不良天气影响高速公路最大容许速度研判方法与系统与流程
1.本发明属于交通工程技术领域,具体涉及一种不良天气影响高速公路最大容许速度研判方法与系统。本系统根据限速区道路线形、结构物分步以及交通气象变化等,对限速区的最大容许速度进行研判。
背景技术:
2.在恶劣天气条件下,最大容许速度与道路、车辆、驾驶员以及环境等都有着密切的联系。在考虑安全行驶速度时,应该考虑其对公路线形、行车环境以及道路状态等方面的适应性。在研究恶劣天气条件下的安全行驶速度时,一方面需要考虑车辆在减速过程中的安全停车视距要求,以及在互通立交、服务区等区域的决策视距要求,另一方面还需要考虑制动、转弯过程中车辆的行驶稳定性的要求。
3.一个限速段内,可能存在多个路段恶劣天气类型、影响程度都不同的情况。在分析路段内的最大容许速度时,应取路段内最不利情况进行分析,或对比多个段落的最大容许速度,取最小值作为路段的最大容许速度。
4.目前,针对对于高速公路的实时速度控制或可变限速等技术已有相关研究,包括针对不同天气条件、道路条件、交通条件、养护作业区等情况下的可变限速控制方法与系统。现有的一些针对恶劣天气的路段限速方法中,有的仅考虑了停车视距对路段中的速度的影响,并未综合对道路线形、结构物、天气等因素对整个限速区的综合影响。因此如何克服现有技术的不足是目前交通工程技术领域亟需解决的问题。
技术实现要素:
5.本发明的目的是为了解决现有技术的不足,提供一种不良天气影响高速公路最大容许速度研判方法与系统。
6.为实现上述目的,本发明采用的技术方案如下:
7.不良天气影响高速公路最大容许速度研判方法,包括如下步骤:
8.步骤(1),基于道路线形指标的容许速度计算:通过1km路段范围内的最小半径r、最小半径所在处的路面横向坡度、最小竖曲线长度,及其所在处的纵坡坡度代数差,从v(c1)=120km/h开始验算,需为同时满足下列关系式(1)~(3),验算不满足其一时,v(c1)=v(c1)-10km/h,继续验算,直至所有关系是都满足为止;
[0009][0010][0011][0012]
其中,v(c1)为基于道路线形指标的容许速度,km/h;r为1km路段内曲线半径最小
值,m;μ为横向力系数;i为曲线对应的路面横向坡度,%;l
v1
为路段内最小竖曲线长度,m;δ为纵坡坡度代数差,%;b为车道宽度,m;
[0013]
步骤(2),交通气象分析启动:若路段内有交通气象监测,且a)至e)条件满足至少一条时,则进行下一步;
[0014]
a)能见度小于500m;
[0015]
b)降水强度大于等于0.7mm/分钟;
[0016]
c)路面状态不为干燥状态;
[0017]
d)水膜厚度大于0.1mm;
[0018]
e)风速大于20km/h;
[0019]
步骤(3),停车视距容许速度分析:根据能见度、降水强度、路面状态,从v(ssd)=v(c1)开始验算是否满足下式(4),若是,v(ssd)=v(ssd),若否,v(ssd)=v(ssd)-10km/h,继续验算;
[0020][0021]s′
=θ
·
(s-s
safe
)
ꢀꢀ
(5)
[0022]
θ=-0.0034v(ssd)+1.0452
ꢀꢀ
(6)
[0023]
s=visib=visib
mor
×
(1+σ)
ꢀꢀ
(7)
[0024][0025]
其中,v(ssd)为考虑停车视距的容许速度,千米/小时;s为停车视距,米;visib为人工观测能见度,米;visib
mor
为交通气象观测站能见度传感器自动观测值,米;σ为人工观测较自动观测距离提高的比例;θ为动视力调整值,s
safe
为安全距离,米;tr为反应时间,秒;precipitation为每分钟降水量,毫米/分钟;为基准反应时间,秒;δτ为恶劣天气影响下的反应时间增加值,秒;f为纵向磨阻系数;
[0026]
步骤(4),决策视距容许速度分析模块:
[0027]
当路段有互通立交、服务区、停车区、收费站时,根据能见度、降水强度,从v(dsd)=v(ssd)开始研判是否满足下式,若是,v(dsd)=v(dsd),若否,v(ssd)=v(ssd)-10km/h,继续验算。
[0028][0029]
d=min(visib,s
立交
)
[0030]
