据整合,获取所述机动车辆
所处环境的库位感知位置。
74.在步骤s1013中,所述根据所述库位先验位置对所述库位感知位置进行校正,以获取所述库位位置信息可以具体包括:
75.首先从高精度地图中获取停车位位置信息(先验位置信息),跟检测到的库位(库位感知位置)进行重合度计算。采用计算任意凸多边形相交/相并的算法,两个矩形(地图中的停车位(先验位置信息)和视觉/超声波检测到的库位(库位感知位置))的相交面积除以相并面积,即为重合度。若该重合度超过一定阈值,则认为检测正确,否则需要对库位感知位置进行补齐或裁切,解决虚警和漏检问题。
76.在上述实施例的基础上,在本申请的另一个实施例中,如图3所示,所述基于所述多个传感器的环境感知数据和预先设置的各类传感器不同感知区域的置信度,对所述多个传感器的环境感知数据进行融合,以获取所述机动车辆所处环境的多帧栅格地图包括:
77.s1021:将所述机动车辆所处环境划分为多个栅格,比较不同传感器在所述栅格所在位置处的置信度,将置信度高的传感器的环境感知数据作为所述栅格的环境感知数据,并基于二值贝叶斯算法对所述栅格的环境感知数据进行二值化处理,以获取所述机动车辆所处环境的多帧栅格地图。
78.以激光雷达传感器为例,激光雷达传感器在扫描过程中,光线撞倒(hit)的地方所处坐标位置就对应一种灰度值,没有撞倒(miss)的地方所处坐标位置对应另外的灰度值(这就是二值化过程)。
79.在栅格地图中,一个栅格某一时刻只有两种状态,要么被光线撞到了,要么没有,但是该栅格可能多次被撞倒或多次没被撞倒。如果某个栅格多次被撞倒了,说明它很可能是被占用了(即有障碍物,不可通行)。因此,可以用概率的方式来表示某个栅格有多大的可能被占用了,这是步骤s103所要解决的问题。
80.可选的,参考图4,所述根据多帧所述栅格地图,判断所述库位位置信息对应的库位是否被占用包括:
81.s1031:将多个多帧所述栅格地图分组,并将第一组栅格地图作为待处理对象;
82.s1032:根据所述待处理对象中的第一帧栅格地图建立感兴趣区域;
83.s1033:在所述感兴趣区域中建立高斯模型,并对所述感兴趣区域中不同位置的环境感知数据进行高斯加权,以获得所述感兴趣区域中不同位置的高斯权值;
84.s1034:根据所述感兴趣区域中不同位置的高斯权值计算所述库位位置信息对应的库位被占用的概率和未被占用的概率,基于所述第二组栅格地图中的其他栅格地图,利用二值贝叶斯滤波算法,对所述被占用的概率和未被占用的概率进行更新;
85.s1035:判断是否可以根据更新后的被占用的概率和未被占用的概率得出所述库位位置信息对应的库位是否被占用的结论,如果是,则根据更新后的被占用的概率和未被占用的概率得出所述库位位置信息对应的库位是否被占用,如果否,则将下一组栅格地图作为所述待处理对象,并返回根据所述待处理对象中的第一帧栅格地图建立感兴趣区域的步骤。
86.在步骤1034中,在实际环境中,库位只有两种状态,要么occupied,要么free。假设检测存在一定概率的误差,如表1:
87.表1检测为occupied和free的置信度分布
[0088] occupied为真,即p
o
(x)free为真,即p
f
(x)检测为occupied(被占用)0.90.1检测为free(未被占用)0.20.8
[0089]
用概率对数的形式描述库位被occupied概率,初值为:
[0090][0091]
迭代更新过程为:
[0092][0093]
对l
t
(x)求指数则为p
occupied
。同样的方法可用于迭代计算库位为free的概率p
free
。
[0094]
其中,lo(x)代表初始时刻库位被占用的概率,p(x)为步骤s1034中计算获得的概率。lt(x)代表t时刻库位被判断为occupied的后验概率,p(x|z
t
),代表基于t时刻检测结果判断库位为occupied的概率,p(x|z
1:t-1
),代表基于1:t-1时刻检测结果判断库位为occupied的概率。
