一种前碰撞预警系统的报警方法及参数实时调校方法与流程
本发明涉及汽车技术领域,尤其涉及一种前碰撞预警系统的报警方法及参数实时调校方法。
背景技术:
fcw(forwardcollisionwarning,前碰撞预警)系统是一种高级安全辅助系统,它通过感应和计算在行驶过程中车辆与前车的距离来判断潜在的碰撞风险,并立即发出警示。
但是现有技术中,若干个碰撞距离区间段的报警级别相同,通常会有大概3到4个碰撞距离区间段,这就会导致不同危险情况却对应同一个危险报警级别,体验不佳。
技术实现要素:
本发明的一个目的在于提供一种前碰撞预警系统的报警方法,其能够根据不同的危险情况进行不同级别的报警,体验较佳。
如上构思,本发明所采用的技术方案是:
一种前碰撞预警系统的报警方法,前碰撞预警系统内存储有报警参数,所述报警参数包括报警距离阈值dw、制动距离阈值db和比较参数h,0<h<1,前碰撞预警系统能够采集到车辆与当前前方障碍物之间的距离d,定义判断参数e=(d-db)/(dw-db),所述前碰撞预警系统能够实时生成所述判断参数e;
前碰撞预警系统的报警方法包括以下步骤:
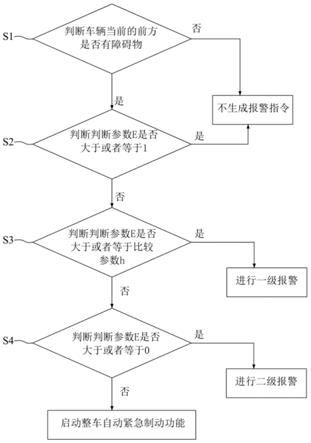
s1、判定车辆当前的前方是否有障碍物,如果否,则不生成报警指令;如果是,则执行步骤s2;
s2、判断所述判断参数e是否大于或者等于1;如果是,则不生成报警指令;如果否,则执行步骤s3;
s3、判断所述判断参数e是否大于或者等于所述比较参数h,如果是,则进行一级报警;如果否,则执行步骤s4;
s4、判断所述判断参数e是否大于或者等于0,如果是,则进行二级报警;如果否,则启动整车自动紧急制动功能。
可选地,所述报警参数还包括雷达感知设定阈值k1和摄像头感知设定阈值l1,所述前碰撞预警系统能够实时采集雷达感知阈值和摄像头感知阈值;
所述步骤s1中,当所述雷达感知阈值大于k1且所述摄像头感知阈值大于l1时,判定车辆当前的前方有障碍物;
当所述雷达感知阈值大于k1且所述摄像头感知阈值小于l1且所述雷达感知阈值持续第一设定时长均大于k1时,判定车辆当前的前方有障碍物;
当所述雷达感知阈值小于k1且所述摄像头感知阈值小于l1时,判定车辆当前的前方没有障碍物;
当所述雷达感知阈值小于k1且所述摄像头感知阈值大于l1且摄像头持续第二设定时长均大于l1,判定车辆当前的前方有障碍物。
可选地,所述前碰撞预警系统包括仪表报警模块,所述一级报警为所述仪表报警模块报警。
可选地,所述仪表报警模块的报警形式为发出声信号和/或光信号。
可选地,所述前碰撞预警系统包括座椅报警模块,所述二级报警为所述座椅报警模块和所述仪表报警模块同时报警。
可选地,所述座椅报警模块的报警形式为所述座椅报警模块振动。
可选地,所述报警参数还包括方向盘的比较角度s;
在所述步骤s1前还需要执行:
s0、判断车辆的转向灯是否开启,并判断方向盘的转向角度;若车辆的转向灯开启或者方向盘的转角超过所述比较角度s时,不生成报警指令;否则,执行步骤s1。
本发明的另一目的在于提供一种前碰撞预警系统的参数实时调校方法,用于对上述的前碰撞预警系统的报警方法的报警参数进行实时调校,以使得前碰撞预警系统的报警方法体验更佳。
如上构思,本发明所采用的技术方案是:
一种前碰撞预警系统的参数实时调校方法,用于对上述的前碰撞预警系统的报警方法的报警参数进行实时调校,包括以下步骤:
s01、将外部诊断设备与前碰撞预警系统的fcw控制器模块通讯连接;
s02、控制所述外部诊断设备向所述fcw控制器模块发送参数调整命令;
s03、所述fcw控制器模块根据参数调整命令调整所述前碰撞预警系统内存储的报警参数;
