一种有信号灯参与的双车道环岛路口交通流预测方法
1.本发明涉及交通控制技术领域,更具体的是,本发明涉及一种有信号灯参与的双车道环岛路口交通流预测方法。
背景技术:
2.随着当今社会经济的发展,汽车保有量的不断提高,交通设施建设相对迟缓与汽车保有量迅速增加的矛盾日益突出,交通堵塞问题日益严重。尤其在环岛交通中,由于随着汽车保有量和交通流量的不断上升,大多数环岛交通的容量已经不能满足车辆运行的需求,从而导致了严重的拥堵问题。在环岛交通中,交通流运行特征复杂,并且随着交通信号灯引入环岛交通,更加剧了这种复杂性,使得有信号灯参与的环岛路口交通流建模变得较困难。
3.由于环岛建设的影响巨大和用交通灯来调节环岛交通流的现象与日俱增,而当今对于环岛路口交通流预测的研究相对较少,且大多数集中于单车道无信号灯参与的环岛路口交通流模型,几乎没有对于有信号灯参与的双车道环岛路口交通流预测的研究。随着城市中环岛路口信号灯的不断增加和引入,对有信号灯参与的环岛路口交通流预测的建立已经迫在眉睫。
技术实现要素:
4.本发明设计开发了一种有信号灯参与的双车道环岛路口交通流预测方法,根据环岛中车流量的状况采用不同的换道规则,从而获得某个时间段内,环岛内行驶车辆的速度值,减小能量管理的可行域,提高计算效率。
5.本发明提供的技术方案为:
6.一种有信号灯参与的双车道环岛路口交通流预测方法,包括如下步骤:
7.步骤一、将双车道环岛路口划分成元胞空间并建立坐标系;
8.步骤二、将车辆进行标记,建立有信号灯参与的随机分布车辆到达模型;
9.步骤三、将行进规则、换道规则、交通流参数和所述随机分布车辆到达模型引入元胞自动机模型,对交通流进行预测;
10.所述换道规则为:
11.在自由流状态下,若行驶目的为右转的车辆沿外环道进入环岛路口,且所述车辆沿着外环道驶出环岛并进入相邻入口的右侧车道;
12.若行驶目的为直行或左转的车辆沿外环道进入环岛路口,朝着其行驶方向的相邻内侧元胞换道,在所述车辆准备离开环岛路口时,所述车辆沿着出口车道右车道的出切线段向外换道驶出环岛并进入相邻入口的右侧车道;
13.在拥挤车流状态下,若行驶目的为右转的车辆沿外环道进入环岛路口,且所述车辆沿着外环道驶出环岛,若因车流拥挤无法从右侧车道驶出,则所述车辆最迟不超过出口处左侧车道相邻元胞驶出环岛,并进入相邻入口的右侧车道;
14.若行驶目的为直行或左转的车辆沿外环道进入环岛路口,当所述车辆未到达理想向内换道元胞时,不进行换道;
15.当所述车辆到达或者越过理想向内换道元胞后且相邻内侧元胞为空时,进行换道,若相邻内侧元胞一直未被占据,则所述车辆直接沿外环道行驶并由出口右侧车道驶出环岛;
16.在所述车辆驶出环岛时,所述车辆的最晚向外换道点不能超过最迟向外换道元胞,若所述车辆行驶到最迟向外换道元胞时还未向外换道,则所述车辆原地等待外侧车道的邻居元胞空出时再进行换道。
17.优选的是,所述步骤一中的元胞空间为二维元胞空间,并且所述元胞为六边形元胞,所述元胞的个数为6n个。
18.优选的是,所述元胞的宽为5.6米,所述元胞的高为6.5米,所述环岛直径为5.6z米;
19.所述元胞的最大瞬时速度满足:
20.v
max
=v
m
/5;
21.式中,v
max
为元胞的最大瞬时速度,且所述元胞的最大瞬时速度为整数值,v
m
为最大车速;
22.所述元胞具有两个邻居元胞;
23.所述元胞为周期型边界条件。
24.优选的是,所述建立坐标系具体包括:
25.在所述元胞空间中采用倾角为60
°
的斜坐标系,所述斜坐标系中的单位向量满足:
[0026][0027]
式中,u,v为斜坐标系中的单位向量,w为元胞的宽度,h为元胞的高度,且w=0.866h。
[0028]
优选的是,所述交通流参数包括:
[0029][0030]
式中,q
c
