退避控制装置、车辆及退避控制方法与流程
1.本发明涉及对车辆的退避行驶进行控制的退避控制装置、车辆及退避控制方法。
背景技术:
2.以往,开发了安全地使难以继续进行自动驾驶的车辆退避的功能。该功能例如被称为最小风险策略(mrm,minimal risk maneuver)。
3.例如,在专利文献1中公开了如下装置:在使本车辆向路肩退避时,以使本车辆被位于其周边的其他车辆超越的方式控制本车辆的速度,并在本车辆被其他车辆超越后使本车辆向路肩移动的装置。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开2018-144720号公报。
技术实现要素:
7.解决问题的方案
8.本发明的一个形态的退避控制装置具备:输入部,接收作为存在于车道的车辆的退避目的地而被决定的退避区域的信息、和在所述退避区域中被识别出的对象的信息;以及控制部,基于所述退避区域的信息,以将所述退避区域分割为至少包括距所述车辆最近的第1部分区域和与所述第1部分区域相邻的第2部分区域的多个部分区域的方式对所述退避区域进行识别,并基于所述对象的信息,以使所述车辆向所述多个部分区域中的、所述车辆能够退避于其中的第1范围退避的方式,对所述车辆进行控制。
9.本发明的一个形态的车辆,具备本发明的一个形态的退避控制装置。
10.本发明的一个形态的退避控制方法包括以下工序:接收作为存在于车道的车辆的退避目的地而被决定的退避区域的信息、和在所述退避区域中被识别出的对象的信息的工序;基于所述退避区域的信息,以将所述退避区域分割为至少包括距所述车辆最近的第1部分区域和与所述第1部分区域相邻的第2部分区域的多个部分区域的方式对所述退避区域进行识别的工序;以及基于所述对象的信息,以使所述车辆向所述多个部分区域中的、所述车辆能够退避于其中的范围退避的方式,对所述车辆进行控制的工序。
11.发明效果
12.根据本发明,能够进一步抑制成本。
附图说明
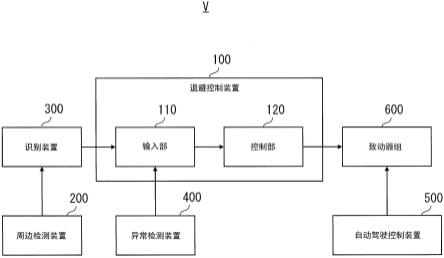
13.图1是表示本发明的实施方式的车辆及退避控制装置的结构的一例的框图。
14.图2是示意性地表示本发明的实施方式的退避区域的一例的俯视图。
15.图3是示意性地表示本发明的实施方式的多个部分区域的一例的俯视图。
16.图4是示意性地表示本发明的实施方式的多个部分区域的其他例子的俯视图。
17.图5是示意性地表示本发明的实施方式的多个部分区域的其他例子的俯视图。
18.图6是示意性地表示在第1部分区域存在对象的情况的俯视图。
19.图7是示意性地表示在第2部分区域存在对象的情况的俯视图。
20.图8是示意性的表示在第3部分区域存在对象的情况的俯视图。
21.图9是表示本发明的实施方式的退避控制装置的动作的流程的一例的流程图。
22.图10是表示利用程序实现各部的功能的计算机的硬件结构的图。
具体实施方式
23.下面,参照附图对本发明的实施方式进行说明。此外,在各图中,对共同的构成要素赋予相同的附图标记,并适当地省略其说明。
24.首先,使用图1对本实施方式的车辆v及退避控制装置100的结构说明。图1是表示本实施方式的车辆v及退避控制装置100的结构的一例的框图。
25.车辆v是进行自动驾驶的汽车(可以是客车,也可以是商用车辆)。
26.如图1所示,车辆v具备:退避控制装置100、周边检测装置200、识别装置300、异常检测装置400、自动驾驶控制装置500及致动器组600。
27.周边检测装置200是检测车辆v的周边环境(例如,车辆v的前后左右方向的环境)的设备。作为周边检测装置200,例如可以使用感测相机、激光传感器和/或毫米波雷达等。周边检测装置200将作为检测结果的周边环境信息向识别装置300输出。此外,基于周边检测装置200的检测技术是公知技术,因此,省略其详细说明。
28.识别装置300是基于从周边检测装置200接收的周边环境信息,识别(也可以说“决定”)退避区域,并且识别存在于该退避区域的对象(例如,行人、自行车等)的设备。此外,对于识别装置300来说,车辆v的当前位置是已知的。