其中,v(dsd)为决策视距容许速度;td为标志在视线范围内出现到采取制动或换道行为之间的时间,s;d为能通视的距离,米;visib为能见度,米;s
立交
为立交出口、服务区、停车区、收费站的实际可通视距离,米;
[0031]
当路段不存在互通立交、服务区、停车区、收费站时,v(dsd)=v(ssd);
[0032]
步骤(5),水滑容许速度分析:根据水膜厚度,从v(hs)=v(dsd)开始验算,判斯水膜厚度是否小于v(hs)对应的水膜厚度取值范围的上限值,若是,v(hs)=v(hs),若否,v(hs)=v(hs)-10km/h,继续验算;其中,v(hs)为水滑容许速度,km/h;v(hs)对应的水膜厚度取值范围如表1所示;
[0033]
表1
[0034][0035][0036]
步骤(6),行驶稳定性容许速度分析:根据路面状态、能见度、风速,从v(st)=v(hs))开始验算;其中,v(st)为行驶稳定性容许速度;判断在当前路面状态下,路段最小半径和能见度是否满足表2中第2列速度按照v(st)取值时对应半径和能见度的要求,若满足表2的要求,则v(st)=v(st),若不满足表2的要求,则v(st)=v(st)-10km/h,继续验算;
[0037]
最终,当侧风风力小于50km/h时,该路段最大容许速度当侧风风力大于等于50km/h且小于100km/h时,当侧风风力大于等于100km/h时,
[0038]
表2
[0039][0040][0041]
进一步,优选的是,步骤(2)中,若路段内有交通气象监测,且a)至e)条件均不满足时,最大容许速度
[0042]
进一步,优选的是,步骤(2)中,若路段内无交通气象监测的,最大容许速度
[0043]
进一步,优选的是,能见度、降水强度、路面状态、水膜厚度、风速均从交通气象监测站中采集获得。
[0044]
进一步,优选的是,步骤(3)中,σ取20%~30%,s
safe
取0.5-1m,取2.5s;
[0045]
[0046]
其中,f
标准
为《公路工程技术标准》中的条文说明表7.5取值;为纵向摩阻系数折减|系数,路面状态为积水、冰水混合时,等于干燥路面条件的摩擦系数与当前路面状态下的摩擦系数的比值。
[0047]
进一步,优选的是,步骤(4)中,td取值范围为10.2s-14.5s。
[0048]
本发明同时提供一种不良天气影响高速公路最大容许速度研判方系统,采用上述不良天气影响高速公路最大容许速度研判方法,其特征在于,包括:
[0049]
交通气象监测站,用于采集交通气象数据,所述的交通气象包括能见度、降水强度、路面状态、水膜厚度、风速;
[0050]
基于道路线形指标的容许速度计算器,用于通过1km路段范围内的最小半径r、最小半径所在处的路面横向坡度、最小竖曲线长度,及其所在处的纵坡坡度代数差,计算基于道路线形指标的容许速度;
[0051]
交通气象分析启动模块,用于对交通气象进行分析,判断是否启动停车视距容许速度分析模块,若不启动,则基于道路线形指标的容许速度为该路段最大容许速度;
[0052]
停车视距容许速度分析模块,用于根据能见度、降水强度、路面状态,分析计算停车视距容许速度;
[0053]
决策视距容许速度分析模块,用于根据能见度、降水强度,分析计算视距容许速度;
[0054]
水滑容许速度分析模块,用于根据水膜厚度,分析计算水滑容许速度;
[0055]
行驶稳定性容许速度分析模块,用于根据路面状态、能见度、风速,分析计算行驶稳定性容许速度,作为该路段最大容许速度。
[0056]
进一步,优选的是,还包括显示模块,用于显示该路段最大容许速度。
[0057]
进一步,优选的是,显示模块显示该路段最大容许速度时,还显示其对应颜色,如表3所示;
[0058]
表3
[0059]
颜色该路段最大容许速度(km/h)蓝色120绿色110,100黄色90,80橙色70,60红色50,40紫色30,20灰色<20km/h。
[0060]
本发明考虑,首先在一个限速区内,可能同时存在恶劣天气影响路段、线形困难路段、隧道路段等,应根据整个限速区的特征,对比多个特征路段以选取适应于整个限速区道路、气象等特征的最大容许速度;另外恶劣天气除了影响视距,还会对车辆稳定性等产生影响,不能单一的仅考虑停车视距或稳定性等作为限速区可变限速值的制定依据。通过分析可以看出,速度对安全的影响因素复杂多样,且彼此之间也存在相互的制约和影响。
