一种基于智慧灯杆的无人机服务管控系统的制作方法
1.本发明涉及无人机管理和服务领域,具体涉及一种基于智慧灯杆上的无人机服务管控系统,尤其是一种安装于智慧灯杆上的,具备无人机监管、无人机精准引导、降落、停放、无线充电等功能的无人机停机坪。
背景技术:
2.无人机产业蓬勃发展,其以体积小、造价低、使用方便等方面的优势在各个领域广泛应用。但无人机目前缺乏有效管理,特别在城市环境,无人机的黑飞给治安管理、反恐防恐带来诸多问题,同时无人机续航时间短,在治安巡逻、水务巡查等方面难以进行长续航、长距离作业。基于以上管理需求和用户需求,建立一种既能用于城市无人机监管,又能服务于无人机用的系统迫在眉睫。而智慧灯杆广泛安装于城市各区域,是无人机服务管控系统的天然载体。
技术实现要素:
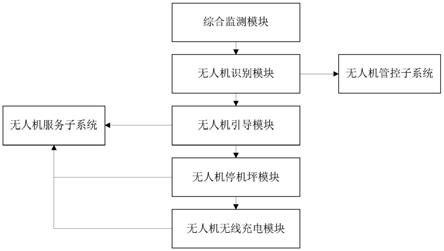
3.为了解决以上问题,本发明提供了一种基于智慧灯杆的无人机服务管控系统。如图1,其由无人机管控子系统和无人机服务子系统组成,其中无人机管控子系统由综合监测模块、无人机识别模块组成;无人机服务子系统由无人机引导模块、无人机停机坪模块、无线充电模块组成。其实现的技术方案如下:
4.综合监测模块包括环境采集传感器(采集智慧灯杆处的温度、湿度、降雨量、风力风向等信息)、无人机频谱采集传感器(采集智慧灯杆周边频谱信息,并采集周边无人机的图传及遥控频段的频谱特征信息,包括时域特征、频域特征、调制域特征等)、视频采集传感器(采集周边的视频信息)。
5.更进一步地,无人机频谱采集传感器采集频率范围为70mhz至6ghz,覆盖目前常用无人机的图传和遥控频段:5.8ghz、2.4ghz、1.4ghz、1.2ghz、915mhz、433mhz等。
6.无人机识别模块主要由cpu/gpu处理单元、存储单元等组成,通过对综合监测模块采集的无人机频谱特征信息进行分析和比对,获取无人机的品牌、型号、身份id、测向信息、距离等信息。
7.无人机管控子系统采集无人机识别模块上报的无人机信息,采用多站交叉定位、tdoa等技术手段,获取无人机的位置。从而构建无人机管控子系统,提供无人机实时运行监测、黑飞统计、无人机机型统计、重点区域入侵报警、频谱环境统计等管理信息。
8.无人机引导模块主要由通信模组(有线或无线)和信息采集网关组成,通过无人机服务子系统提供基于http协议的restful api接口。无人机操控者通过此接口申请无人机降落停靠,无人机服务子系统对无人机识别模块识别的无人机的身份id进行合规检验通过后,提供停机坪模块的精确经纬度信息、引导图示信息、环境信息、频谱信息、视频信息等,从而引导无人机精确降落。
9.进一步地,无人机操控者申请无人机降落停靠需要提供无人机的品牌、型号、身份
id、轴距、操控者身份id、支持的无线充电协议等信息;
10.进一步地,无人机的身份id合规检验主要确认信息包括:无人机识别模块采集的无人机品牌、型号、身份id和无人机操控者申请停靠提供的品牌、型号、身份id是否一致,轴距是否满足停靠要求,操控者身份id是否具备停靠权限;
11.进一步地,无人机引导模块提供的精确经纬度信息水平误差在3cm内;
12.进一步地,无人机引导模块提供的引导图示信息采用黑白两色进行标示,并在图示周边安装有led等,方便夜晚进行图像识别;
13.进一步地,无人机引导模块提供的环境信息包含温度、湿度、降雨量、风力风向;
14.进一步地,无人机引导模块提供的频谱信息包括频率时域图、幅度时域图、相位时域图、频谱瀑布图、实时频谱图等;
15.进一步地,无人机引导模块提供的视频信息包括无人机停机坪的实时视频信息,用于判断是否存在异物遮挡等情况。
16.无人机停机坪模块主要由无人机停机平台、归中装置、保护罩等组成。无人机引导模块启动工作后,自动展开保护罩。在无人机精准降落在停机平台后,通过归中装置实现对无人机停靠在平台中间位置,完成归中后,关闭保护罩,并通过无人机服务子系统通知操控者完成停机。操控者通过无人机服务子系统发布飞离指令后,展开保护罩,并在无人机飞离停机坪后,关闭保护罩。
17.无线充电模块主要由功放源和无线充电发射天线组成。通过无人机识别模块识别的信息,确认充电协议是否适配。如果适配,则进行充电,充电完成后提醒无人机操作者完成充电;如果不适配则通知无人机操作者充电协议不匹配。