29.退避区域是使难以继续进行自动驾驶的车辆v退避的区域。作为退避区域,例如,可列举包括路肩、面对路肩的车道的一部分、人行道、自行车道、行人自行车道、区划出的停车场等中的至少一个的区域。但是,退避区域不限定于上述区域,只要是车辆v能够进入且完全不妨碍其他车辆等的通行的区域即可。
30.对应于检测结果的信息而在由识别装置300进行的识别处理中使用例如模式匹配或聚类等。此外,基于识别装置300的识别技术是公知技术,因此,省略其详细的说明。
31.识别装置300将作为识别结果的退避区域信息及对象信息向退避控制装置100输出。
32.退避区域信息例如包括退避区域相对于车辆v的相对位置、退避区域的形状、退避区域的大小(面积)等信息。
33.对象信息例如包括对象相对于车辆v的相对位置、对象相对于车辆v的相对速度等信息。
34.在此,使用图2对由识别装置300识别的退避区域及对象的一例进行说明。图2是示意性地表示退避区域c及行人p(对象的一例)的俯视图。
35.图2中,车道a是具有左侧车辆通行带及右侧车辆通行带的道路。车辆v在左侧车辆通行带向箭头a表示的方向行驶。
36.图2中,行人自行车道b是与车道a相邻的道路。
37.退避区域c包括车道a的一部分及行人自行车道b的一部分。在图2的例子中,在退避区域c内存在行人p。行人p例如正在向与车辆v相同的方向行进。此外,退避区域c的形状及大小不限定于图2所示的形状及大小。
38.搭载于车辆v的识别装置300识别退避区域c,并将与该退避区域c有关的退避区域信息向退避控制装置100输出。
39.另外,搭载于车辆v的识别装置300识别存在于退避区域c的行人p,将与该行人p有关的对象信息向退避控制装置100输出。
40.以上,对由识别装置300识别的退避区域及对象的一例进行了说明。下面,返回到图1的说明。
41.异常检测装置400是检测车辆v中的异常的设备。作为异常,例如可列举:获取执行自动驾驶所需的信息的设备(例如,上述的周边检测装置200)发生故障的状态、执行车辆v的加减速、转向或制动的设备发生故障的状态、车辆v的乘员意识不清的状态、车辆v的乘员已经死亡的状态等。异常检测装置400将作为检测结果的异常信息向退避控制装置100输出。此外,基于异常检测装置400的检测技术是公知技术,因此省略其详细的说明。
42.自动驾驶控制装置500是对后述的致动器组600进行控制来使车辆v执行自动驾驶的设备。此外,自动驾驶控制装置500可以对车辆v的加减速、制动及转向的全部进行控制,也可以对这些的一部分进行控制。
43.但是,自动驾驶控制装置500不对车辆v退避时的加减速、制动及转向进行控制。车辆v退避时的加减速、制动及转向由后述的退避控制装置100控制。即,在本实施方式中,自动驾驶控制装置500使车辆v执行退避以外的自动驾驶,退避控制装置100使车辆v执行退避。
44.此外,在本实施方式中,以车辆v具备自动驾驶控制装置500的情况为例进行说明,但是,也可以代替自动驾驶控制装置500,而具备对驾驶员的驾驶操作(例如,加减速操作及转向操作中的至少一者)进行辅助的驾驶辅助装置。
45.另外,异常检测装置400也可以是检测驾驶员瞌睡、或因突发性的发病导致不能正常驾驶的情况的驾驶员监控装置。在通过驾驶员的手动操作驾驶车辆v的情况下,驾驶员监控装置在检测到驾驶员瞌睡、突发性的发病等之类的驾驶员的异常时,将作为检测结果的异常信息向退避控制装置100输出。
46.致动器组600是执行车辆v的加速、减速、制动、转向等的致动器组。致动器组600例如包括执行加速及减速的马达致动器、执行制动的制动致动器、执行转向的转向致动器等各种致动器。
47.如上所述,退避控制装置100是使车辆v执行退避的设备。退避控制装置100与自动驾驶控制装置500不是一体的。
48.如图1所示,退避控制装置100具有输入部110及控制部120。
49.输入部110从异常检测装置400接收异常信息。另外,输入部110从识别装置300接收退避区域信息及对象信息。而且,输入部110将这些信息向控制部120输出。
50.控制部120以从输入部110接收到异常信息为触发,基于从输入部110接收的退避区域信息及对象信息进行以下的处理。
