一种车路协同环境下的信号协同控制方法、装置及存储介质
1.本发明涉及智能交通控制领域,具体涉及一种车路协同环境下的信号协同控制方法。
背景技术:
2.随着计算机、车辆工程、无线通信等领域核心技术的突破和不断推进,智能网联汽车、无人驾驶汽车作为汽车未来的发展方向,对于汽车行业、交通运输行业有着深远的影响,科研人员不断在技术上实现突破,不断完善智能车的各项性能指标,使道路交通安全和交通效率不断提高。
3.在智能网联车运行过程中,为达到较高的运行效率,智能网联车辆在道路中会呈单条车队形式行驶,本发明探讨在车路协同下智能网联车队通过交叉口的情况,为使智能网联车队能够在尽可能短的时间内全部通过交叉口,需要从空间和时间两个角度进行研究,在空间上,若智能网联车队到达交叉口时,车队运行方向为红灯,则需要将智能网联车队打散到进口道车队运行方向的各条车道上,若车队运行方向是绿灯,则在通过交叉口时保持智能网联车的单条车队形式;在时间上,若智能网联车队到达交叉口时,车队运行方向为红灯,则需要调整下一周期智能网联车队运行方向的绿灯时间,使智能网联车队能够在下一周期全部通过交叉口,若车队运行方向为绿灯,则判断是否需要延长该相位的绿灯时间,以保证智能网联车队能够在当前相位全部通过交叉口,总体而言,就是需要在车路协同的环境下,使智能网联车队能够尽可能迅速地通过交叉口。已有研究中,中国专利cn201410500292.5提出了一种信号交叉口车路协同避免公交车冲突方法,通过车路协同控制信号灯给予公交车优先通行的专用相位,从而避免了冲突的发生;中国专利cn201910445327.2提出了一种基于车路通信的连续交叉口协同优化方法,以交叉口群作为车路协同的控制研究对象,分析车路协同环境下交叉口控制方案对相邻交叉口群协调关系的扰动,实现了交叉口群的通行效率最优。总体而言,现有针对智能网联车的车路协同研究多集中于从信号配时优化的角度实现单辆智能网联车的运行效率最优,很少考虑由多辆不同模式的智能网联车组成的智能网联车队从车道分配和信号配时两个角度进行的车路协同优化,以实现智能网联车通过交叉口的效率最优。
技术实现要素:
4.发明目的:为了克服上述现有技术的不足,本发明目的在于提出一种车路协同环境下的信号协同控制方法,基于交叉口的现有信号配时和车道划分、以及智能网联车队的运行状态信息,以智能网联车队和信号配时方案为研究对象,以红灯时长、车道数、智能网联车队车头时距、车队长度、大车比例为基础,为保证智能网联车队能够至少在下一周期内全部通过交叉口,计算信号配时方案中智能网联车队运行方向的绿灯时间应满足的最短时间,以此为依据确定调整后该相位最终的绿灯时长,并执行所确定的交叉口信号协同控制方法。使智能网联车队在交叉口的运行效率大大提高,进而提高了智能网联车辆的通行效
率。
5.技术方案:为解决上述技术问题,本发明采用的技术方案为:一种车路协同环境下信号协同控制方法,该方法包括如下步骤:
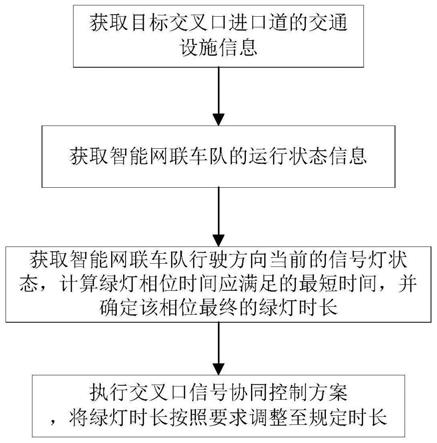
6.(1)获取目标交叉口进口道的交通设施信息,所述交通设施信息包括交叉口信号配时方案和进口道车道划分;
7.(2)获取智能网联车队距离交叉口进口道停车线的时间为t秒时的运行状态信息,所述智能网联车队的运行状态信息包括智能网联车队的车辆数、大型车比例、车头时距、小型车换道的延误时间,假定智能网联车队以单条车队形式行驶,其中,t为预设的交叉口信息交互时间;
8.(3)若智能网联车队距离交叉口进口道停车线t秒时智能网联车队行驶方向的信号灯为绿灯,计算智能网联车队能通过的该相位绿灯的理论最小剩余时间,若绿灯的实际剩余时间小于理论最小剩余时间,将该相位的绿灯时间延长至理论最小绿灯时间;
9.计算该相位绿灯的理论最小剩余时间g
min
:
10.g
min
=t+ρ
×
n
×
t
hc
+(1
‑
ρ)
×
n
×
t
hv
11.其中,n是智能网联车队的车辆数,ρ是智能网联车队中的大型车比例,t
hc
是智能网联车队中大型车的平均车头时距,t
hv
是智能网联车队中小型车的平均车头时距;
12.(3)若智能网联车队距离交叉口进口道停车线t秒时智能网联车队行驶方向的信号灯为红灯,计算下一周期应满足的最短绿灯时间,若下一周期的绿灯时间小于该应满足的最短绿灯时间,则将下一周期的绿灯时间延长至应满足的最短绿灯时间;
13.令当智能网联车队距离交叉口进口道停车线t秒时,红灯剩余时间为r;
14.若红灯剩余时间r小于t,即在智能网联车队到达进口道停车线前,智能网联车队行驶方向的信号灯变为绿灯,计算绿灯时间应满足的最短时间g
min
:
15.g