为流量,n为t时间内通过交织区某一断面的车辆数,x
t
为t时刻一个时间步内经过某一断面处的车辆数;
[0031][0032]
式中,平均速度,n
max
为元胞系统直角坐标系中横纵坐标的最大值,ca
nun
为t时刻环道内不为空的元胞数;
[0033][0034]
式中,为平均密度,ca
max
为环道元胞总数。
[0035]
优选的是,所述元胞空间中环岛路口的通行能力满足:
[0036][0037]
式中,q
m
为交织段上的最大通行能力,l为交织段长度,w为交织段宽度,e为环形交叉入口引道平均宽度,z为交织段内进行交织的车辆与全部车辆之比;
[0038]
其中,所述环形交叉入口引道平均宽度满足:
[0039]
e=(e1+e2)/2(m);
[0040]
式中,e1为入口引道宽度,e2为环道突出部分宽度。
[0041]
优选的是,所述元胞自动机模型中的车辆排队状态转移矩阵为:
[0042][0043]
式中,p
ij
为车辆排队状态转移矩阵,p
ic
为当排队长度达到最大时的车辆状态转移矩阵,v
amax
为有效绿灯时间内通过某一个路口进入环岛的最大车辆数,i为当前红灯结束时的排队长度,j为一个周期后转移到排队长度,c为允许排队车辆数的最大值,m为到达入口车道的车辆数,p
gam
为绿灯时间内到达入口车道的车辆数为m的概率,p
yraj
为红灯与黄灯时间内到达入口车道的车辆数为j的概率;p
yrac
红灯与黄灯时间内到达入口车道的车辆数为c的概率;
[0044]
其中,有效绿灯时间内通过某一个路口进入环岛的最大车辆数满足:
[0045][0046]
式中,t
g
+t
y
‑
t
lose
为有效绿灯时间,1/h为各车道的饱和流率。
[0047]
优选的是,所述行进规则包括:
[0048]
a.加速:v
(i,j)
(t)=min{v
(i,j)
(t
‑
1)+1,v
max
};
[0049]
b.减速:v
(i,j)
(t)=min{v
(i,j)
(t)+1,d
(i,j)
‑
1};
[0050]
c.随机慢化:若ξ(t)<p,则v
(i,j)
(t)=max{v
(i,j)
(t)
‑
1,0};
[0051]
d.运动:x
(i,j)
(t)=x
(i,j)
(t
‑
1),v
(i,j)
(t)};
[0052]
式中,v
(i,j)
(t)为元胞(i,j)在时刻t的速度,d
(i,j)
为元胞(i,j)与前车的车头间距,p为随机慢化概率,x
(i,j)
(t)为元胞(i,j)在时刻t的位置,ξ(t)为时刻t的随机数,且ξ(t)∈[0,1]。
[0053]
优选的是,所述元胞自动机模型的基本换道规则为:
[0054][0055]
式中,d
n
为第n辆车与前方车辆的间距,d
n,other
为第n辆车与相邻车道前方车辆的间距,d
n,back
为第n辆车与相邻车道后方车辆的间距,d
safe
为安全换道间距,d
safe
=v
max
,c
n
为第n辆车所在车道,且c
n
=1或c
n
=0,d
n
<min{v
n+1
,v
max
}表示第n辆车在原车道受到阻挡,d
n,other
>d
n
表示受阻车辆在另一车道上能够达到更快的速度,d
n,back
>d
saf
表示若所述受阻车辆换道且符合安全换道间距,则在另一条车道上后方的车辆与所述受阻车辆存在安全距离。
[0056]
本发明所述的有益效果:
[0057]
本发明提供的有信号灯参与的双车道环岛路口交通流预测方法,根据环岛中车流量的状况采用不同的换道规则,从而获得车辆在环岛内行驶的速度,减小能量管理里的可行域,提高计算效率,为车辆能量管理提供相应的约束;
[0058]