51.在此,使用图2及图3~图8,对控制部120进行的处理的具体例子进行说明。在此,
以图2所示的存在于车道a的车辆v向图2所示的退避区域c退避的情况为例进行说明。
52.首先,控制部120以将退避区域信息所示的退避区域c(参照图2)如图3所示那样分割为多个部分区域c1~c3的方式,对退避区域c进行识别。
53.部分区域c1是距车辆v最近的区域,包括车道a的一部分及行人自行车道b的一部分。部分区域c2是与第1部分区域c1相邻的区域,包括车道a的一部分及行人自行车道b的一部分。部分区域c3是与第2部分区域c2相邻的区域,包括行人自行车道b的一部分。
54.此外,部分区域的形状、大小、数量不限定于图2所示的的形状、大小、数量。例如,也可以如图4所示那样,退避区域c被分割为长方形形状的部分区域c4~c6。
55.另外,省略图示,但是,例如,当车辆v正在车道a的右侧车辆通行带行驶的情况下,由识别装置300识别的退避区域也可以是跨越车道a的车辆通行带的边界线(例如,白色虚线)的大小。在该情况下,如图5所示,退避区域也可以被分割为长方形形状的部分区域c7~c10。部分区域c7是包括右侧车辆通行带的一部分及左侧车辆通行带的一部分的区域。部分区域c8是包括左侧车辆通行带的一部分的区域。
56.另外,对于退避区域c的分割数(换言之,部分区域的数量),可以预先设定,也可以由控制部120根据退避区域c的宽度(图3~图5中的左右方向的长度)来决定。
57.另外,对于部分区域的形状、大小,可以预先设定,也可以由控制部120根据退避区域c的形状、大小来决定。但是,优选地,以使得在车辆v的侧方及后方包含对象可存在的区域的方式,决定部分区域的形状、大小。
58.接着,控制部120基于对象信息,判定出部分区域c1~c3中的、车辆v能够退避于其中的范围(以下,称为“可退避范围”)。例如,按照部分区域c1、c2、c3的顺序(升序)进行该判定。
59.首先,控制部120对在部分区域c1中是否存在对象进行判定。
60.在此,例如,在如图6所示,在部分区域c1中存在行人p的情况下,控制部120判定为没有可退避范围。在该情况下,控制部120以使车辆v继续行驶(例如,直行)的方式对致动器组600进行控制。之后,若输入部110从识别装置300接收了新的退避区域信息及新的对象信息,则控制部120基于这些信息,再次进行退避区域的分割并继续进行各部分区域中有无对象的判定,或停车。
61.另一方面,在部分区域c1中不存在对象的情况下,控制部120对在部分区域c2中是否存在对象进行判定。
62.在此,例如,在如图7所示,在部分区域c2中存在行人p的情况下,控制部120判定为可退避范围是部分区域c1。而且,控制部120以使车辆v进入部分区域c1并在部分区域c1内停车的方式对致动器组600进行控制。通过该控制,车辆v从车道a向部分区域c1进入,在沿着部分区域c1的长度方向直行后,在部分区域c1内直行。由此,车辆v向部分区域c1的退避完成。之后,若输入部110从识别装置300接收了新的退避区域信息及新的对象信息,则控制部120基于这些信息,再次进行退避区域的分割并继续进行各部分区域中有无对象的判定,或者对致动器组600进行控制而使车辆v停车。
63.另一方面,当在部分区域c2中不存在对象的情况下,控制部120对在部分区域c3中是否存在对象进行判定。
64.在此,例如,在如图8所示,在部分区域c3中存在行人p的情况下,控制部120判定为
可退避范围是部分区域c1、c2。而且,控制部120以使车辆v经由部分区域c1向部分区域c2进入,并在部分区域c2内停车的方式,对致动器组600进行控制。通过该控制,车辆v从车道a经由部分区域c1向部分区域c2进入,在沿着部分区域c2的长度方向直行后,在部分区域c2内直行。由此,车辆v向部分区域c2的退避完成。之后,若输入部110从识别装置300接收了新的退避区域信息及新的对象信息,则控制部120基于这些信息,再次进行退避区域的分割并继续进行各部分区域中有无对象的判定,或者对致动器组600进行控制而使车辆v停车。