min
=(t+ρ
×
n
×
t
hc
+(1
‑
ρ)
×
n
×
t
hv
)
‑
r
16.若红灯剩余时间r大于等于t,即智能网联车队在驶入进口道前被打散,均匀分配至其行驶方向的各条车道上,当下一周期该行驶方向绿灯启亮时,智能网联车队开始依次通过交叉口,计算绿灯时间应满足的最短时间g
min
:
[0017][0018][0019][0020]
g
min
=max{g
1,min,
g
2,min
}
[0021]
其中,n是智能网联车队行驶方向的车道数,d
a
是智能网联车队打散时的总延误时间,t
h
是智能网联车队的平均车头时距,d是小型车打散时的平均延误时间,θ是智能网联车队打散时的大型车换算系数,d
b
是智能网联车队的启动损失时间,其中,d、θ、 d
b
由智能网联车实验预设得到。
[0022]
本发明提出一种车路协同环境下信号协同控制方法确定装置,该装置包括如下模块:
[0023]
交叉口信息感知模块,用于获取交叉口信号配时方案和进口道车道划分,以及智能网联车队距离交叉口进口道停车线为t秒时智能网联车队运行方向信号灯头的颜色;
[0024]
智能网联车队状态感知模块,用于获取智能网联车队距离交叉口进口道停车线为t 秒时的运行状态信息,所述智能网联车队的运行状态信息包括智能网联车队的车辆数、大车比例、车头时距、预设的小车换道的延误时间;
[0025]
信号协同控制方法计算模块,用于计算为保证智能网联车队能够至少在下一周期内全部通过交叉口所需的最短绿灯时长;
[0026]
信号协同控制方法实施模块,用于执行信号协同控制方法计算模块所确定的交叉口信号协同控制方法。
[0027]
本发明提出一种计算装置,该装置包括处理器、存储器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现所述的一种车路协同环境下信号协同控制方法的步骤。
[0028]
本发明提出一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现所述的一种车路协同环境下信号协同控制方法的步骤。
[0029]
有益效果:与现有技术相比,本发明的技术方案具有以下有益效果:
[0030]
本发明提出的一种车路协同环境下的信号协同控制方法,基于交叉口的现有信号配时和车道划分、以及智能网联车队的运行状态信息,以智能网联车队和信号配时方案为研究对象,以红灯时长、车道数、智能网联车队车头时距、车队长度、大车比例为基础,为保证智能网联车队能够至少在下一周期内全部通过交叉口,计算信号配时方案中智能网联车队运行方向的绿灯时间应满足的最短时间,以此为依据确定调整后该相位最终的绿灯时长,并执行所确定的交叉口信号协同控制方法。本发明提供的方法将大型车引入智能网联车队,综合考虑了不同信号灯头颜色下的绿灯相位时间计算方法,同时将智能网联车队的运行状态数据,包括:车队长度、大车比例等,作为参数引入交叉口的信号配时当中,实现了智能网联车队在车路协同环境下的信号协同控制,保证了智能网联车队能够至少在下一周期全部通过交叉口,使智能网联车队在交叉口的运行效率大大提高,进而提高了智能网联车辆的通行效率。
附图说明
[0031]
图1是本发明实施例的方法流程图;
[0032]
图2是本发明实施例的实例中智能网联车队驶入交叉口前的交通状况示意图;
[0033]
图3是本发明实施例的装置结构示意图。
具体实施方式
[0034]
为了使本发明的内容更容易被清楚的理解,下面结合附图和具体实施例对本发明作进一步详细的说明。
[0035]
本发明提出一种车路协同环境下信号协同控制方法及装置,包括如下步骤:
[0036]
(1)获取目标交叉口进口道的交通设施信息,所述交通设施信息包括交叉口信号配时方案和进口道车道划分;
[0037]
(2)获取智能网联车队距离交叉口进口道停车线的时间为t秒时的运行状态信息,所述智能网联车队的运行状态信息包括智能网联车队的车辆数、大车比例、车头时距、小车换道的延误时间,假定智能网联车队以单条车队形式行驶,其中t为预设的交叉口信息交互时间;
[0038]
(3)a.若智能网联车队距离交叉口进口道停车线t秒时智能网联车队行驶方向的信号灯为绿灯,计算智能网联车队能通过的该相位绿灯的理论最小剩余时间,若绿灯的实际剩余时间小于理论最小剩余时间,将该相位的绿灯时间延长至理论最小绿灯时间;
[0039]
计算该相位绿灯的理论最小剩余时间g
min
:
[0040]
g
min
=t+ρ
×
n
×
t
hc
+(1
‑
ρ)
×
n
×
t
hv
[0041]
