一种高位枪球联动装置及使用方法与流程
1.本发明涉及停车管理技术领域,具体涉及一种高位枪球联动装置及使用方法。
背景技术:
2.随着经济和社会的发展,车辆保有量不断增加,而城市的停车位却增长不大,在拥挤的城市里,汽车与停车位之间的矛盾越来越突出,从而对停车位的管理效率提出了更高的要求。
3.现在很多停车位,尤其是路边停车位,一般都是通过人工管理,由于每个管理员只能在一个很小的范围内管理有限的停车位,管理效率低下,人工成本很高,而且管理员下班以后,无人继续管理停车位。另外,目前的智能化停车位管理,前期的安装陈本过高,同时需要进行布线操作,使得这种管理方式的现场硬件维护成本很高,限制了其普及和推广。
4.上述问题是本领域亟需解决的问题。
技术实现要素:
5.本发明要解决的技术问题是提供一种高位枪球联动装置及使用方法,从而使得车位停车事件判断更准确,计时更精确,违法停车行为抓拍取证更充分,同时省去布线烦恼,节约成本。
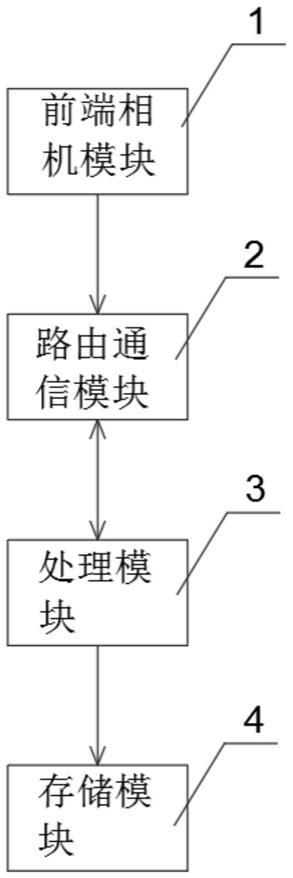
6.为了解决上述技术问题,本发明提供的方案是:一种高位枪球联动装置,包括前端相机模块、路由通信模块、处理模块和存储模块,所述前端相机模块与所述路由通信模块进行连接,所述路由通信模块与所述处理模块连接,所述处理模块与所述存储模块连接。
7.作为本发明的进一步改进,所述前端相机模块包括高清星光枪机和高清星光球机。
8.作为本发明的进一步改进,所述路由通信模块为4g路由器。
9.作为本发明的进一步改进,所述处理模块为工控机。
10.一种高位枪球联动装置的使用方法,包括以下步骤:
11.步骤一:所述高清星光枪机对每个车位划线并设置预置位,所述预置位分别设置有高清星光枪机和高清星光球机,同时对每个预置位和高清星光枪机以及高清星光球机画面进行标定;
12.步骤二:所述高清星光枪机采集监管管理车位和车位附近区域图像,所述处理模块通过停车场景专门训练的车辆检测器和跟踪算法对图像进行车辆行为分析,当车辆不存在驶入驶出行为时,则继续对图片进行车辆行为分析;
13.步骤三:当车辆存在驶入驶出行为时,并且抓拍车牌识别成功,则返回步骤二;
14.步骤四:当车辆存在驶入驶出行为时,并且没有抓拍车牌识别成功,则调用所述高清星光球机至最接近该车辆处,进行抓牌图片车牌识别;
15.步骤五:获取与抓拍车牌图片时间最相近的枪机图像,根据车辆在枪机图像中的位置,计算车辆在球机图像中对应的位置,对球机中该对应区域进行车牌识别,并将车牌识
别结果反馈步骤二中。
16.作为本发明的进一步改进,所述预置位覆盖2-3个车位及其周边区域。
17.本发明的有益效果:
18.本发明结构合理、简单,操作便捷,将前端相机模块、路由通信模块、处理模块和存储模块均安装在路灯杆上,前端相机模块对车位中的车辆状态进行拍摄,处理模块通过路由通信模块直接访问前端相机模块中的相机,进而获取拍摄的图片,并且对图片中车辆的行为进行分析,根据不同的分析结果控制前端相机模块作出相应的操作,最后将处理后的图片以及信息上传至存储模块中进行保存,进而方便用户进行操作。使得车位停车事件判断更准确,计时更精确,违法停车行为抓拍取证更充分。
附图说明
19.图1是本发明的结构示意图;
20.图2是本发明的流程示意图。
21.附图标记:1、前端相机模块;2、路由通信模块;3、处理模块;4、存储模块。
具体实施方式
22.下面结合附图和具体实施例对本发明作进一步说明,以使本领域的技术人员可以更好地理解本发明并能予以实施,但所举实施例不作为对本发明的限定。
