一种基于视觉分析的交通信号灯控制系统的制作方法
1.本发明属于智能交通技术领域,特别是涉及一种基于视觉分析的交通信号灯控制系统。
背景技术:
2.随着城市化进程的不断加快,我国机动车保有量不断上升,交通堵塞现象也愈发严重。除了通过修路改善交通外,对交通信号灯的控制已成为现代城市交通监控指挥系统中重要的组成部分。我国地面交通控制主要依靠交通信号灯来进行,通过红黄绿三色信号灯对路口车辆及行人进行控制。
3.目前,国内红绿灯控制系统中,红绿灯切换的时间间隔主要有固定时间及分时段固定时间的方式,或者根据该路段路口的交通状况安排交通协管人员维持秩序,辅助交通信号灯。前者不能根据实施交通状况合理的调节红绿灯切换时间间隔,可能导致路口处某个方向车辆及行人数量过多,后者浪费了大量人力物力。这两种方式都无法满足现代交通信号灯控制的要求。
4.近年来,视频检测技术已成为智能交通领域最重要的信息采集手段。目前已有的交通信号灯控制系统主要通过位于路口的摄像头检测该路段车辆及行人的数量,以动态调整红绿灯切换时间。但早晚高峰时期,车辆拥堵时往往排起长队,位于路口处的摄像头仅能检测视场范围内的车辆及行人数量,并且仅由单一视频源进行数量检测,会产生较大的误差,造成交通灯控制系统的错判,甚至会加重交通堵塞现象。
技术实现要素:
5.为了解决上述技术问题,本发明提供一种基于视觉分析的交通信号灯控制系统,根据该路段的车流量大小自动调节红绿灯切换时间,使得车辆及行人数量多的方向红灯时间变短,另一方向红灯时间延长,以缓解路口的通行压力。
6.为实现上述目的,本发明提出一种基于视觉分析的交通信号灯控制系统,包括:视频信号采集系统和云平台检测控制系统;
7.所述视频信号采集系统,用于采集路口处或者目标道路上的车辆和行人视频数据,并上传至云平台检测控制系统;所述云平台检测控制系统,用于对采集的车辆和行人视频数据进行检测,并根据检测的结果控制红绿灯切换的时间间隔。
8.优选地,所述视频信号采集系统,包括:无人机航拍模块和近场数据采集模块;
9.所述无人机航拍模块,用于采集非高峰时期路口处的车辆和行人视频数据,并将采集的视频数据上传至所述云平台检测控制系统;所述近场数据采集模块,用于采集早晚高峰时期目标道路上的车辆和行人视频数据,并将采集的视频数据上传至所述云平台检测控制系统。
10.优选地,所述近场数据采集模块,包括:摄像头、摄像头支架,数据传输装置;所述摄像头支架用于将所述摄像头固定于路口处红绿信号灯旁;所述摄像头用于采集非高峰时
期路口处的车辆和行人视频数据;所述数据传输装置用于将所述摄像头采集的视频数据上传至所述云平台检测控制系统。
11.优选地,所述无人机航拍模块,包括:无人机、航拍摄像头,无线通信装置;所述无人机用于搭载所述航拍摄像头;所述航拍摄像头用于采集早晚高峰时期的目标道路上的车辆及行人视频信息;所述无线通信装置用于将所述航拍摄像头采集到的视频数据上传至所述云平台检测控制系统。
12.优选地,所述云平台检测控制系统,包括:车辆及行人检测模块、信号灯控制模块;所述车辆及行人检测模块,用于接收所述视频信号采集系统采集的车辆和行人视频数据,并检测出当前的车流量和人流量信息传输给所述信号灯控制模块;所述信号灯控制模块,用于接收当前车流量和人流量信息,并根据接收的信息设定红绿灯切换时间间隔和控制红绿灯的状态。
13.优选地,所述车辆及行人检测模块,包括:第一接受器和处理器;所述第一接收器,用于接收路口处或者目标道路上的车辆和行人视频数据,并传输给所述处理器;所述处理器,用于对路口处或者目标道路上的车辆和行人视频数据进行检测,检测出当前的车流量和人流量信息,并传输给所述信号灯控制模块;
14.所述处理器采用yolov4算法对车辆及行人视频数据进行检测。
15.优选地,所述信号灯控制模块,包括:第二接收器和第一单片机;所述第二接收器,用与接收当前的车流量和人流量信息并传输给所述单片机;所述第一单片机,用于根据当前的车流量和人流量信息设定红绿灯切换的时间间隔,并通过电信号控制红绿灯的状态。
16.优选地,所述数据传输装置是通过rs
‑
485进行有线传输,包括:第二单片机和rs
‑