s04、根据调整后的所述报警参数,执行所述前碰撞预警系统的报警方法。
可选地,在所述步骤s02中,所述外部诊断设备向所述fcw控制器模块发送进入工厂命令模式且成功后,所述外部诊断设备再向所述fcw控制器模块发送参数调整命令。
可选地,所述fcw控制器模块包括诊断单元,在所述步骤s01中,所述外部诊断设备与所述诊断单元通讯连接。
本发明提出的前碰撞预警系统的报警方法,能够根据不同的场景进行不同级别的报警,体验更佳,可以实现不同程度的危险情况对应不同程度的报警感觉。通过定义判断参数e,不同范围的判断参数e对应不同级别的报警,能够更加真实的将实时危险通过报警的不同级别提醒给驾驶员。
本发明提出的前碰撞预警系统的参数实时调校方法可以进行实车参数调整,即其能够在实车性能验证的过程中,通过外部诊断设备直接对相应参数进行调校,调校完之后生成新的前碰撞预警系统的报警逻辑,新逻辑能够实时实地进行验证,完全复现上一次出现问题的路况的二次验证效果,若有问题能够继续进行参数调校和实车验证,节约大量的时间及人力物力成本,相较于传统两轮非实时在线调校可以缩短80%左右的开发周期,以较低的成本获得更好的前碰撞预警系统的报警体验。
附图说明
图1是本发明实施例提供的前碰撞预警系统的组成示意图;
图2是本发明实施例提供的前碰撞预警系统的报警方法的流程图;
图3是本发明实施例提供的前碰撞预警系统的参数实时调校方法的流程图。
图中:
1、fcw控制器模块;11、诊断单元;12、参数单元;13、fcw报警逻辑单元;14、新逻辑;2、转向灯感知模块;3、前毫米波雷达模块;4、前摄像头模块;5、速度感知模块;6、方向盘转角感知模块;
7、仪表报警模块;8、座椅报警模块;
10、外部诊断设备。
具体实施方式
为使本发明解决的技术问题、采用的技术方案和达到的技术效果更加清楚,下面结合附图并通过具体实施方式来进一步说明本发明的技术方案。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部。
参见图1和图2,本实施例提供一种前碰撞预警系统的报警方法。
前碰撞预警系统包括fcw控制器模块1、转向灯感知模块2、前毫米波雷达模块3、前摄像头模块4、速度感知模块5、方向盘转角感知模块6、仪表报警模块7和座椅报警模块8。其中,转向灯感知模块2、前毫米波雷达模块3、前摄像头模块4、速度感知模块5、方向盘转角感知模块6、仪表报警模块7和座椅报警模块8均与fcw控制器模块1通讯连接。
具体地,前毫米波雷达模块3和前摄像头模块4负责感知前方道路信息,负责识别前方车辆以及行人的情况,包括前方行人以及车辆行进的方向、速度以及距离本车的距离。前毫米波雷达模块3和前摄像头模块4能够分别通过私有can将识别到的外部环境信息传给fcw控制器模块1。fcw控制器模块1根据识别到的外部环境信息进行判断是否需要生成报警指令给仪表报警模块7和/或座椅报警模块8。
具体地,fcw控制器模块1包括环境感知处理单元、fcw报警逻辑单元13、诊断单元11、参数单元12和报警逻辑单元。
前碰撞预警系统内存储有报警参数,报警参数包括报警距离阈值dw、制动距离阈值db和比较参数h,0<h<1,前碰撞预警系统能够采集到车辆与当前前方障碍物之间的距离d,定义判断参数e=(d-db)/(dw-db),前碰撞预警系统能够实时生成判断参数e。
具体地,报警参数均存储在参数单元12中。
具体地,前碰撞预警系统的报警方法包括以下步骤:
s1、判定车辆当前的前方是否有障碍物,如果否,则不生成报警指令;如果是,则执行步骤s2。
具体地,报警参数还包括雷达感知设定阈值k1和摄像头感知设定阈值l1,前碰撞预警系统能够实时采集雷达感知阈值和摄像头感知阈值。