[0061]
在停车视距的模型中,各参数的取值与能见度、道路坡度、路面摩擦系数等均有相
关性。然而在实际的恶劣天气下的行驶过程中,事故的发生形态多样。有制动不及时的追尾事故,也有侧滑事故、侧翻事故等。因此,在车辆在道路中行驶,不仅需要考虑制动距离等,还需要对车辆行驶的稳定性等进行分析。所以,需要综合道路、交通气象等信息确定最大容许速度及路段限速值。
[0062]
本发明基于能见度、路面状态、降雨强度、水膜厚度、风速、路面湿滑系数等交通气象数据,综合考虑停车视距、决策视距(互通立交和服务区路段)、水滑速度和车辆行驶稳定性对速度的影响,提出恶劣天气下最大容许速度综合决策方法。
[0063]
本发明与现有技术相比,其有益效果为:
[0064]
本发明针对恶劣天气下公路追尾、侧滑、侧翻事故等特点,通过利用能见度、路面状态、降雨强度、水膜厚度、风速、路面湿滑系数等交通气象数据,综合考虑停车视距、决策视距(互通立交和服务区路段)、水滑速度和车辆行驶稳定性对速度的影响等提出不良天气影响高速公路最大容许速度研判方法与系统。本发明是直接运用交通气象站观测的数据进行计算得到最大容许速度的方法,且最大容许速度的研判涵盖了影响速度的多项交通气象观测因素,结果能够反应多类恶劣天气下安全风险下的速度要求。且本发明通过从120km/h开始验算,并在不满足条件时按照当前速度减去10km/h折减后反馈验算的方式得到最大容许速度的方法,能够简化由于容许速度计算模型中存在与速度相关参数会影响计算公式的计算结果和复杂程度等问题,本发明所采用的的方法能够快速地得到满足速度控制要求的最大容许速度值。
[0065]
本发明能够为公路提供科学合理速度控制依据,在一定程度上降低管理成本,提高公路安全保障能力。同时本发明是交通气象数据结合公路管理运营等的应用价值具体体现,能够充分发挥交通气象监测数据对运营管理的作用。
附图说明
[0066]
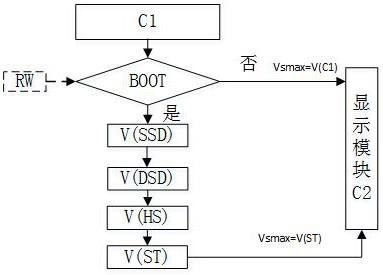
图1为不良天气影响高速公路最大容许速度研判系统的结构示意图;
[0067]
其中,rw为交通气象监测站;c1为基于道路线形指标的容许速度计算器;boot为交通气象分析启动模块;v(ssd)为停车视距容许速度分析模块;v(dsd)为决策视距容许速度分析模块;v(hs)为水滑容许速度分析模块;v(st)为行驶稳定性容许速度分析模块;c2为显示模块。
具体实施方式
[0068]
下面结合实施例对本发明作进一步的详细描述。
[0069]
本领域技术人员将会理解,下列实施例仅用于说明本发明,而不应视为限定本发明的范围。实施例中未注明具体技术或条件者,按照本领域内的文献所描述的技术或条件或者按照产品说明书进行。所用材料或设备未注明生产厂商者,均为可以通过购买获得的常规产品。
[0070]
本技术领域技术人员可以理解,除非特意声明,这里使用的单数形式“一”、“一个”、“所述”和“该”也可包括复数形式。应该进一步理解的是,本发明的说明书中使用的措辞“包括”是指存在所述特征、整数、步骤、操作、元件和/或组件,但是并不排除存在或添加一个或多个其他特征、整数、步骤、操作、元件、组件和/或它们的组。应该理解,当我们称元
件被“连接”到另一元件时,它可以直接连接到其他元件,或者也可以存在中间元件。此外,这里使用的“连接”可以包括无线连接。这里使用的措辞“和/或”包括一个或更多个相关联的列出项的任一单元和全部组合。
[0071]
在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。术语“内”、“上”、“下”等指示的方位或状态关系为基于附图所示的方位或状态关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0072]
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“连接”、“设有”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,根据具体情况理解上述术语在本发明中的具体含义。