本发明提供的有信号灯参与的双车道环岛路口交通流预测方法,可以预测在某个时间段内,环岛内行驶车辆的平均速度的最大值和最小值,或车辆在环岛中行驶的最长和最短时间等,为城市交通拥堵主动防控以及车辆运行中的能量管理问题提供方法支持。
附图说明
[0059]
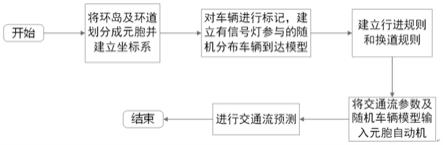
图1为本发明所述的有信号灯参与的双车道环岛路口交通流预测方法的流程图。
[0060]
图2为本发明所述的划分后六边形环岛元胞模型示意图。
[0061]
图3为本发明所述的六边形元胞自动机模型的斜坐标系示意图。
[0062]
图4为本发明所述的环岛信号放行第一相位相序示意图。
[0063]
图5为本发明所述的环岛信号放行第二相位相序示意图。
[0064]
图6为本发明所述的环岛信号放行第三相位相序示意图。
[0065]
图7为本发明所述的环岛信号放行第四相位相序示意图。
[0066]
图8为本发明所述的右转车辆进入换道的第一个元胞及其邻居元胞和最迟出环道元胞示意图。
[0067]
图9为本发明所述的直行车辆理想向内、向外换道元胞及最迟向外换道元胞示意图。
[0068]
图10为本发明所述的左转车辆理想向内、向外换道元胞及最迟向外换道元胞示意图。
[0069]
图11为本发明所述的换道规则流程图。
具体实施方式
[0070]
下面结合附图对本发明做进一步的详细说明,以令本领域技术人员参照说明书文字能够据以实施。
[0071]
本发明提供了一种有信号灯参与的双车道环岛路口交通流预测方法,具体包括如下步骤:
[0072]
步骤一、对双车道环岛路口进行分析并选择合适的元胞空间,将环岛路口划分为离散的元胞,并指明元胞大小、最大速度、元胞邻居和边界条件,然后建立相应的坐标系,并
给出各交通流参数的相应计算方法;
[0073]
其中,本实施例中的环岛路口为标准十字形,即圆形环岛与四个方向的车道相连,每个方向分为入口车道和出口车道,入口或出口车道又各自包含两条车道,每辆驶入环道路口的车辆,按照左转、直行、右转等行驶规则驶出环岛路口,不考虑u型转弯的情况,围绕着中心环岛,有内、外两条环道。在环岛路口的四个入口车道处,分别设有一个红绿灯。
[0074]
选用二维空间的元胞自动机对双车道环岛路口进行建模,对于二维元胞空间来说,其几何划分通常可按三角形、矩形或六边形三种网格排列,对于环道的形状,很显然三角形并不适合模拟环道的环形,矩形元胞也只能用扇形近似代替,而六边形元胞则可以自然组合成与环道相似的形状,很显然选用六边形元胞更有利于元胞模型的建立;如图2所示,对于环道的环状结构,6n个六边形元胞可围城一个环状,采用六边形元胞划分环道。
[0075]
将环道划分成一个一个规则的六边形元胞,每个元胞宽5.6m,大致为致密堵塞的车队中一辆车所占的空间距离,高约6.5m,每个时间步对应于实际的1s,环岛直径取z个元胞宽度(约5.6z m),为了方便与环道衔接,环岛用六边形元胞来组成一个近似的圆形。
[0076]
速度值表示车辆元胞的瞬时速度,取0~v
max
中的整数值,按照环岛的限速,取最大车速为v
m km/h,即v
max
=v
m
/5,这样每个速度单位为5km/h,车辆在一个时间步中增加一个速度单位恰好对应于现实中比较舒服的加速度1.4m/s2。
[0077]
一般在六边形元胞空间中,每个元胞拥有6个元胞邻居,由于在环道路口中不允许超车和倒车,且换道行为仅存在于刚进入环岛或即将驶出环岛的车辆,所以每个元胞有2个邻居,即紧邻的前方和后方元胞,其中,对于非出入口处的车辆,认为其邻居元胞为平行于中心环岛相应边长方向的两个元胞;对于出入口处的车辆,其邻居元胞为沿其换道方向的两个元胞。
[0078]
在环道中的每个元胞有且仅有两种状态,即被占据或为空。
[0079]