18.进一步地,无线充电模块采用无人机操控者申请停靠提供的支持的无线充电协议对无人机进行无线充电;
19.无人机服务子系统基于无人机引导模块、无人机停机坪模块、无人机无线充电模块提供无人机精准引导、无人机降落及停放、无线充电、飞行区域查询、飞行报备等服务。
附图说明
20.图1为本发明所述一种基于智慧灯杆的无人机服务管控系统结构框图;
21.图2为本发明所述一种基于智慧灯杆的无人机服务管控系统流程框图;
具体实施方式
22.下面,结合附图以及具体实施方式,对本发明做进一步描述,需要说明的是,在不相冲突的前提下,以下描述的各实施例之间或各技术特征之间可以任意组合形成新的实施例。
23.请参阅图2,一种基于智慧灯杆的无人机服务管控系统,包括以下步骤:
24.s1、通过环境采集传感器采集智慧灯杆处的温度、湿度、降雨量、风力风向等环境信息;通过无人机频谱采集传感器采集智慧灯杆周边频谱信息,并采集周边无人机的图传及遥控频段的频谱特征信息,包括时域特征、频域特征、调制域特征等;通过视频采集传感器采集周边视频信息。
25.s2、无人机识别模块通过对综合监测模块采集的无人机频谱特征信息进行分析和
特征比对,获取无人机的品牌、型号、身份id等信息。
26.s3、无人机管控子系统采集无人机识别模块上报的无人机信息,通过对多个智慧灯杆上的无人机信息的采集和综合分析,采用多站交叉定位、tdoa等技术手段,获取无人机的位置,并面向监管部门提供无人机实时运行监测、黑飞统计、无人机机型统计、重点区域入侵报警、频谱环境统计等管理信息。
27.s4、无人机操控者通过无人机服务子系统提供基于http协议的restful api接口申请无人机降落停靠,无人机服务子系统对无人机识别模块识别的无人机的身份id进行合规检验通过后,提供停机坪模块的精确经纬度信息、引导图示信息、环境信息、频谱信息、视频信息等,无人机操控者通过对以上信息的综合分析,确认是否具备精确降落条件,如果具备则基于以上信息引导无人机精确降落。
28.进一步地,无人机操控者申请无人机降落停靠需要提供无人机的品牌、型号、身份id、轴距、操控者身份id、支持的无线充电协议等信息;
29.进一步地,无人机的身份id合规检验主要确认信息包括:无人机识别模块采集的无人机品牌、型号、身份id和无人机操控者申请停靠提供的品牌、型号、身份id是否一致,轴距是否满足停靠要求,操控者身份id是否具备停靠权限;
30.进一步地,无人机引导模块提供的精确经纬度信息水平误差在3cm内;
31.进一步地,无人机引导模块提供的引导图示信息采用黑白两色进行标示,并在图示周边安装有led等,方便夜晚进行图像识别;
32.进一步地,无人机引导模块提供的环境信息包含温度、湿度、降雨量、风力风向;
33.进一步地,无人机引导模块提供的频谱信息包括频率时域图、幅度时域图、相位时域图、频谱瀑布图、实时频谱图等;
34.进一步地,无人机引导模块提供的视频信息包括无人机停机坪的实时视频信息,用于判断是否存在异物遮挡等情况。
35.s5、无人机引导模块启动工作后,自动展开保护罩。在无人机精准降落在停机平台后,通过归中装置实现对无人机停靠在平台中间位置,完成归中后,关闭保护罩,并通过无人机服务子系统通知操控者完成停机。操控者通过无人机服务子系统发布飞离指令后,展开保护罩,并在无人机飞离停机坪后,关闭保护罩。
36.s6、无线充电模块主要由功放源和无线充电发射天线组成。通过无人机识别模块识别的信息,确认充电协议是否适配。如果适配,则进行充电,充电完成后提醒无人机操作者完成充电;如果不适配则通知无人机操作者充电协议不匹配。
37.进一步地,无线充电模块采用无人机操控者申请停靠提供的支持的无线充电协议对无人机进行无线充电。
38.无人机服务子系统基于无人机引导模块、无人机停机坪模块、无人机无线充电模块提供无人机精准引导、无人机降落及停放、无线充电、飞行区域查询、飞行报备等服务。
39.上述实施方式仅为本发明的优选实施方式,不能以此来限定本发明保护的范围,本领域的技术人员在本发明的基础上所做的任何非实质性的变化及替换均属于本发明所要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1