[0073]
本技术领域技术人员可以理解,除非另外定义,这里使用的所有术语(包括技术术语和科学术语)具有与本发明所属领域中的普通技术人员的一般理解相同的意义。还应该理解的是,诸如通用字典中定义的那些术语应该被理解为具有与现有技术的上下文中的意义一致的意义,并且除非像这里一样定义,不会用理想化或过于正式的含义来解释。
[0074]
实施例1
[0075]
不良天气影响高速公路最大容许速度研判方法,包括如下步骤:
[0076]
步骤(1),基于道路线形指标的容许速度计算:通过1km路段范围内的最小半径r、最小半径所在处的路面横向坡度、最小竖曲线长度,及其所在处的纵坡坡度代数差,从v(c1)=120km/h开始验算,需为同时满足下列关系式(1)~(3),验算不满足其一时,v(c1)=v(c1)-10km/h,继续验算,直至所有关系是都满足为止;
[0077][0078][0079][0080]
其中,v(c1)为基于道路线形指标的容许速度,km/h;r为1km路段内曲线半径最小值,m;μ为横向力系数;i为曲线对应的路面横向坡度,%;l
v1
为路段内最小竖曲线长度,m;δ为纵坡坡度代数差,%;b为车道宽度,m;
[0081]
步骤(2),交通气象分析启动:若路段内有交通气象监测,且a)至e)条件满足至少一条时,则进行下一步;
[0082]
a)能见度小于500m;
[0083]
b)降水强度大于等于0.7mm/分钟;
[0084]
c)路面状态不为干燥状态;
[0085]
d)水膜厚度大于0.1mm;
[0086]
e)风速大于20km/h;
[0087]
步骤(3),停车视距容许速度分析:根据能见度、降水强度、路面状态,从v(ssd)=v(c1)开始验算是否满足下式(4),若是,v(ssd)=v(ssd),若否,v(ssd)=v(ssd)-10km/h,继
续验算;
[0088][0089]s′
=θ
·
(s-s
safe
)
ꢀꢀ
(5)
[0090]
θ=-0.0034v(ssd)+1.0452
ꢀꢀ
(6)
[0091]
s=visib=visib
mor
×
(1+σ)
ꢀꢀ
(7)
[0092][0093]
其中,v(ssd)为考虑停车视距的容许速度,千米/小时;s为停车视距,米;visib为人工观测能见度,米;visib
mor
为交通气象观测站能见度传感器自动观测值,米;σ为人工观测较自动观测距离提高的比例;θ为动视力调整值,s
safe
为安全距离,米;tr为反应时间,秒;precipitation为每分钟降水量,毫米/分钟;为基准反应时间,秒;δτ为恶劣天气影响下的反应时间增加值,秒;f为纵向磨阻系数;
[0094]
步骤(4),决策视距容许速度分析模块:
[0095]
当路段有互通立交、服务区、停车区、收费站时,根据能见度、降水强度,从v(dsd)=v(ssd)开始研判是否满足下式,若是,v(dsd)=v(dsd),若否,v(ssd)=v(ssd)-10km/h,继续验算。
[0096][0097]
d=min(visib,s
立交
)
[0098]
其中,v(dsd)为决策视距容许速度;td为标志在视线范围内出现到采取制动或换道行为之间的时间,s;d为能通视的距离,米;visib为能见度,米;s
立交
为立交出口、服务区、停车区、收费站的实际可通视距离,米;
[0099]
当路段不存在互通立交、服务区、停车区、收费站时,v(dsd)=v(ssd);
[0100]
步骤(5),水滑容许速度分析:根据水膜厚度,从v(hs)=v(dsd)开始验算,判断水膜厚度是否小于v(hs)对应的水膜厚度取值范围的上限值,若是,v(hs)=v(hs),若否,v(hs)=v(hs)-10km/h,继续验算;其中,v(hs)为水滑容许速度,km/h;v(hs)对应的水膜厚度取值范围如表1所示;
[0101]
步骤(6),行驶稳定性容许速度分析:根据路面状态、能见度、风速,从v(st)=v(hs))开始验算;其中,v(st)为行驶稳定性容许速度;判断在当前路面状态下,路段最小半径和能见度是否满足表2中第2列速度按照v(st)取值时对应半径和能见度的要求,若满足表2的要求,则v(st)=v(st),若不满足表2的要求,则v(st)=v(st)-10km/h,继续验算;