元胞的边界条件:在应用于交通的元胞自动机模型用,通常采用周期型边界条件,仿真模型在六边形元胞二维空间中有多个边界,由于环岛模型的限制,车辆仅可以从入口车道进入系统,从出口车道驶出系统,不可以从其他边界跳出系统,只能前进或者换道,且方向保持逆时针环岛行驶。
[0080]
坐标系的建立:
[0081]
如图3所示,在六边形元胞环境中,采用倾角为60
°
的斜坐标系,建立元胞位置矩阵,设u,v为斜坐标中的单位向量,则:
[0082][0083]
式中,w为六边形元胞的宽度,h为六边形元胞的高度,w=0.866h,为了方便实际应用,将斜坐标系转化为直角坐标系:
[0084]
设某点在斜坐标系中的坐标为(a,b),则(x,y)=a
×
u+b
×
v,转化为矩阵形式:
[0085][0086]
那么可得到坐标转换的函数公式:
[0087][0088]
六边形元胞间的距离:
[0089]
假设直角坐标系中两个元胞(x1,y1),(x2,y2),那么它们之间的距离为:
[0090][0091]
交通流参数:
[0092]
在宏观交通流的参数中,一般采用流量、平均速度和平均密度作为常用的评价指标。流量取交织区的某一断面进行计算,平均速度取所有非空元胞内车辆速度的平均值,平均密度取非空元胞数与全部元胞数比值
[0093]
在元胞空间中的交通流参数如下:
[0094]
1)流量:
[0095][0096]
式中,q
c
为流量,单位为辆/s,n为t时间内通过交织区某一断面的车辆数,x
t
为t时刻一个时间步内经过某一断面处的车辆数;
[0097]
2)平均速度:
[0098][0099]
式中,平均速度,n
max
为元胞系统直角坐标系中横纵坐标的最大值,ca
nun
为t时刻环道内不为空的元胞数;
[0100]
3)平均密度:
[0101][0102]
式中,为平均密度,单位为辆,ca
max
为环道元胞总数。
[0103]
将元胞空间中的交通流参数转换为实际交通流参数:
[0104]
1)流量:
[0105]
q=q
c
×
3600/t;
[0106]
式中,q的单位为辆/h。
[0107]
2)平均速度:
[0108][0109]
式中,的单位为km/h;
[0110]
3)平均密度:
[0111][0112]
式中,的单位为辆/km,w为元胞宽度。
[0113]
采用如下公式计算环岛路口的通行能力:
[0114][0115]
式中,q
m
为交织段上的最大通行能力,l为交织段长度,w为交织段宽度,e为环形交叉入口引道平均宽度,z为交织段内进行交织的车辆与全部车辆之比;
[0116]
所述环形交叉入口引道平均宽度满足:
[0117]
e=(e1+e2)/2(m);
[0118]
式中,e1为入口引道宽度,e2为环道突出部分宽度。
[0119]
若交叉口四周进出口处行人对车流产生不可忽略的影响,应对通过能力适当折减。
[0120]
在混合交通情况下,应将各类车辆换算成小汽车,对环岛交通的换算系数可采用小汽车为1,中型车为1.5,大型车为3.0,特大型(拖挂车)为3.5进行换算。
[0121]
根据经验,一般设计通行能力采用上述公式计算最大值的80%,故可将上式修改为:
[0122][0123]
步骤二、在所述元胞空间中将每辆车按照行驶目的进行标记,分析信号灯对进入环岛路口交通流的影响,并建立有信号灯参与的随机分布车辆到达模型;
[0124]
将进入环岛的车辆划分为左转、直行、右转车辆(不考虑u形转弯)。
[0125]
将环岛四个入口分别标记为a、b、c、d口,将每个入口的双向车道分别编号为:al(a
‑
left)、ar(a
‑
rignt);bl、br;cl、cr;dl、dr,再将每辆车按照其行驶目的,分为右转(r)、直行(s)、左转(l),那么从a入口右侧车道进入环岛右转的车辆就可表示为:arr。这样,就可以将每个进入环道的车辆的行驶行为进行标号和分类。