65.另一方面,当在部分区域c3中不存在对象的情况下,控制部120判定为可退避范围是部分区域c1、c2、c3。而且,控制部120以使车辆v经由部分区域c1、c2进入部分区域c3,并在部分区域c3内停车的方式,对致动器组600进行控制。通过该控制,车辆v从车道a经由部分区域c1、c2向部分区域c3进入,在沿着部分区域c3的长度方向直行后,在部分区域c3内直行。由此,车辆v向部分区域c3的退避完成。之后,若输入部110从识别装置300接收了新的退避区域信息及新的对象信息,则控制部120基于这些信息,再次进行退避区域的分割并继续进行各部分区域中有无对象的判定,或者对致动器组600进行控制而使车辆v停车。
66.以上,对控制部120进行的处理的具体例子进行了说明。
67.例如由ecu(electronic control unit,电子控制单元)实现上述的退避控制装置100、识别装置300、异常检测装置400及自动驾驶控制装置500。但是,如上所述,退避控制装置100与自动驾驶控制装置500不是一体的,因此,实现退避控制装置100的ecu与实现自动驾驶控制装置500的ecu是分开设置的。此外,例如,也可以由同一ecu实现识别装置300和退避控制装置100。
68.以上,对车辆v及退避控制装置100的结构进行了说明。
69.接着,使用图9,对退避控制装置100的动作的流程进行说明。图9是表示退避控制装置100的动作的流程的流程图。
70.如上所述,在退避控制装置100从异常检测装置400接收了异常信息的情况下(换言之,在车辆v中产生了对继续进行自动驾驶带来障碍的某些异常的情况下),开始图9所示的流程。
71.首先,输入部110从识别装置300接收退避区域信息及对象信息(步骤s1)。然后,输入部110将退避区域信息及对象信息向控制部120输出。
72.接着,控制部120将退避区域信息所示的退避区域分割为n个部分(n为2以上的整数),并识别第1~第n部分区域(步骤s2)。
73.在此,第1部分区域是距车辆v最近的部分区域(例如,图3所示的部分区域c1)。另外,第n部分区域是距车辆v最远的部分区域(例如,图3所示的部分区域c3)。
74.接着,控制部120将表示作为后述的步骤s4的判定对象的部分区域的值n设定为1(步骤s3)。
75.接着,控制部120基于对象信息,对在第n部分区域中是否存在对象进行判定(步骤s4)。
76.当在第n部分区域不存在对象的情况下(步骤s4:“否”),控制部120使n增加1(步骤s5),并判定是否满足n》n(步骤s6)。
77.在满足n》n的情况下(步骤s6:“是”),流程进入后述的步骤s10。
78.在不满足n》n的情况下(步骤s6:“否”),流程返回到步骤s4。
79.当在第n部分区域中存在对象的情况下(步骤s4:“是”),控制部120对n是否为1进行判定(步骤s7)。
80.在n为1的情况下(步骤s7:“是”),控制部120判定为没有可退避范围(步骤s8)。
81.而且,控制部120以使车辆v继续行驶的方式对致动器组600进行控制(步骤s9)。之后,也可以再次从步骤s1开始重复进行流程。在该情况下,如上所述,输入部110从识别装置300接收新的退避区域信息及新的对象信息(步骤s1),控制部120基于新的退避区域信息及新的对象信息,进行从步骤s2起的处理。
82.在n不是1的情况下(步骤s7:“否”),控制部120判定为可退避范围是第n-1部分区域(步骤s10)。
83.而且,控制部120以使车辆v向第n-1部分区域退避的方式对致动器组600进行控制(步骤s11)。之后,也可以再次从步骤s1开始重复进行流程。
84.以上,对退避控制装置100的动作的流程进行了说明。
85.如在此详细说明的那样,本实施方式的退避控制装置100的特征在于,具备:输入部110,接收作为存在于车道a的车辆v的退避目的地而被决定的退避区域c的信息、和在退避区域c中被识别出的对象(例如,行人p)的信息;以及控制部120,基于退避区域c的信息,以将退避区域c分割为至少包括距车辆最近的第1部分区域c1和与第1部分区域c1相邻的第2部分区域c2的多个部分区域(例如,第1部分区域c1~第3部分区域c3)的方式,对退避区域c进行识别,并基于对象信息,判定出多个部分区域中的、车辆v能够退避于其中的第1范围(例如,第1部分区域c1~第3部分区域c3中的某一个),并以使车辆v向第1范围退避的方式对车辆v进行控制。