其中,n是智能网联车队的车辆数,ρ是智能网联车队中的大车比例,t
hc
是智能网联车队中大型车的平均车头时距,t
hv
是智能网联车队中小型车的平均车头时距。
[0042]
(3)b.若智能网联车队距离交叉口进口道停车线t秒时智能网联车队行驶方向的信号灯为红灯,计算下一周期该相位绿灯时间应满足的最短时间,若下一周期的绿灯时间小于应满足的最短时间,将该下一周期的绿灯时间延长至应满足的最短时间;
[0043]
令当智能网联车队距离交叉口进口道停车线t秒时,红灯剩余时间为r;
[0044]
若红灯剩余时间r小于t,即在智能网联车队到达进口道停车线前,智能网联车队行驶方向的信号灯变为绿灯,计算绿灯时间应满足的最短时间g
min
:
[0045]
g
min
=(t+ρ
×
n
×
t
hc
+(1
‑
ρ)
×
n
×
t
hv
)
‑
r
[0046]
其中,各符号表示含义与上述公式相同
[0047]
若红灯剩余时间r大于等于t,即智能网联车队在驶入进口道前会被打散,均匀分配至其行驶方向的各条车道上,当下一周期该行驶方向绿灯启亮时,智能网联车队开始依次通过交叉口,计算绿灯时间应满足的最短时间g
min
:
[0048][0049][0050][0051]
g
min
=max{g
1,min,
g
2,min
}
[0052]
其中,n是智能网联车队行驶方向的车道数,d
a
是智能网联车队打散时的总延误时间,t
h
是智能网联车队的平均车头时距,d是小车打散时的平均延误时间,θ是智能网联车队打散时的大车换算系数,d
b
是智能网联车队的启动损失时间,其中,d、θ、d
b
由智能网联车实验预设得到;
[0053]
(4)执行由权利要求书1步骤(3)的方法确定的交叉口信号协同控制方法,将下一周期或当前周期的绿灯时长按照要求调整至规定时长,以保证智能网联车队能够至少在下一周期全部通过交叉口。
[0054]
下面根据某交通示例对本发明作进一步阐述。
[0055]
交通示例:某一智能网联车队行驶在一条四车道道路上,需直行通过前方交叉口,该智能网联车队由8辆智能网联车组成,其中有两辆为大型车,其余为小型车,目标交叉口
进口道从左至右依次为左转专用车道、直行车道、直行车道和直右车道,预设的交叉口信息交互时间t为4秒,已知当该智能网联车队距离前方交叉口为4秒时,直行方向信号灯为红灯,剩余红灯时长r为8秒,其他参数中,小车打散时的平均延误时间d 为2s,大车换算系数θ为1.5,智能网联车队的启动损失时间d
b
为2s,智能网联车队的平均车头时距t
h
是2s。
[0056]
以下将采用本发明提出的一种智能车换道行为风险等级的确定方法:
[0057]
因为红灯剩余时间r大于等于t,即智能网联车队在驶入进口道前会被打散,均匀分配至其行驶方向的各条车道上,当下一周期该行驶方向绿灯启亮时,智能网联车队开始依次通过交叉口,计算绿灯时间应满足的最短时间g
min
:
[0058][0059][0060][0061]
g
min
=max{g
1,min,
g
2,min
}
[0062]
=max{3.6,7.3}
[0063]
=7.3s
[0064]
根据上述计算结果,为保证智能网联车队在下一绿灯相位能够全部释放,确定绿灯相位的最短时间为7.3s,并以此为依据调整交叉口的信号配时方案。
[0065]
如图3所示,本发明实施例公开的一种车路协同环境下信号协同控制方法确定装置,包括:交叉口信息感知模块、智能网联车队状态感知模块、信号协同控制方法计算模块和信号协同控制方法实施模块;其中,交叉口信息感知模块,用于获取交叉口信号配时方案和进口道车道划分,以及智能网联车队距离交叉口进口道停车线为t秒时智能网联车队运行方向信号灯头的颜色;智能网联车队状态感知模块,用于获取智能网联车队距离交叉口进口道停车线为t秒时的运行状态信息,所述智能网联车队的运行状态信息包括智能网联车队的车辆数、大车比例、车头时距、预设的小车换道的延误时间;信号协同控制方法计算模块,用于根据权利要求书1步骤(3)所述的方法计算交叉口的信号配时方案;信号协同控制方法实施模块,用于执行根据权利要求书1步骤(3)所述的方法确定的交叉口信号协同控制方法。
[0066]
显然,上述实施例仅仅是为清楚地说明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或
变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本发明创造的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1