[0126]
信号灯对进入环道的车辆数及各个车辆的速度有重要影响。红灯期间,所对应的入口没有车辆进入环道,且入口车道的车辆可能会迅速聚集,排队等待放行。当红灯刚结束时,所有等待车辆的车速为0,并依次进入环道。绿灯期间随时有到达路口的车辆,若非红灯时排队的车辆,则其速度一般不从0开始演化,而是受其前方车辆车速的影响或者在自由流状态下有着演变为最大车速的趋势或处于最大车速。绿信比、红绿灯周期长度、放行的相位相序,也对进入环岛的车辆有着重要的影响。如果红灯时间较长,那么在红灯期间排队的车辆就会较多,相应的在绿灯放行期间进入环岛的车辆也较多;如果绿灯时间较长,那么则有形成类似于无信号灯状态的稳定交通流的趋势。
[0127]
在到达环岛入口的交通流中,车辆的到达数量及其在各相位的分布是随机的、重复的,那么可以使用马尔可夫过程建立有信号灯参与的随机分布车辆到达模型。
[0128]
四个入口的车流分为三个行驶方向,直行、左转和右转,假定右转的车辆一定在入口最右侧车道进入环岛并沿外侧环道驶出环岛,则右转车辆几乎不会对其他方向的车辆构
成影响,那么,所需考虑的交通流方向共有8个,并且由于信号灯的控制轮流放行每周期到达路口的交通流。
[0129]
以入口a为例:
[0130]
假设p
ij
表示一个信号周期中从i到j(i,j=r,s,l)的转移概率,则转移概率矩阵p为:
[0131][0132]
假设当前信号周期3个不同方向的交通流量占有率为w
r1
、w
s1
、w
l1
,那么下一周期的占有率则为:
[0133][0134]
假设转移概率矩阵固定,如果要预测第k个周期的概率,则:
[0135][0136]
则可以得到在当前周期以后一段时期的入口车道交通量占有率情况。
[0137]
稳定状态:
[0138]
根据马尔科夫链稳态平衡方程:
[0139][0140]
式中,[w
se
,w
le
,w
re
]
t
为平衡状态向量,w
se
+w
le
+w
re
=1,w
se
为平衡行驶状态直行的交通流占有率,w
le
为平衡行驶状态左转的交通流占有率,w
re
为平衡行驶状态右转的交通流占有率;
[0141]
平衡状态是暂时的,当红灯期间排队车辆全部进入环岛后,至下一次红灯之前,由于车辆不受信号灯的影响,认为车辆达到稳态。
[0142]
信号周期的设定方法如下:
[0143]
信号采用单口放行控制方法:对每一个进口分别单独设置一个相位,同一进口左转和直行车流均利用同一相位通行,一个进口放行完毕再进行下一个进口的放行。
[0144]
相位相序:如图4
‑
7所示,本实施例中采用顺时针放行,即前一相位车流通行过程中,后一相位车流进入环道待行。
[0145]
信号控制参数信号设定:
[0146]
最佳周期时长计算模型:
[0147][0148]
式中,c为最佳信号周期,单位为s;l为损失时间,单位为s;y为各相位关键流量比之和。
[0149]
有效绿灯时间模型:
[0150][0151]
式中,g
ei
为i相位有效绿灯时间,单位为s,y
i
为i相位关键流量比之和。
[0152]
马尔可夫链车辆排队模型:
[0153]
设有以下参数:绿灯时间t
g
,黄灯时间t
y
,红灯时间t
r
,启动损失和清尾损失时间t
lose
,入口车道数n,饱和车头时距h,入口道路容量c,即允许排队的最大车辆数,时段内第k个周期a路口绿灯时间到达的车辆数v
gak
,时段内第k个周期a路口黄灯和红灯时间到达的车辆数v
yrak
以及总周期数k。
[0154]
有效绿灯时间内通过a路口进入环岛的最大车辆数:
[0155][0156]
式中,(t
g
+t
y
‑
t
lose
)为有效绿灯时间,1/h为各车道的饱和流率,为对应车道饱和车头时距的倒数,入口车道的饱和流率为各车道饱和流率之和。