[0095]
可选的,参考图5,所述在所述感兴趣区域中建立高斯模型,并对所述感兴趣区域中不同位置的环境感知数据进行高斯加权,以获得所述感兴趣区域中不同位置的高斯权值包括:
[0096]
s10331:以所述感兴趣区域中心为总体均值,三倍标准差为方差建立高斯模型;
[0097]
s10332:对落在所述感兴趣区域中的栅格,根据所述栅格在所述高斯模型中的权重进行积分,以获得所述感兴趣区域中不同栅格的高斯权值。
[0098]
感兴趣区域(region of interest,roi)是指从栅格地图中勾勒出来的需要处理的区域。在roi内,以roi中心坐标为总体均值μ、3σ(标准差)为方差建立高斯模型,对roi内不同位置的环境感知数据进行高斯加权。在高斯模型中,99.73%的取值集中在(μ-3σ,μ+3σ)区间内,因此可以认为该roi覆盖了整个库位区域。根据目标库位内不同位置的高斯权值,计算出停车位空间被占据的面积比例。若该比例值超过一定阈值,则判断该库位在当前帧为“occupied(被占用)”,否则为“free(未被占用)”。
[0099]
所述栅格在所述高斯模型中的权重可根据栅格到roi中心点的距离计算得到的高斯权值即为栅格权重
[0100]
相应的,步骤s1035具体包括:
[0101]
s10351:判断更新后的被占用的概率是否大于更新后的未被占用的概率,且更新后的被占用的概率与更新后的未被占用的概率的差值是否大于预设阈值,如果是,则判定所述库位位置信息对应的库位未被占用;
[0102]
如果否,则判断更新后的被占用的概率是否小于更新后的未被占用的概率,且更新后的被占用的概率与更新后的未被占用的概率的差值是否大于所述预设阈值,若是,则判定所述库位位置信息对应的库位被占用,若否,则放弃当前库位位置信息对应的库位或返回基于多个传感器的环境感知数据和先验位置信息,获取所述机动车辆所处环境的库位位置信息的步骤。
[0103]
下面对本申请实施例提供的基于多传感器的库位检测系统进行描述,下文描述的基于多传感器的库位检测系统可与上文描述的基于多传感器的库位检测方法相互对应参照。
[0104]
相应的,本申请实施例提供了一种基于多传感器的库位检测系统,用于获取机动车辆所处环境的库位状态,所述基于多传感器的库位检测方法包括:
[0105]
位置获取模块,用于基于多个传感器的环境感知数据和先验位置信息,获取所述机动车辆所处环境的库位位置信息;所述多个传感器至少包括两种以上不同种类的传感器,每种所述传感器的数量大于或等于1;
[0106]
库位融合模块,用于基于所述多个传感器的环境感知数据和预先设置的各类传感器不同感知区域的置信度,对所述多个传感器的环境感知数据进行融合,以获取所述机动车辆所处环境的多帧栅格地图,所述栅格地图中的每个栅格标记有表征所述栅格是否可通行的标记信息;
[0107]
库位判断模块,用于根据多帧所述栅格地图,判断所述库位位置信息对应的库位是否被占用。
[0108]
可选的,所述位置获取模块具体用于,基于多个传感器的环境感知数据,获取所述机动车辆所处环境的库位感知位置;
[0109]
基于所述先验位置信息,获取与所述库位感知位置对应的库位先验位置;
[0110]
根据所述库位先验位置对所述库位感知位置进行校正,以获取所述库位位置信息。
[0111]
可选的,所述库位融合模块具体用于,将所述机动车辆所处环境划分为多个栅格,比较不同传感器在所述栅格所在位置处的置信度,将置信度高的传感器的环境感知数据作为所述栅格的环境感知数据,并基于二值贝叶斯算法对所述栅格的环境感知数据进行二值化处理,以获取所述机动车辆所处环境的多帧栅格地图。
[0112]
可选的,所述库位判断模块具体用于,将多个多帧所述栅格地图分组,并将第一组栅格地图作为待处理对象;
[0113]
根据所述待处理对象中的第一帧栅格地图建立感兴趣区域;
[0114]
在所述感兴趣区域中建立高斯模型,并对所述感兴趣区域中不同位置的环境感知数据进行高斯加权,以获得所述感兴趣区域中不同位置的高斯权值;