[0102]
最终,当侧风风力小于50km/h时,该路段最大容许速度当侧风风力大于等于50km/h且小于100km/h时,当侧风风力大于等于100km/h时,
[0103]
实施例2
[0104]
不良天气影响高速公路最大容许速度研判方法,包括如下步骤:
[0105]
步骤(1),基于道路线形指标的容许速度计算:通过1km路段范围内的最小半径r、
最小半径所在处的路面横向坡度、最小竖曲线长度,及其所在处的纵坡坡度代数差,从v(c1)=120km/h开始验算,需为同时满足下列关系式(1)~(3),验算不满足其一时,v(c1)=v(c1)-10km/h,继续验算,直至所有关系是都满足为止;
[0106][0107][0108][0109]
其中,v(c1)为基于道路线形指标的容许速度,km/h;r为1km路段内曲线半径最小值,m;μ为横向力系数;i为曲线对应的路面横向坡度,%;l
v1
为路段内最小竖曲线长度,m;δ为纵坡坡度代数差,%;b为车道宽度,m;
[0110]
步骤(2),交通气象分析启动:若路段内有交通气象监测,且a)至e)条件满足至少一条时,则进行下一步;
[0111]
a)能见度小于500m;
[0112]
b)降水强度大于等于0.7mm/分钟;
[0113]
c)路面状态不为干燥状态;
[0114]
d)水膜厚度大于0.1mm;
[0115]
e)风速大于20km/h;
[0116]
步骤(3),停车视距容许速度分析:根据能见度、降水强度、路面状态,从v(ssd)=v(c1)开始验算是否满足下式(4),若是,v(ssd)=v(ssd),若否,v(ssd)=v(ssd)-10km/h,继续验算;
[0117][0118]s′
=θ
·
(s-s
safe
)
ꢀꢀ
(5)
[0119]
θ=-0.0034v(ssd)+1.0452
ꢀꢀ
(6)
[0120]
s=visib=visib
mor
×
(1+σ)
ꢀꢀ
(7)
[0121][0122]
其中,v(ssd)为考虑停车视距的容许速度,千米/小时;s为停车视距,米;visib为人工观测能见度,米;visib
mor
为交通气象观测站能见度传感器自动观测值,米;σ为人工观测较自动观测距离提高的比例;θ为动视力调整值,s
safe
为安全距离,米;tr为反应时间,秒;precipitation为每分钟降水量,毫米/分钟;为基准反应时间,秒;δτ为恶劣天气影响下的反应时间增加值,秒;f为纵向磨阻系数;
[0123]
步骤(4),决策视距容许速度分析模块:
[0124]
当路段有互通立交、服务区、停车区、收费站时,根据能见度、降水强度,从v(dsd)=v(ssd)开始研判是否满足下式,若是,v(dsd)=v(dsd),若否,v(ssd)=v(ssd)-10km/h,继续验算。
[0125][0126]
d=min(visib,s
立交
)
[0127]
其中,v(dsd)为决策视距容许速度;td为标志在视线范围内出现到采取制动或换道行为之间的时间,s;d为能通视的距离,米;visib为能见度,米;s
立交
为立交出口、服务区、停车区、收费站的实际可通视距离,米;
[0128]
当路段不存在互通立交、服务区、停车区、收费站时,v(dsd)=v(ssd);
[0129]
步骤(5),水滑容许速度分析:根据水膜厚度,从v(hs)=v(dsd)开始验算,判断水膜厚度是否小于v(hs)对应的水膜厚度取值范围的上限值,若是,v(hs)=v(hs),若否,v(hs)=v(hs)-10km/h,继续验算;其中,v(hs)为水滑容许速度,km/h;v(hs)对应的水膜厚度取值范围如表1所示;
[0130]
步骤(6),行驶稳定性容许速度分析:根据路面状态、能见度、风速,从v(st)=v(hs))开始验算;其中,v(st)为行驶稳定性容许速度;判断在当前路面状态下,路段最小半径和能见度是否满足表2中第2列速度按照v(st)取值时对应半径和能见度的要求,若满足表2的要求,则v(st)=v(st),若不满足表2的要求,则v(st)=v(st)-10km/h,继续验算;
[0131]