485总线;所述第二单片机用于对采集的非高峰时期路口处的车辆和行人视频数据进行变换,使其符合rs
‑
485协议,并通过数据线进行数据传输;
17.所述摄像头帧率大于30fps,同时具有光学防抖、背景补偿功能;所述摄像头的放置位置为向下与水平面夹角为15
°
,其拍摄水平分辨率大于500线。
18.优选地,所述无线通信装置是通过ofdm或大功率wifi进行数据传输;
19.所述航拍摄像头分辨率大于1920*1080;
20.所述无人机在搭载所述航拍摄像头且传输视频数据的情况下保持大于45分钟的续航;每个路口应配备4台无人机交替使用,同一时间点仅有一台无人机用于采集视频画面,其余无人机处于待命或者充电状态。
21.优选地,控制所述红绿灯切换的时间间隔的具体步骤如下:
22.步骤一、云平台检测控制系统根据采集的路口处或者目标道路上的车辆和行人视频数据,来检测目标路段红灯向绿灯切换时东西和南北方向的车辆总数和行人总数;
23.步骤二、根据所述东西和南北方向的车辆总数和行人总数分别计算东西和南北方向上的路段通行压力;
24.步骤三、根据所述东西和南北方向上的路段通行压力分别计算东西和南北方向的绿灯持续时间;
25.步骤四、设定黄灯持续时间,并根据所述东西和南北方向的绿灯持续时间,计算得到东西和南北方向红灯持续时间。
26.与现有技术相比,本发明的有益效果在于:
27.本发明通过使用位于路口处的近场摄像头及无人机航拍数据检测该路段车辆及行人数量,根据一定策略设置红绿灯切换时间间隔,提高了路口处的通行效率,实现智能化交通信号灯的控制。
附图说明
28.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
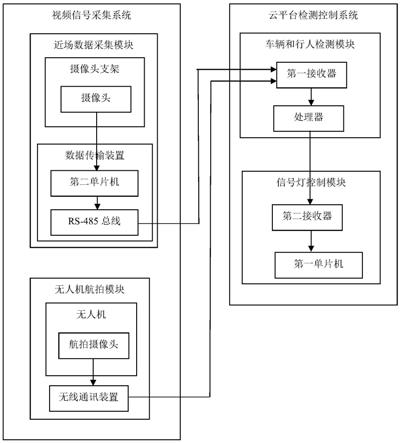
29.图1为本发明的系统结构图;
30.图2为本发明控制系统的控制流程图;
31.图3为本发明车辆及行人视频数据检测流程图;
32.图4为本发明红绿灯切换时间间隔流程图。
具体实施方式
33.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
34.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
35.实施例1
36.参照图2所示,本发明在路口处设置摄像头采集近场数据,同时在早晚高峰时期利用无人机航拍采集该路段的俯视数据,通过多视角学习算法训练yolov4检测模型,检测该路段车辆及行人的数量,并按照一定逻辑自动控制红绿灯切换时间。
37.参照图1所示,本发明提出一种基于视觉分析的交通信号灯控制系统,包括:视频信号采集系统和云平台检测控制系统;所述视频信号采集系统,用于采集路口处或者目标道路上的车辆和行人视频数据,并上传至云平台检测控制系统;所述云平台检测控制系统,用于对采集的车辆和行人视频数据进行检测,并根据检测的结果控制红绿灯切换的时间间隔。
38.所述视频信号采集系统,包括:无人机航拍模块和近场数据采集模块;所述无人机航拍模块,用于采集非高峰时期路口处的车辆和行人视频数据,并将采集的视频数据上传至所述云平台检测控制系统;所述近场数据采集模块,用于采集早晚高峰时期目标道路上的车辆和行人视频数据,并将采集的视频数据上传至所述云平台检测控制系统。
39.所述近场数据采集模块,包括:摄像头、摄像头支架,数据传输装置;所述摄像头支架用于将所述摄像头固定于路口处红绿信号灯旁,摄像头向下与水平面夹角为15
°
,以尽可能多的采集视频画面,提高检测效果。摄像头用于拍摄近场图像,应可拍摄水平分辨率500线以上的图像;帧率大于30fps,同时,摄像头应具有强光抑制、背光补偿等功能。所述摄像头用于采集非高峰时期路口处的车辆和行人视频数据;所述数据传输装置用于将所述摄像
头采集的视频数据上传至所述云平台检测控制系统。其中,所述数据传输装置是通过rs
‑
485进行有线传输,包括:第二单片机和rs
‑
485总线;所述第二单片机用于对采集的非高峰时期路口处的车辆和行人视频数据进行变换,使其符合rs
‑
485协议,并通过数据线进行数据传输。