[0115]
根据所述感兴趣区域中不同位置的高斯权值计算所述库位位置信息对应的库位被占用的概率和未被占用的概率,基于所述第二组栅格地图中的其他栅格地图,利用二值贝叶斯滤波算法,对所述被占用的概率和未被占用的概率进行更新;
[0116]
判断是否可以根据更新后的被占用的概率和未被占用的概率得出所述库位位置信息对应的库位是否被占用的结论,如果是,则根据更新后的被占用的概率和未被占用的概率得出所述库位位置信息对应的库位是否被占用,如果否,则将下一组栅格地图作为所述待处理对象,并返回根据所述待处理对象中的第一帧栅格地图建立感兴趣区域的步骤。
[0117]
可选的,所述库位判断模块在所述感兴趣区域中建立高斯模型,并对所述感兴趣区域中不同位置的环境感知数据进行高斯加权,以获得所述感兴趣区域中不同位置的高斯权值具体用于,以所述感兴趣区域中心为总体均值,三倍标准差为方差建立高斯模型;
[0118]
对落在所述感兴趣区域中的栅格,根据所述栅格在所述高斯模型中的权重进行积
分,以获得所述感兴趣区域中不同栅格的高斯权值。
[0119]
可选的,所述库位判断模块根据所述感兴趣区域中不同位置的高斯权值计算所述库位位置信息对应的库位被占用的概率和未被占用的概率具体用于,根据所述感兴趣区域中所有栅格的高斯权值,计算所述库位位置信息对应的库位被占用的概率和未被占用的概率。
[0120]
可选的,所述库位判断模块判断是否可以根据更新后的被占用的概率和未被占用的概率得出所述库位位置信息对应的库位是否被占用的结论具体用于,判断更新后的被占用的概率是否大于更新后的未被占用的概率,且更新后的被占用的概率与更新后的未被占用的概率的差值是否大于预设阈值,如果是,则判定所述库位位置信息对应的库位未被占用;
[0121]
如果否,则判断更新后的被占用的概率是否小于更新后的未被占用的概率,且更新后的被占用的概率与更新后的未被占用的概率的差值是否大于所述预设阈值,若是,则判定所述库位位置信息对应的库位被占用,若否,则放弃当前库位位置信息对应的库位或返回触发所述位置获取模块。
[0122]
相应的,本申请实施例还提供了一种基于多传感器的库位检测系统,包括:存储器和处理器;
[0123]
所述存储器用于存储程序代码,所述处理器用于调用所述程序代码,所述程序代码用于执行上述任一实施例所述的基于多传感器的库位检测方法。
[0124]
相应的,本申请实施例还提供了一种存储介质,所述存储介质上存储有程序代码,所述程序代码被执行时实现上述任一实施例所述的基于多传感器的库位检测方法。
[0125]
综上所述,本申请实施例提供了一种基于多传感器的库位检测方法及相关装置,其中,所述基于多传感器的库位检测方法融合多种传感器的环境感知数据,对机动车辆周围的库位状态进行精确检测,具体地,首先基于多个传感器的环境感知数据和先验位置信息,获取所述机动车辆所处环境的库位位置信息,提高库位位置信息的检测精度,然后基于所述多个传感器的环境感知数据和预先设置的各类传感器不同感知区域的置信度,对所述多个传感器的环境感知数据进行融合,以获取所述机动车辆所处环境的多帧栅格地图,避免单一类型传感器对距离机动车辆不同距离处的环境信息的传感数据误差较大的问题,最后根据多帧所述栅格地图,判断所述库位位置信息对应的库位是否被占用,实现精确、可靠的库位检测的目的。
[0126]
本说明书中各实施例中记载的特征可以相互替换或者组合,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
[0127]
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本申请。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本申请的精神或范围的情况下,在其它实施例中实现。因此,本申请将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1