最终,当侧风风力小于50km/h时,该路段最大容许速度当侧风风力大于等于50km/h且小于100km/h时,当侧风风力大于等于100km/h时,
[0132]
步骤(2)中,若路段内有交通气象监测,且a)至e)条件均不满足时,最大容许速度
[0133]
步骤(2)中,若路段内无交通气象监测的,最大容许速度
[0134]
能见度、降水强度、路面状态、水膜厚度、风速均从交通气象监测站中采集获得。
[0135]
步骤(3)中,σ取20%~30%,s
safe
取0.5-1m,取2.5s;
[0136][0137]
其中,f
标准
为《公路工程技术标准》中的条文说明表7.5取值;为纵向摩阻系数折减系数,路面状态为积水、冰水混合时,等于干燥路面条件的摩擦系数与当前路面状态下的摩擦系数的比值。
[0138]
步骤(4)中,td取值范围为10.2s-14.5s。
[0139]
实施例3
[0140]
如图1所示,一种不良天气影响高速公路最大容许速度研判方系统,采用实施例1不良天气影响高速公路最大容许速度研判方法,包括:
[0141]
交通气象监测站rw,用于采集交通气象数据,所述的交通气象包括能见度、降水强度、路面状态、水膜厚度、风速;
[0142]
基于道路线形指标的容许速度计算器c1,用于通过1km路段范围内的最小半径r、最小半径所在处的路面横向坡度、最小竖曲线长度,及其所在处的纵坡坡度代数差,计算基于道路线形指标的容许速度;
[0143]
交通气象分析启动模块boot,用于对交通气象进行分析,判断是否启动停车视距容许速度分析模块,若不启动,则基于道路线形指标的容许速度为该路段最大容许速度;
[0144]
停车视距容许速度分析模块v(ssd),用于根据能见度、降水强度、路面状态,分析计算停车视距容许速度;
[0145]
决策视距容许速度分析模块v(dsd),用于根据能见度、降水强度,分析计算视距容许速度;
[0146]
水滑容许速度分析模块v(hs),用于根据水膜厚度,分析计算水滑容许速度;
[0147]
行驶稳定性容许速度分析模块v(st),用于根据路面状态、能见度、风速,分析计算行驶稳定性容许速度,作为该路段最大容许速度。
[0148]
实施例4
[0149]
如图1所示,一种不良天气影响高速公路最大容许速度研判方系统,采用实施例1不良天气影响高速公路最大容许速度研判方法,包括:
[0150]
交通气象监测站rw,用于采集交通气象数据,所述的交通气象包括能见度、降水强度、路面状态、水膜厚度、风速;
[0151]
基于道路线形指标的容许速度计算器c1,用于通过1km路段范围内的最小半径r、最小半径所在处的路面横向坡度、最小竖曲线长度,及其所在处的纵坡坡度代数差,计算基于道路线形指标的容许速度;
[0152]
交通气象分析启动模块boot,用于对交通气象进行分析,判断是否启动停车视距容许速度分析模块,若不启动,则基于道路线形指标的容许速度为该路段最大容许速度;
[0153]
停车视距容许速度分析模块v(ssd),用于根据能见度、降水强度、路面状态,分析计算停车视距容许速度;
[0154]
决策视距容许速度分析模块v(dsd),用于根据能见度、降水强度,分析计算视距容许速度;
[0155]
水滑容许速度分析模块v(hs),用于根据水膜厚度,分析计算水滑容许速度;
[0156]
行驶稳定性容许速度分析模块v(st),用于根据路面状态、能见度、风速,分析计算行驶稳定性容许速度,作为该路段最大容许速度。
[0157]
还包括显示模块c2,用于显示该路段最大容许速度。显示模块c2显示该路段最大容许速度时,还显示其对应颜色,如表3所示;
[0158]
实施例5
[0159]
一个限速段内,可能存在多个路段恶劣天气类型、影响程度都不同的情况。在分析路段内的最大容许速度时,应取路段内最不利情况进行分析,或对比多个段落的最大容许速度,取最小值作为路段的最大容许速度。
[0160]
1、不良天气影响高速公路最大容许速度确定方法和系统包括基于道路线形的容许速度计算模块c1、启动条件模块boot、停车视距容许速度分析模块v(ssd)、决策视距容许速度分析模块v(dsd)、水滑现象容许速度分析模块v(hp)、行驶稳定性分析模块v(st)、最大容许速度显示模块c2。
[0161]
最大容许速度显示模块c2显示路段最大容许速度值、通过颜色和数字表示路段的最大容许速度。