86.从而,本实施方式的退避控制装置100与以往的退避控制装置(例如,专利文献1中公开的装置)相比,退避的计算量减少,能够进一步抑制成本。
87.另外,本实施方式的退避控制装置100独立于自动驾驶控制装置500而设置,因此,能够廉价地提供。
88.另外,本实施方式的退避控制装置100中,不需要为了避免与对象碰撞,而使车辆v等待对象的移动。因此,本实施方式的退避控制装置100能够实现快速的退避,能够提高安全性。
89.此外,本发明中,不限定于上述实施方式的说明,在不脱离其主旨的范围内可以进行各种变形。以下,对变形例进行说明。
90.[变形例1]
[0091]
也可以根据车辆v的速度决定退避区域的大小。例如,也可以是,识别装置300以车辆v的速度越快则使车辆v的前方的区域越宽敞(大)的方式决定退避区域。
[0092]
[变形例2]
[0093]
退避控制装置100也可以在车辆v进入某个部分区域后,进一步将与该部分区域相邻的部分区域分割,使车辆v退避到这些部分区域中的某一个部分区域。
[0094]
例如,在车辆v进入图3所示的部分区域c2后,控制部120以将部分区域c3进一步分割为多个部分区域的方式对部分区域c3进行识别。而且,控制部120基于对象信息,判定出进一步分割而得的部分区域中的、车辆v能够退避于其中的范围,并以使车辆v向该范围退避的方式对致动器组600进行控制。
[0095]
[变形例3]
[0096]
退避控制装置100也可以在车辆v进入某个部分区域后,再次执行图9所示的一系列的处理。
[0097]
下面,以图3所示的部分区域c1~c3中的部分区域c3被决定为可退避范围的情况为例进行说明。
[0098]
输入部110在车辆v进入部分区域c3后,接收表示作为车辆v的新的退避目的地而被决定的新的退避区域的退避区域信息、和表示在新的退避区域中被识别出的新的对象的对象信息。虽然省略了图示,但是,新的退避区域是与部分区域c3相邻的区域(例如,图3中的行人自行车道b外的区域)。
[0099]
控制部120以将退避区域信息所示的新的退避区域分割为新的多个部分区域的方式对新的退避区域进行识别,该新的多个部分区域至少包括与部分区域c3相邻的部分区域和与该部分区域相邻的部分区域。而且,控制部120基于对象信息,判定出新的多个部分区域中的、车辆v能够退避于其中的范围,并以使车辆v向该范围退避的方式,对致动器组600进行控制。
[0100]
此外,也可以在车辆v在部分区域c3内沿着其长度方向直行时执行上述的控制部120的处理。
[0101]
以上,对本发明的变形例进行了说明。也可以将上述的变形例组合来实施。
[0102]
也可以利用程序实现实施方式及各变形例中的各部的功能。在图10中示出该情况下的计算机的硬件结构例。
[0103]
如图10所示,计算机2100具备:输入按钮、触摸板等输入装置2101、显示器、扬声器等输出装置2102、cpu(central processing unit,中央处理器)2103、rom(read only memory,只读存储器)2104、和ram(random access memory,随机存取存储器)2105。另外,计算机2100具备:硬盘装置、ssd(solid state drive,固态硬盘)等存储装置2106、从dvd-rom(digital versatile disk read only memory,多用途只读数据光盘)、usb(universal serial bus,通用串行总线)存储器等存储介质读取信息的读取装置2107、和经由网络进行通信的发送接收装置2108。上述的各部通过总线2109被连接。
[0104]
而且,读取装置2107从记录有用于实现上述各部的功能的程序的存储介质读取该程序,并存储在存储装置2106中。或者,发送接收装置2108与连接于网络的服务器装置进行通信,将从服务器装置下载的用于实现上述各部的功能的程序存储在存储装置2106中。