在步骤s1中,由环境感知处理单元判断前方是否有障碍物,具体地,环境感知处理单元的判断逻辑为:当雷达感知阈值大于k1且摄像头感知阈值大于l1时,判定车辆当前的前方有障碍物;当雷达感知阈值大于k1且摄像头感知阈值小于l1且雷达感知阈值持续第一设定时长均大于k1时,判定车辆当前的前方有障碍物;当雷达感知阈值小于k1且摄像头感知阈值小于l1时,判定车辆当前的前方没有障碍物;当雷达感知阈值小于k1且摄像头感知阈值大于l1且摄像头持续第二设定时长均大于l1,判定车辆当前的前方有障碍物。
具体地,步骤s1中,第一设定时长为m1个设定时长;第二设定时长为n1个设定时长。具体地,设定时长由设计人员决定。具体地,k1和l1为存储在参数单元12内的报警参数。
s2、判断判断参数e是否大于或者等于1;如果是,则不生成报警指令;如果否,则执行步骤s3。
s3、判断判断参数e是否大于或者等于比较参数h,如果是,则进行一级报警;如果否,则执行步骤s4。
具体地,在步骤s3中,一级报警为仪表报警模块7报警。进一步地,仪表报警模块7的报警形式为发出声信号和/或光信号。当提示一级报警时,驾驶员需要松油门,注意前方路况。
具体地,仪表报警模块7的报警形式为发出声信号和光信号时,仪表报警模块7的声信号和光信号的频率相同。
进一步地,报警参数还包括一级报警频率q1,一级报警频率q1为一级报警中仪表报警模块7的声信号或光信号的频率。
s4、判断判断参数e是否大于或者等于0,如果是,则进行二级报警;如果否,则启动整车自动紧急制动功能。
具体地,在步骤s4中,二级报警为座椅报警模块8和仪表报警模块7同时报警。具体地,座椅报警模块8的报警形式为座椅报警模块8振动。当提示二级报警时,驾驶员需要进行制动,以避免碰撞。
具体地,报警参数还包括二级报警频率q2,二级报警频率q2为二级报警中仪表报警模块7的声信号和光信号的频率。
本实施例提供的前碰撞预警系统的报警方法,能够根据不同的场景进行不同级别的报警,体验更佳,可以实现不同程度的危险情况对应不同程度的报警感觉。通过定义判断参数e,不同范围的判断参数e对应不同级别的报警,能够更加真实的将实时危险通过报警的不同级别提醒给驾驶员。
优选地,报警参数还包括方向盘的比较角度s;在步骤s1前还需要执行:
s0、判断车辆的转向灯是否开启,并判断方向盘的转向角度;若车辆的转向灯开启或者方向盘的转角超过比较角度s时,不生成报警指令;否则,执行步骤s1。即本实施例中,前碰撞预警系统的报警判断前提为:驾驶员没有打开转向灯,或者方向盘的转动角度不超过比较角度s。
现有技术中,前碰撞预警系统的报警阈值以及报警形式的调校方法通常是对fcw(forwardcollisionwarning,前碰撞预警系统)系统进行前期仿真标定,将仿真标定的fcw参数加载到整车中的fcw控制器中,之后进行实车系统性能验证,之后针对验证过程中发现的问题进行再次标定调整,之后在进行仿真优化,将优化后的参数再次加载到实车控制器中进行验证,直达性能满足要求为止。
现有技术的调校方法存在以下弊端:
(1)每次参数调整都需要回到实验室或者研发单位进行参数修改,以及仿真验证,该过程会持续很长时间一般为数个月左右时间,如果一次调整优化不达标还要再次进行调整优化,每次持续几个月的时间,这样会导致整车开发周期增加,会带来成本费用的增加;
(2)上述的调校方法为非实时在线方式,通常需要调校两轮,导致前碰撞预警系统往往存在误触发以及触发的时机不令人满意的情况,比如触发时间过早导致本来没有碰撞风险却提醒驾驶员造成驾驶员抱怨,再比如fcw触发过晚导致真的会发生碰撞但是提醒的时间晚了,留给驾驶员的反应时间不足,再比如fcw触发过程中前车突然加速导致整个风险解除的时候fcw还是提醒驾驶员有危险也会给驾驶员带来比较大的困惑。