[0162]
2、基于道路线形指标的容许速度计算器c1:
[0163]
通过1km路段范围内的最小半径r、及最小半径所在处的路面横坡,最小竖曲线长度,及其所在处的纵坡代数差,从v(c1)=120km/h开始验算,需为同时满足下列关系式,验算不满足其一时,v(c1)=v(c1)-10km/h,继续验算,直至所有关系是都满足为止。
[0164][0165][0166][0167]
其中,v(c1)为基于道路线形指标的容许速度,km/h;r为1km路段内曲线半径最小值,m;μ为横向力系数(取值参照《公路工程技术标准》);i为曲线对应的路面横向坡度,%;l
v1
为路段内最小竖曲线长度,m;δ为纵坡坡度代数差,%;b为车道宽度,m;
[0168]
3、交通气象分析启动模块boot:
[0169]
(1)当路段内有交通气象监测,且满足下列条件之一时,则进行下一步;
[0170]
a)能见度小于500m,
[0171]
b)降水强度大于等于0.7mm/分钟,
[0172]
c)路面状态不为干燥状态,
[0173]
d)水膜厚度大于0.1mm,
[0174]
e)风速大于20km/h,
[0175]
(2)路段内有交通气象监测,且上述a)至e)条件均不满足时,
[0176]
(3)路段内无交通气象监测的,
[0177]
4、停车视距容许速度分析模块v(ssd):当为3中第(1)中情况时,根据交通气象监测站rw中能见度、降水强度、路面状态,从v(ssd)=v(c1)开始研判是否满足下式,若是,v(ssd)=v(ssd),若否,v(ssd)=v(ssd)-10km/h,继续验算。
[0178][0179]
其中:v(ssd)为考虑停车视距的容许速度,s为停车视距(米),,visib为人工观测能见度(米),visib
mor
为交通气象观测站能见度传感器自动观测值(米),σ为人工观测较自动观测距离提高的比例,取20%~30%。θ为动视力调整值,s
safe
为安全距离(米),取0.5-1m。
[0180]s′
=θ
·
(s-s
safe
)
[0181]
θ=-0.0034v(ssd)+1.0452
[0182]
s=visib=visib
mor
×
(1+σ)
[0183]
tr为反应时间,由能见度,降雨强度确定。计算方法如下式。precipitation为每分钟降水量mm/min;为基准反应时间,根据《公路路线设计规范》取2.5s;δτ为恶劣天气影响下的反应时间增加值,取值见表4所示:
[0184]
表4
[0185][0186]
f为纵向磨阻系数,计算方法如下所示,
[0187][0188]
其中,f
标准
为《公路工程技术标准》中的条文说明表7.5取值;为纵向摩阻系数折减系数,路面状态为积水、冰水混合时,等于干燥路面条件的摩擦系数与当前路面状态下的摩擦系数的比值。
[0189]
5、视距容许速度分析模块v(dsd):当路段有互通立交、服务区、停车区、收费站时,根据交通气象监测站rw中能见度、降水强度,从v(dsd)=v(ssd)开始研判是否满足下式,若是,v(dsd)=v(dsd),若否,v(ssd)=v(ssd)-10km/h,继续验算。
[0190][0191]
d=min(visib,s
立交
)
[0192]
其中,v(dsd)为决策视距容许速度;td为标志在视线范围内出现到采取制动或换道行为之间的时间,s,取值依据交织区交通复杂程度取10.2s-14.5s;d为能通视的距离,米;visib为能见度,米;s
立交
为立交出口、服务区、停车区、收费站的实际可通视距离,米;
[0193]
当路段不存在互通立交、服务区、停车区、收费站时,v(dsd)=v(ssd)。
[0194]
6、水滑容许速度分析模块v(hs):根据交通气象监测站rw中水膜厚度,从v(hs)=v(dsd)开始验算,判断水膜厚度是否小于v(hs)对应表1的第2列水膜厚度取值范围的上限值,若是,v(hs)=v(hs),若否,v(hs)=v(hs)-10km/h,继续验算。
[0195]