[0157]
绿灯时间内到达入口车道的车辆数为m的概率p
gam
和黄、红灯时间内到达入口车道的车辆数为m的概率p
yram
可以通过v
gak
和v
yrak
求得。
[0158]
信号路口的排队情况,不论过去情况如何,将来出现某一排队长度的概率取决于当前排队长度,因此具有马尔可夫性质。在红灯即将结束时,排队长度最长,所以只需建立该时刻的模型。
[0159]
首先确定排队状态转移矩阵p
ij
:
[0160]
假设当前红灯结束时的排队长度为i=i
k
,那么在一个周期后转移到排队长度为j=i
k+1
的概率为:
[0161]
设(i
k
+v
gak
‑
v
amax
)=v
xk
,v
xk
=max{i+v
gak
‑
v
amax
,0};
[0162]
则:
[0163][0164]
式中,v
xk
为当前周期中绿灯结束时的排队长度,加上红黄灯时间到达的车辆数v
yrak
,就表示了一个完整周期(从当前绿灯结束到红灯结束)的排队长度,即j。
[0165]
若计算时j<0,那么就代表绿灯结束时的排队长度为0,即j取0。
[0166]
由于上式中只有v
gak
和v
yrak
两个随机变量,而这两个随机变量又可由他们的概率
分布p
gam
和p
yram
得到,那么可将上式变换为:
[0167][0168]
式中,p
ij
为车辆排队状态转移矩阵,p
ic
为当排队长度达到最大时的车辆状态转移矩阵,v
amax
为有效绿灯时间内通过某一个路口进入环岛的最大车辆数,i为当前红灯结束时的排队长度,j为一个周期后转移到排队长度,c为允许排队车辆数的最大值,m为到达入口车道的车辆数,p
gam
为绿灯时间内到达入口车道的车辆数为m的概率,p
yraj
为红灯与黄灯时间内到达入口车道的车辆数为j的概率;p
yrac
红灯与黄灯时间内到达入口车道的车辆数为c的概率;
[0169]
不同时段的状态转移概率显然不同,但由于马尔可夫链的无记忆性,其稳态概率只取决于状态转移矩阵p
ij
,而与初始状态无关,只需将不同时段取相应的不同概率分开计算即可。
[0170]
步骤三、根据对双车道环岛路口交通流特征的分析,建立相应的换道规则,将行进规则、换道规则、交通流参数和所述随机分布车辆到达模型引入所述元胞自动机模型,对交通流进行预测。
[0171]
其中,所述步骤三具体包括:
[0172]
(1)元胞自动机模型(行进规则):
[0173]
常用于交通流模型的ns模型存在一定的局限性,其仅能模拟单车道交通流。而stca模型则可用于双车道交通流。
[0174]
假定环道不允许超车,车辆跟驰行驶,采用如下stca元胞自动机模型:
[0175]
a.加速:v
(i,j)
(t)=min{v
(i,j)
(t
‑
1)+1,v
max
};
[0176]
b.减速:v
(i,j)
(t)=min{v
(i,j)
(t)+1,d
(i,j)
‑
1};
[0177]
c.随机慢化:若ξ(t)<p,则v
(i,j)
(t)=max{v
(i,j)
(t)
‑
1,0};
[0178]
d.运动:x
(i,j)
(t)=x
(i,j)
(t
‑
1),v
(i,j)
(t)};
[0179]
式中,v
(i,j)
(t)为元胞(i,j)在时刻t的速度,d
(i,j)
为元胞(i,j)与前车的车头间距,p为随机慢化概率,x
(i,j)
(t)为元胞(i,j)在时刻t的位置,在每个时刻t有随机数ξ(t)∈[0,1],由均匀分布中提取,然后将这个数字与随机慢化概率p进行比较。
[0180]
stca模型的基本换道规则:
[0181][0182]
式中,d
n
为第n辆车与前方车辆的间距,d
n,other
为第n辆车与相邻车道前方车辆的间距,d