为解决现有技术的调校方法存在的弊端,参见图3,本实施例还提供一种前碰撞预警系统的参数实时调校方法,用于对上述的前碰撞预警系统的报警方法中的报警参数进行实时调校。
具体地,前碰撞预警系统的参数实时调校方法包括以下步骤:
s01、将外部诊断设备10与前碰撞预警系统的fcw控制器模块1通讯连接;
s02、控制外部诊断设备10向fcw控制器模块1发送参数调整命令;
s03、fcw控制器模块1根据参数调整命令调整前碰撞预警系统内存储的报警参数;
s04、根据调整后的报警参数,执行前碰撞预警系统的报警方法。
具体地,在步骤s02中,外部诊断设备10向fcw控制器模块1发送进入工厂命令模式且成功后,外部诊断设备10再向fcw控制器模块1发送参数调整命令。
进一步地,fcw控制器模块1包括诊断单元11,在步骤s01中,外部诊断设备10与诊断单元11通讯连接。
具体地,如图3所示,在实车进行参数实时调校时,先将外部诊断设备10与前碰撞预警系统的fcw控制器模块1的诊断单元11通讯连接。
外部诊断设备10根据外部操作发送“进入扩展模式命令”给诊断单元11,诊断单元11若未成功响应“进入扩展模式命令”,则发送“未成功提醒”给外部诊断设备10,若成功响应“进入扩展模式命令”,则发送“第一成功提醒”给外部诊断设备10。
外部诊断设备10接收到“第一成功提醒”后,发送“安全校验命令”给诊断单元11,诊断单元11若确定安全校验不通过,则发送“未通过校验提醒”给外部诊断设备10,若确定安全校验通过,则发送“通过校验提醒”给外部诊断设备10。
外部诊断设备10接收到“通过校验提醒”后,发送“进入工厂模式命令”给诊断单元11,诊断单元11若未成功进入工厂模式,则发送“未成功提醒”给外部诊断设备10,若成功进入工厂模式,则发送“第二成功提醒”给外部诊断设备10。
外部诊断设备10接收到“第二成功提醒”后,发送“参数调整命令”给诊断单元11,诊断单元11将“参数调整命令”中的新参数发送给参数单元12,参数单元12识别新参数是否在参数预设范围内,若参数单元12识别到新参数不在参数预设范围内,则判定为误操作并向诊断单元11发送“参数调整不成功命令”,若参数单元12识别到新参数在参数预设范围内,参数单元12将待调整参数更新为“参数调整命令”中的新参数,fcw报警逻辑单元13实时调用新参数以形成新逻辑14,前碰撞预警系统的报警方法按照新逻辑14进行报警。
若新逻辑14成功报警后则向诊断单元11发送“第三成功提醒”;若新逻辑14未能执行则向诊断单元11“未成功提醒”。
具体地,参数调整命令能够调整的参数包括报警距离阈值dw、制动距离阈值db、m1、n1、比较角度s、一级报警频率q1、二级报警频率q2和l1。值得注意的是,新逻辑14仅对报警参数进行调校。
本实施例提供的前碰撞预警系统的参数实时调校方法可以进行实车参数调整,即其能够在实车性能验证的过程中,通过外部诊断设备10直接对相应参数进行调校,调校完之后生成新的前碰撞预警系统的报警逻辑,新逻辑14能够实时实地进行验证,完全复现上一次出现问题的路况的二次验证效果,若有问题能够继续进行参数调校和实车验证,节约大量的时间及人力物力成本,相较于传统两轮非实时在线调校可以缩短80%左右的开发周期。
以上实施方式只是阐述了本发明的基本原理和特性,本发明不受上述实施方式限制,在不脱离本发明精神和范围的前提下,本发明还有各种变化和改变,这些变化和改变都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
- 还没有人留言评论。精彩留言会获得点赞!