一种机器人平台围栏系统的制作方法
[0001]
本实用新型涉及机器人技术领域,特别涉及一种机器人平台围栏系统。
背景技术:
[0002]
机器人平台的围栏系统的作用是防止人们误进去到机器人平台中,通常当有人进去到机器人平台中的时候,机器人平台的围栏系统就会发出报警信号,机器人平台根据所述报警信号暂停所述机器人平台运作,以对闯入的人和机器均起到保护作用。但是,现有的机器人平台围栏系统容易出现误触发情况,给机器人平台的正常运行完成很大的麻烦。
技术实现要素:
[0003]
本实用新型的目的是提供一种机器人平台围栏系统,以解决现有技术中所存在的一个或多个技术问题,至少提供一种有益的选择或创造条件。
[0004]
本实用新型解决其技术问题的解决方案是:一种机器人平台围栏系统,包括电子围栏、判断装置和压力感应面,所述电子围栏围绕机器人平台,所述压力感应面设置在电子围栏所在位置的地面上,所述电子围栏设有第一输出节点作为其的输出端,所述压力感应面设有第二输出节点作为其的输出端,所述判断装置的第一输入端与第一输出节点连接,所述判断装置的第二输入端与第二输出节点连接,所述判断装置被配置为:当电子围栏和压力感应面均触发时,则输出报警信号。
[0005]
进一步,所述判断装置包括单片机,所述单片机的第一gpio口与第一输出节点连接,所述单片机的第二gpio口与第二输出节点连接,所述电子围栏被配置为:当其触发时,则输出高电平;所述压力感应面被配置为:当其触发时,则输出高电平;所述单片机被配置为:当第一gpio口和第二gpio口均接收到高电平时,则对外输出电平信号。
[0006]
进一步,所述电子围栏包括第一立柱,第二立柱,第三立柱和第四立柱,所述第一立柱设有第一红外线发射器和第一红外线接收器,所述第二立柱设有第二红外线发射器和第二红外线接收器,所述第三立柱设有第三红外线发射器和第三红外线接收器,所述第四立柱设有第四红外线发射器和第四红外线接收器,所述第一红外线发射器用于发出第一探测红外线,所述第二红外线发射器用于发出第二探测红外线,所述第三红外线发射器用于发出第三探测红外线,所述第四红外线发射器用于发出第四探测红外线,所述第一红外线接收器用于接收第四探测红外线,所述第二红外线接收器用于接收第一探测红外线,所述第三红外线接收器用于接收第二探测红外线,所述第四红外线接收器用于接收第三探测红外线,所述第一探测红外线、第二探测红外线、第三探测红外线和第四探测红外线形成电子围栏围绕机器人平台,所述第一立柱、第二立柱、第三立柱和第四立柱作为所述电子围栏的支点,所述第一红外线接收器的输出端、第二红外线接收器的输出端、第三红外线接收器的输出端和第四红外线接收器的输出端均并接在第一输出节点。
[0007]
进一步,所述压力感应面包括若干个片状压力传感器和覆盖地板,所述若干个片状压力传感器形成阵列并平铺在电子围栏所在位置的地面上,所述覆盖地板覆盖到所述若
干个片状压力传感器的感应面上,所述若干个片状压力传感器的输出端并接到第二输出节点上,所述第二输出节点与单片机的第二gpio口连接,所述若干个片状压力传感器均被配置为当其感应到的压力超出预先设定的压力阈值时,则输出高电平。
[0008]
进一步,所述单片机的型号为89c51。
[0009]
本实用新型的有益效果是:一种机器人平台围栏系统,包括电子围栏、判断装置和压力感应面,所述电子围栏围绕机器人平台,所述压力感应面设置在电子围栏所在位置的地面上,所述电子围栏设有第一输出节点作为其的输出端,所述压力感应面设有第二输出节点作为其的输出端,所述判断装置的第一输入端与第一输出节点连接,所述判断装置的第二输入端与第二输出节点连接,所述判断装置被配置为:当电子围栏和压力感应面均触发时,则输出报警信号。通过电子围栏和压力感应面同时从两个维度对闯入者进行判断,提高了机器人平台围栏系统的判断准确度,避免了误触发情况的发生。
附图说明
[0010]
为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单说明。显然,所描述的附图只是本实用新型的一部分实施例,而不是全部实施例,本领域的技术人员在不付出创造性劳动的前提下,还可以根据这些附图获得其他设计方案和附图。
[0011]
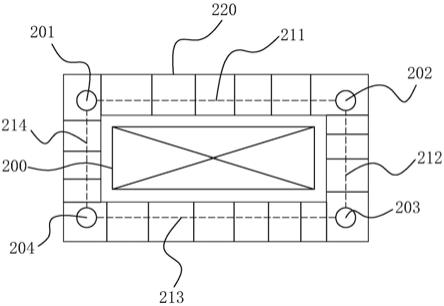
图1是机器人平台围栏系统的俯视结构示意图;
[0012]
图2是机器人平台围栏系统的系统框图。
具体实施方式
[0013]
以下将结合实施例和附图对本实用新型的构思、具体结构及产生的技术效果进行清楚、完整地描述,以充分地理解本实用新型的目的、特征和效果。显然,所描述的实施例只是本实用新型的一部分实施例,而不是全部实施例,基于本实用新型的实施例,本领域的技术人员在不付出创造性劳动的前提下所获得的其他实施例,均属于本实用新型保护的范围。另外,文中所提到的所有联接/连接关系,并非单指构件直接相接,而是指可根据具体实施情况,通过添加或减少联接辅件,来组成更优的联接结构。本发明创造中的各个技术特征,在不互相矛盾冲突的前提下可以交互组合。