n,back
为第n辆车与相邻车道后方车辆的间距,d
safe
为安全换道间距,d
safe
=v
max
,c
n
为第n辆车所在车道,且c
n
=1或c
n
=0,d
n
<min{v
n+1
,v
max
}表示第n辆车在原车道受到阻挡,d
n,other
>d
n
表示受阻车辆在另一车道上能够达到更快的速度,d
n,back
>d
saf
表示若所述受阻车辆换道且符合安全换道间距,则在另一条车道上后方的车辆与所述受阻车辆存在安全距离。
[0183]
针对双车道环岛路口的具体换道规则:
[0184]
(1)双车道环岛换道行为分析:
[0185]
如图11所示,对于双车道环岛车流,内侧车道供直行或左转的车流通行,而外侧车道则供右转车流以及刚进入或即将驶出环岛路口的左转或直行车流通行。车辆驶入、驶出环岛路口以及向内、向外换道时,要收到相邻位置车流的影响。当车辆驶入环岛路口时,相邻外环道上的车流具有优先权,车辆需等待外环道上的空元胞进入环岛路口;当车辆驶出环岛路口时(已向外换道完毕),主要受其前方同样驶出环岛路口车流的影响,若车流发生拥堵,则即将驶出环岛路口的车辆将做相应等待,跟驰驶出环岛,在外环道内等待驶出环岛的车辆,将对外环道上行驶的车流产生影响,主要是右转车流;当车辆向内换道时,其相邻元胞必须为空,否则不能向内换道,而直行和左转车辆不能全程从外侧环道通行,所以必定有一个最迟向内换道的元胞,当未到达这个元胞时,车辆可沿着外环道继续行驶,等待时机向内换道,当到达这个元胞时,车辆需原地等待,当最迟向内换道元胞的邻居元胞为空时,方可向内换道,那么在产生等待时,也会对外环道上行驶的车流造成影响;当车辆向外换道时,车辆准备驶离环岛路口,其必定倾向于沿着出切线段驶出环岛路口,所以存在一个理想的向外换道元胞,当到达或超过这个元胞时,若其邻居元胞为空则立即向外换道,又由于车辆必须驶出环岛路口,其最晚不能超过要驶出的出口附近的元胞,所以必定存在着一个最迟向外换道元胞,当车辆到达最迟向外换道元胞时,若该元胞的邻居元胞不为空,则车辆需原地等待,直到最迟向外换道元胞的邻居元胞为空时,方可驶出环岛路口,那么,若产生等待,则其也会对内侧正常行驶的车辆造成影响。当前方的相邻元胞为空时,车辆的速度将按期望的速度更新规则进行更新,而当产生等待时,车辆将制动产生排队。
[0186]
a.自由流状态:
[0187]
在每条道路的入口边界处,驶入车辆和前车之间的空间距离n服从泊松分布:
[0188][0189]
分布参数λ是交通流量的一个量度,当λ比较大时车流量比较小,而λ取值较大时车流量也随之增大。
[0190]
假定每个入口进入环道的右转车辆,都沿外环道进入环岛路口,且沿着环道外道驶出环岛并进入相邻入口的左侧或右侧车道,不产生换道行为。自由流状态下,所有车辆都从右侧车道驶出环岛。
[0191]
假定每个入口进入环道的直行或左转车辆,都沿着内侧环道行驶,一段时间后,从出口车道的左侧或右侧车道驶出环岛。自由流状态下,驾驶员将立即朝着其行驶方向的相邻内侧元胞换道(理想向内换道元胞处),沿着内环道行驶一段时间后,再沿着出口车道右车道的出切线段(出口右侧车道中心线与外环道元胞交点与最后一个遇到的内环岛顶点的六边形元胞中心的连线)向外换道驶出环道(理想向外换道元胞处),即自由流状态下,驾驶员期望以最短路线进行行驶,所以无论车辆是从入口车道左侧还是右侧驶入环岛,自由流状态下驾驶员都从出口右侧车道驶出环岛。
[0192]
b.拥挤车流:出环和绕环优先,入环让行:
[0193]
刚进入环岛时,当前方元胞为空时,车辆按原更新规则进入环岛;当前方元胞不为空时,将存在延误现象,进而形成车队。为了估算延迟时间,测量t时刻长度(即静止车辆的数目)并将其记作r,这样t+1时刻的延迟时间就可以用下式来计算,即:
[0194]
delay(t+1)=delay(t)+r。
[0195]
在每条道路的入口边界处,驶入车辆和前车之间的空间距离n服从泊松分布,分布参数λ是交通流量的一个量度,当λ比较大时车流量比较小,而λ取值较大时车流量也随之增大。
[0196]
进入环岛后:
[0197]
假定每个入口进入环道的右转车辆,都沿外环道进入环岛路口,且沿着环道外道驶出环岛并进入相邻入口的左侧或右侧车道,不产生换道行为。出环岛路口时,优先选择右侧车道驶出环岛路口,若因车流影响无法从右侧车道驶出,则最迟不超过出口处左侧车道相邻元胞驶出环岛。如图8所示,以a入口进入右转车辆,进入环道的第一个元胞及其邻居元胞以及理想和最迟出环道元胞。
[0198]
假定每个入口进入环道的直行或左转车辆,都沿着内侧环道行驶,在拥挤车流条件下,驾驶员仍期望按照自由流状态进入环岛,即:当未到达自由流状态的换道元胞时,不进行换道;当到达或者越过自由流状态的换道元胞时,只要相邻内侧(外侧)元胞为空,则立即进行换道。值得注意的是,驶出环岛时,车辆的最晚向外换道点不能超过出口左侧车道处的邻居元胞(即最迟向外换道元胞),如行驶到该元胞车辆还未向外换道,则原地等待外侧车道的邻居元胞空出时再进行换道。另外,若车辆始终没有机会向内侧换道,则直接沿外环道行驶并由出口右侧车道驶出环岛。如图9所示,为以a入口进入直行的车辆理想向内、向外换道元胞及最迟向外换道元胞示意图;如图10所示,为以a入口进入左转车辆,理想向内、向外换道元胞及最迟向外换道元胞示意图。
[0199]
其中,按stca模型更新为按照元胞自动机模型的行进规则进行加速、减速、随机慢化、运动的更新。
[0200]
在实际应用中,利用本模型可以预测在某个时间段内,环岛内行驶车辆的平均速度的最大值和最小值,或车辆在环岛中行驶的最长和最短时间等,为车辆能量管理提供相应的约束。
[0201]
自由流情况下,在某一时间段内由元胞模型输出每一时刻各元胞内车辆的速度,并对该时刻元胞内车辆的速度取平均值,即可得到该时刻环道内车辆的平均速度。然后对所选时间段内获得的各时刻的车辆车速平均值作比较,即可获得该时段内环岛内车辆的平均速度的最大值和最小值。
[0202]
在非自由流状态下,由于环岛路段中,有可能存在局部拥堵、局部畅通的情况,那么此时环道元胞内车辆的速度有可能差异很大,对所有车辆计算平均速度的意义不大。此时可以对不同行驶路线的车辆在环岛内行驶的时间进行观测。按照本发明所述的方法,首先对不同入口进入环岛、不同行驶目的的车辆进行标记,然后记录每辆驶入环岛路口和驶出环岛路口车辆的时间,之后对相同标记车辆的时间(指某车辆驶入环岛路口和驶出环岛路口时分别记录的时间)作差,即可得出某车辆在环岛路口内行驶的时间。对出入口相同的车辆的行驶时间做对比,选出最大和最小值,即可对非自由流状态下某个行驶路线车辆通过环岛路口的最长时间和最短时间。利用环道周长等参数,也可以对某行驶路线车辆的最
大、最小平均速度进行预测。
[0203]
车辆的能量管理,主要是做全局优化,全局优化的时候就需要遍历可行域,如果可行域非常大,计算效率就会很低,本发明提供的有信号灯参与的双车道环岛路口交通流预测方法,根据环岛中车流量的状况采用不同的换道规则,从而获得车辆在环岛内行驶的速度,减小能量管理里的可行域,提高计算效率,为车辆能量管理提供相应的约束。
[0204]
尽管本发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本发明的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里示出与描述的图例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1