7、行驶稳定性容许速度分析模块v(st):根据交通气象监测站rw中路面状态、能见度、风速,从v(st)=v(hs))开始验算;其中,v(st)为行驶稳定性容许速度;判断在当前路面状态下,路段最小半径和能见度是否满足表2中第2列速度按照v(st)取值时对应半径和能见度的要求,若满足表2的要求,则v(st)=v(st),若不满足表2的要求,则v(st)=v(st)-10km/h,继续验算;
[0196]
最终,当侧风风力小于50km/h时,该路段最大容许速度当侧风风力
大于等于50km/h且小于100km/h时,当侧风风力大于等于100km/h时,
[0197]
7、显示模块c2:根据3或6得到的最大容许速度显示在控制中心的显示器上,通过底色和数字方式表示路段最大容许速度。
[0198]
应用实例
[0199]
以云南山区某高速公路为例计算不良天气下的最大容许速度。在某1km的路段内,车道宽度为3.75m,路段最小半径为750m,该点对应横坡为4%,纵坡为1.2%,路段内最小竖曲线长度为210m,对应坡度差为4.2%。路段内有一处交通气象监测站,某时刻站点监测数据为能见度232m,降水强度0,路面状态潮湿,水膜厚度0.1mm,风速2m/s。
[0200]
(1)基于道路线形指标的容许速度分析中,初始化速度v(c1)=120km/h
[0201]
开始验算
[0202][0203]
条件不满足,故
[0204]
v(c1)=v(c1)-10=120-10=110km/h
[0205]
二次验算
[0206][0207][0208]
b=3.75,v(c1)>80km/h
[0209]
均满足要求,故v(c1)=110km/h。
[0210]
(2)交通气象分析启动模块boot,路段有交通气象监测,且能见度210m小于500m,故进行下一步;
[0211]
(3)停车视距容许速度分析:
[0212]
初始化设定v(ssd)=v(c1)=110km/h;
[0213]
首次验算:
[0214]
visib=s=232
×
(1+0.25)=290m
[0215]
θ=-0.0034
×
110+1.0452=0.6711
[0216]s′
=0.6711
·
(290-10)=194.75m
[0217]
tr=f(215,0)=2.5
[0218]
条件不满足,则
[0219]
v(ssd)=v(ssd)-10=110-10=100km/h;
[0220]
二次验算:
[0221]
[0222]
条件不满足,则
[0223]
v(ssd)=v(ssd)-10=100-10=90km/h;
[0224]
三次验算:
[0225][0226]
条件不满足,则
[0227]
v(ssd)=v(ssd)-10=90-10=80km/h;
[0228]
四次验算:
[0229][0230]
条件不满足,则
[0231]
v(ssd)=v(ssd)-10=80-10=70km/h;
[0232]
五次验算:
[0233][0234]
条件不满足,则
[0235]
v(ssd)=v(ssd)-10=70-10=60km/h;
[0236]
六次验算:
[0237][0238]
则v(ssd)=60km/h;
[0239]
(4)视距容许速度分析:当路段中存在一处停车区,
[0240]
初始化设定v(dsd)=v(ssd)=60km/h;
[0241]
首次验算
[0242][0243]
满足要求,故v(dsd)=60km/h。
[0244]
(5)水滑容许速度分析:
[0245]
初始化设定v(hs)=v(dsd)=60km/h
[0246]
v(hs)=60时,经查表1,对应水膜厚度取值范围为6.8≤h<8.3,实际水膜厚度为0.1mm<8.3mm。
[0247]
满足要求,故v(hs)=60km/h
[0248]
(6)行驶稳定性容许速度分析:
[0249]
初始化设定v(st)=v(hs)=60km/h;
[0250]
该地风速为2*3.6=7.2km/h<50km/h不需要修正。
[0251]
首次验算路面状态潮湿,且速度为60km/h,能见度应大于80m,半径大于250m,满足要求。故v(st)=60km/h,则
[0252]
(7)显示屏上该路段最大容许速度显示为60km/h,底色为橙色
[0253]
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1