40.所述无人机航拍模块,包括:无人机、航拍摄像头,无线通信装置;所述无人机用于搭载所述航拍摄像头;所述航拍摄像头用于采集早晚高峰时期的目标道路上的俯视车辆及行人视频信息;所述无线通信装置用于将所述航拍摄像头采集到的视频数据上传至所述云平台检测控制系统。其中,所述无线通信装置是通过ofdm或大功率wifi进行数据传输;所述航拍摄像头分辨率大于1920*1080;所述无人机在搭载远场摄像头且传输视频数据的情况下保持45分钟以上的续航,各大城市早晚高峰一般持续2小时左右,每个路口应配备4台无人机交替使用,同一时间点仅有一台无人机用于采集视频画面,其余无人机处于待命或者充电状态,以满足在早晚高峰时可保证始终有无人机处于工作状态。
41.所述云平台检测控制系统,包括:车辆及行人检测模块、信号灯控制模块;所述车辆及行人检测模块,用于接收所述视频信号采集系统采集的车辆和行人视频数据,并检测出当前的车流量和人流量信息传输给所述信号灯控制模块;所述信号灯控制模块,用于接收当前车流量和人流量信息,并根据接受的信息设定红绿灯切换时间间隔和控制红绿灯的状态。在非高峰时期,由于车辆拥堵并不严重,仅有近场摄像头采集数据,并进行车辆及行人数量检测。在早晚高峰时期,同时利用近场摄像头及无人机航拍摄像头采集到的数据进行检测,根据检测出的车辆及行人数量信息控制红绿切换的时间间隔。
42.所述红绿灯切换时间间隔的具体步骤如下,参照图4所示:
43.步骤一、云平台通过视频数据检测该目标路段红灯向绿灯切换时东西方向车辆总数为v1,行人总数为p1,南北方向东西方向车辆总数为v2,行人总数为p2。
44.步骤二、根据各个方向上等待的车辆及行人数量计算该目标路段的通行压力w,公式为:
[0045][0046]
步骤三、根据上述公式计算东西方向拥挤程度w1及南北方向通行压力w2,计算出东西方向绿灯持续时间t1及南北方向绿灯持续时间t2,公式为:
[0047][0048][0049]
其中,t0为基准绿灯持续时间,一般取t0∈[30,60]。
[0050]
步骤四、绿灯向红灯切换时黄灯持续时间为y秒,一般取y∈[3,10],则东西方向及南北方向红灯持续时间r
i
=t
i
+y,i=1,2(秒)。
[0051]
所述云平台检测控制系统,应根据时间段分为早晚高峰模式及非高峰模式,其中早晚高峰时间段为每天7:00
‑
9:00及16:00
‑
18:00,其余时间为非高峰时间。处于早晚高峰
模式时,云平台检测控制系统同时利用近场数据和无人机航拍数据进行多视角学习、协同训练,用于检测高峰时期车辆及行人数量;处于非高峰时期时,利用摄像头近场数据进行训练,以检测非高峰时期车辆及行人数量。
[0052]
所述车辆及行人检测模块,包括:第一接受器和处理器;所述第一接收器,用于接收路口处或者目标道路上的车辆和行人视频数据,并传输给所述处理器;所述处理器,用于对路口处或者目标道路上的车辆和行人视频数据进行检测,检测出当前的车流量和人流量信息,并传输给所述信号灯控制模块;
[0053]
所述处理器采用yolov4算法对车辆及行人视频数据进行检测,参照图3所示,首先采集多个路口处的近场数据与无人机航拍数据,并使用voc格式对数据进行标注,训练yolov4模型,实现对路口处的车辆及行人进行检测,并利用计数器计算视场范围内的车辆及行人计数。并根据检测结果按照一定逻辑自动调节红绿灯切换时间间隔。然后通过yolohead对获取到的特征进行预测。其中,yolov4提取对多特征层进行目标检测,一共提取三个特征层,分别位于中间层,中下层和底层,三个特征层的分别是76*76*256、38*38*512以及19*19*1025,通过三个特征层的预测结果在图像上绘制出分别为19x19、38x38、76x76的网格上3个预测框的位置。
[0054]
所述信号灯控制模块,包括:第二接收器和第一单片机;所述接收器,用与接收当前的车流量和人流量信息并传输给所述单片机;所述第一单片机,用于根据当前的车流量和人流量信息按照一定逻辑设定红绿灯切换的时间间隔,并通过电信号控制红绿灯的状态。
[0055]
以上所述的实施例仅是对本发明的优选方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1