[0105]
而且,cpu2103将存储在存储装置2106的程序复制到ram2105中,将该程序所含的指令从ram2105中依次读出并执行,从而,实现上述各部的功能。另外,在执行程序时,在ram2105或存储装置2106中,存储有通过在实施方式及各变形例中叙述过的各种处理得到的信息,可适当地利用这些信息。
[0106]
《本发明的总结》
[0107]
本发明的退避控制装置具备:输入部,接收作为存在于车道的车辆的退避目的地而被决定的退避区域的信息、和在所述退避区域中被识别出的对象的信息;以及控制部,基于所述退避区域的信息,以将所述退避区域分割为至少包括距所述车辆最近的第1部分区域和与所述第1部分区域相邻的第2部分区域的多个部分区域的方式对所述退避区域进行识别,并基于所述对象的信息,以使所述车辆向所述多个部分区域中的、所述车辆能够退避
于其中的第1范围退避的方式,对所述车辆进行控制。
[0108]
在本发明的退避控制装置中,所述控制部根据所述退避区域的宽度决定所述退避区域的分割数。
[0109]
在本发明的退避控制装置中,所述输入部在所述车辆进入所述第1范围后,接收作为所述车辆的新的退避目的地而被决定的新的退避区域的信息、和在所述新的退避区域中被识别出的新的对象的信息,所述控制部基于所述新的退避区域的信息,以将所述新的退避区域分割为至少包括与所述第1范围相邻的第3部分区域和与所述第3部分区域相邻的第4部分区域的新的多个部分区域的方式对所述新的退避区域进行识别,并基于所述新的对象的信息,以使所述车辆向所述新的多个部分区域中的、所述车辆能够退避于其中的第2范围退避的方式,对所述车辆进行控制。
[0110]
在本发明的退避控制装置中,所述控制部在所述车辆正在所述第1范围内直行时执行基于所述新的退避区域的信息及所述新的对象的信息的处理。
[0111]
在本发明的退避控制装置中,根据所述车辆的速度决定所述退避区域的大小。
[0112]
本发明的车辆具备本发明的退避控制装置。
[0113]
在本发明的车辆中,还具备识别装置,该识别装置根据所述车辆的车速决定所述退避区域的大小。
[0114]
在本发明的车辆中,还具备异常检测装置,该异常检测装置检测所述车辆中的异常,所述退避控制装置在由所述异常检测装置检测到所述异常的情况下,执行所述第1范围的判定,并使所述车辆向所述第1范围退避。
[0115]
本发明的退避控制方法包括以下工序:接收作为存在于车道的车辆的退避目的地而被决定的退避区域的信息、和在所述退避区域中被识别出的对象的信息的工序;基于所述退避区域的信息,以将所述退避区域分割为至少包括距所述车辆最近的第1部分区域和与所述第1部分区域相邻的第2部分区域的多个部分区域的方式对所述退避区域进行识别的工序;以及基于所述对象的信息,以使所述车辆向所述多个部分区域中的、所述车辆能够退避于其中的范围退避的方式,对所述车辆进行控制的工序。
[0116]
在2019年12月26日提出的日本专利申请2019-236226中包含说明书、附图及摘要的公开内容全部引用于本技术。
[0117]
工业实用性
[0118]
本发明的退避控制装置、车辆及退避控制方法能够应用于使车辆退避的所有技术。
[0119]
附图标记说明
[0120]
100 退避控制装置
[0121]
110 输入部
[0122]
120 控制部
[0123]
200 周边检测装置
[0124]
300 识别装置
[0125]
400 异常检测装置
[0126]
500 自动驾驶控制装置
[0127]
600 致动器组
[0128]
2100 计算机
[0129]
2101 输入装置
[0130]
2102 输出装置
[0131]
2103 cpu
[0132]
2104 rom
[0133]
2105 ram
[0134]
2106 存储装置
[0135]
2107 读取装置
[0136]
2108 发送接收装置
[0137]
2109 总线
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1