[0014]
实施例1,参考图1和图2,一种机器人平台围栏系统,包括电子围栏、判断装置和压力感应面,所述电子围栏围绕机器人平台200,所述压力感应面设置在电子围栏所在位置的地面上,所述电子围栏设有第一输出节点110作为其的输出端,所述压力感应面设有第二输出节点120作为其的输出端,所述判断装置的第一输入端与第一输出节点110连接,所述判断装置的第二输入端与第二输出节点120连接,所述判断装置被配置为:当电子围栏和压力感应面均触发时,则输出报警信号。
[0015]
其中,电子围栏指的是通过光电信号对某一个位置进行围闭,一般是以利用红外线为主,当该红外线被阻挡的时候,则会触发,产生触发信号。压力感应面指的是设置在电子围栏所在位置的地面上,可以检测到一定压力的感应装置。当压力感应面检测到预先设定的压力时,则会触发,产生触发信号。本实用新型主要是通过同时判断电子围栏和压力感应面,只有当电子围栏和压力感应面同时被触发时,判断装置才会输出报警信号。通过这
样,就可以从两个维度来判断是否有人误入到机器人平台200围栏系统。首先可以从地面的压力,当有闯入者要进入机器人平台200围栏系统的时候,就会踩到压力感应面。如果这个闯入者继续要进入机器人平台200围栏系统则会触发电子围栏,这样,就会同时满足了触发压力感应面和电子围栏,从而判定该闯入者是要进入机器人平台200围栏系统。这样的设置,相对于单纯只有电子围栏会更加准确,避免了误触发的情况出现。
[0016]
本实用新型通过电子围栏和压力感应面同时从两个维度对闯入者进行判断,提高了机器人平台200围栏系统的判断准确度,避免了误触发情况的发生。
[0017]
其中,对于判断装置可以通过现有模块进行搭建。比如说通过plc模块或者微处理器模块进行搭建。在一些实施例中,所述判断装置包括单片机100,当然所述单片机100会有一定的外围电路使其可以正常工作。在一些优选的实施例中,所述单片机100的型号为89c51。
[0018]
所述电子围栏包括第一立柱201,第二立柱202,第三立柱203和第四立柱204,所述第一立柱201设有第一红外线发射器和第一红外线接收器,所述第二立柱202设有第二红外线发射器和第二红外线接收器,所述第三立柱203设有第三红外线发射器和第三红外线接收器,所述第四立柱204设有第四红外线发射器和第四红外线接收器,所述第一红外线发射器用于发出第一探测红外线211,所述第二红外线发射器用于发出第二探测红外线212,所述第三红外线发射器用于发出第三探测红外线213,所述第四红外线发射器用于发出第四探测红外线214,所述第一红外线接收器用于接收第四探测红外线214,所述第二红外线接收器用于接收第一探测红外线211,所述第三红外线接收器用于接收第二探测红外线212,所述第四红外线接收器用于接收第三探测红外线213,所述第一探测红外线211、第二探测红外线212、第三探测红外线213和第四探测红外线214形成电子围栏围绕机器人平台200,所述第一立柱201、第二立柱202、第三立柱203和第四立柱204作为所述电子围栏的支点,所述第一红外线接收器的输出端、第二红外线接收器的输出端、第三红外线接收器的输出端和第四红外线接收器的输出端均并接在第一输出节点110。
[0019]
所述压力感应面包括若干个片状压力传感器和覆盖地板,所述若干个片状压力传感器形成阵列并平铺在电子围栏所在位置的地面上,所述覆盖地板覆盖到所述若干个片状压力传感器的感应面上,所述若干个片状压力传感器的输出端并接到第二输出节点120上,所述第二输出节点120与单片机100的第二gpio口p1.1连接,所述若干个片状压力传感器均被配置为当其感应到的压力超出预先设定的压力阈值时,则对外输出高电平。
[0020]
所述单片机100的第一gpio口p1.0与第一输出节点110连接,所述单片机100的第二gpio口p1.1与第二输出节点120连接,所述电子围栏被配置为:当其触发时,则输出高电平;所述压力感应面被配置为:当其触发时,则输出高电平;所述单片机100被配置为:当第一gpio口p1.0和第二gpio口p1.1均接收到高电平时,则对外输出电平信号。所述电平信号作为报警信号被外部的装置识别,其中,所述电平信号可以是静态的电压信号,即高电平或者低电平,也可以是动态的电压信号,即是脉冲信号。
[0021]
所述覆盖地板为形成“回”字形来铺设,在覆盖地板的下方设置干片状压力传感器。覆盖地板具体可以通过多块子覆盖地板220拼接铺设而成。而且,最佳的方式是在每一块的子覆盖地板220的下方均设置至少一个压力传感器。
[0022]
以上对本实用新型的较佳实施方式进行了具体说明,但本发明创造并不限于所述
实施例,熟悉本领域的技术人员在不违背本实用新型精神的前提下还可做出种种的等同变型或替换,这些等同的变型或替换均包含在本申请权利要求所限定的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1