23.参照图1所示,为本发明的一实施例,包括前端相机模块1、路由通信模块2、处理模块3和存储模块4,前端相机模块1与路由通信模块2进行连接,路由通信模块2与处理模块3连接,处理模块3与存储模块4连接。将前端相机模块1、路由通信模块2、处理模块3和存储模块4均安装在路灯杆上,前端相机模块1对车位中的车辆状态进行拍摄,处理模块3通过路由通信模块2直接访问前端相机模块1中的相机,进而获取拍摄的图片,并且对图片中车辆的行为进行分析,根据不同的分析结果控制前端相机模块1作出相应的操作,最后将处理后的图片以及信息上传至存储模块4中进行保存,进而方便用户进行操作。使得车位停车事件判断更准确,计时更精确,违法停车行为抓拍取证更充分。
24.本实施例中,将前端相机模块1包括设置有高清星光枪机和高清星光球机,能够提高夜间环境下车牌的清晰度,有效提高车牌识别的检测率和准确性。
25.本实施例中,将路由通信模块2设置为4g路由器,使得处理模块3能够通过4g网路访问前端相机模块1,提高操作的便捷性。
26.本实施例中,将处理模块3设置为高性能的工控机,通过工控机能够从前端相机模块1中获取图片并且对图片进行分析,之后根据分析的结果做出相应的措施。
27.实际使用过程,首先需要对前端相机模块1中的高清星光枪机和高清星光球机进行标定,在高清星光枪机画面中对每个车位划设对应的预置区域,每个预置区域覆盖2-3个车位及周边的区域,在完成预置位设置后,需要对每个预置位和高清星光枪机画面进行标定,以获取图像之间对应的转换关系;之后,处理模块3对高清星光枪机的图像进行车辆进行分析,使用针对用针对停车场景专门训练的车辆检测器和跟踪算法,实现车辆轨迹的精确分析,由车辆轨迹判断当前车辆是否正在发生驶入驶出车位行为,如满足上述条件,则认为当前车辆存在出库行为,如果出现高清星光枪机区域内车辆未抓拍该车牌,高清星光球
机则对该车辆进行驶入车牌抓牌;如果分析认为当前车辆存在出入库行为,且车牌也被抓拍成功,则继续返回并重复上述述步。获取与抓拍车牌图片时间最相近的高清星光枪机和高清星光球机图像,根据车辆在图像中的位置,计算车辆在高清星光球机图像中对应的位置,对高清星光球机中该对应区域进行车牌识别,并将车牌识别结果反馈上述步骤的车辆信息中。
28.本实施例的高位枪球联动装置的使用方法,包括以下步骤:
29.步骤一:所述高清星光枪机对每个车位划线并设置预置位,预置位分别设置有高清星光枪机和高清星光球机,同时对每个预置位和高清星光枪机以及高清星光球机画面进行标定;步骤二:高清星光枪机采集监管管理车位和车位附近区域图像,处理模块3通过停车场景专门训练的车辆检测器和跟踪算法对图像进行车辆行为分析,当车辆不存在驶入驶出行为时,则继续对图片进行车辆行为分析;步骤三:当车辆存在驶入驶出行为时,并且抓拍车牌识别成功,则返回步骤二;步骤四:当车辆存在驶入驶出行为时,并且没有抓拍车牌识别成功,则调用高清星光球机至最接近该车辆处,进行抓牌图片车牌识别;步骤五:获取与抓拍车牌图片时间最相近的枪机图像,根据车辆在枪机图像中的位置,计算车辆在球机图像中对应的位置,对球机中该对应区域进行车牌识别,并将车牌识别结果反馈步骤二中。
30.为了提高监控的范围,从而将预置位覆盖2-3个车位及其周边区域,从而在能够获取清晰图像的前提下,获得更大的监控范围。
31.以上所述实施例仅是为充分说明本发明而所举的较佳的实施例,本发明的保护范围不限于此。本技术领域的技术人员在本发明基础上所作的等同替代或变换,均在本发明的保护范围之内。本发明的保护范围以权利要求书为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1