一种交叉口机非冲突安全预警方法
1.本发明属于交通安全技术领域,具体为一种交叉口机非冲突安全预警方法。
背景技术:
2.城市道路信号交叉口交通环境复杂,机非混行严重,机非冲突问题尤为凸显,主要表现在机动车与自行车的交通冲突导致的通行能力下降、交通事故发生率上升等问题。
3.如何建立一个高效、准确、实时的交叉口机非冲突安全预警方法,方便交警部门合理安排交警出警时间和警力分配,是本发明的重点。
技术实现要素:
4.本发明的主要目的在于提供一种交叉口机非冲突安全预警方法,所述预警方法以交叉口机非流量等为关键特征,构建其与交叉口安全的相关性,得到交叉口机非冲突的实时监测系统,用于安全预警,方便交警部门合理安排警力。
5.本发明实现发明目的采用如下技术方案,首先,多方面考虑交叉口机非冲突主要影响因素,环境因素包括非机动车道宽度,是否有机非隔离设施,该交叉口规模;车辆因素包括非机动车和机动车的流量以及大型车辆的数量。其次,搭建基于模糊聚类分析和bp神经网络的机非冲突评估和预测模型并训练该模型。最后,将该训练好的模型存储在终端设备中,实时监测交叉口机非冲突并作出预警。本发明具体包括以下步骤:
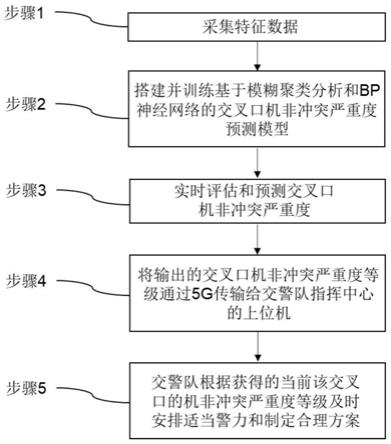
6.步骤1:采集数据。采集的特征数据包括环境因素,车辆因素和评判依据:单位时间内交叉口机非冲突次数,将冲突次数按照数量多少分为1-5共5个等级,分别代表交叉口机非冲突等级低、较低、一般、较高、高。
7.步骤2:搭建并训练基于模糊聚类分析和bp神经网络的交叉口机非冲突预测模型。具体如下:
8.(1)设采集到的交叉口机非冲突数据集为x={x1,x2...xn},n表示样本的数量,则该数据集可划分为c类,聚类中心集合为v={v1,v2...vc},每一个机非冲突数据均可以划分到相应的类别中,每一类有一个隶属度值u
ij
,它们构成一个隶属矩阵u=(u
ij
)c×n,模糊聚类的优化目标函数为
[0009][0010]
式中,m表示模糊系数;d
ij
表示样本xj与聚类中心vi之间的距离。
[0011]
(2)初始化权值和阈值。将步骤1中采集到的数据作为神经网络输入层,并进行归一化操作:
[0012][0013]
式中,max(x)表示同一指标所测数据的最大值,min(x)表示最小值。
[0014]
(3)设置输入层、隐藏层、输出层层数及节点。输入层为一层,将影响交叉口机非冲
突的每个因素作为一个输入层节点,则输入层节点数为n;输出层为一层,输出节点l为1,即城市典型交叉口机非冲突;隐藏层数根据实际情况而定,隐藏层节点数的设置则采用经验公式
[0015][0016]
α为3~10之间的常数。
[0017]
(4)训练神经网络。
[0018]
(5)评价神经网络。随机提取x组采集的数据代入神经网络,结合均方差计算损失,若阈值大于设定的阈值则返回步骤(3)重新构建模型。
[0019]
步骤3:实时评估和预测交叉口机非冲突。
[0020]
将步骤2中训练完成的基于模糊聚类分析和bp神经网络的交叉口机非冲突预测模型部署在智能路侧设备中。所述的智能路侧设备包括输入设备、存储器和处理器,将采集到的交叉口机非冲突数据输进输入设备,处理器调用存储器中存储的基于模糊聚类分析和bp神经网络的交叉口机非冲突预测模型程序,最终输出为当前该交叉口机非冲突等级。
[0021]
步骤4:智能路侧设备将输出的交叉口机非冲突等级通过5g传输给交警队指挥中心的上位机。
[0022]
步骤5:交警队根据获得的当前该交叉口的机非冲突等级及时安排适当警力和制定合理方案。
附图说明
[0023]
图1是交叉口机非冲突安全预警方法步骤图。
[0024]
图2是bp神经网络的结构图。
[0025]
图3是搭建基于模糊聚类分析和bp神经网络模型的流程图。
具体实施方式
[0026]
下面将结合附图和实施例,将本发明中的技术方案进行清楚、完整地描述:
[0027]
实施例:
[0028]
步骤1:采集数据。采集的特征数据共7个,包括环境因素即交叉口规模、非机动车道宽度以及该交叉口是否有机非隔离设施,车辆因素即以五分钟为单位,单位时间段内交叉口非机动车和机动车流量以及大型车辆的数量。采集的特征数据还包括评判依据:单位时间内交叉口机非冲突次数,将冲突次数按照数量多少分为1-5共5个等级,分别代表交叉口机非冲突等级低、较低、一般、较高、高。
[0029]
步骤2:搭建并训练基于模糊聚类分析和bp神经网络的交叉口机非冲突预测模型。具体如下:
[0030]
(1)设采集到的交叉口机非冲突数据集为x={x1,x2...xn},n表示样本的数量,则该数据集可划分为c类,聚类中心集合为v={v1,v2...vc},每一个机非冲突数据均可以划分到相应的类别中,每一类有一个隶属度值u
ij
,它们构成一个隶属矩阵u=(u
ij
)c×n,模糊聚类的优化目标函数为
[0031][0032]
式中,m表示模糊系数;d
ij
表示样本xj与聚类中心vi之间的距离。
[0033]
(2)初始化权值和阈值,阈值设为1。将步骤1中采集到的数据作为神经网络输入层,并进行归一化操作:
[0034][0035]
式中,max(x)表示同一指标所测数据的最大值,min(x)表示最小值。
[0036]
(3)设置输入层、隐藏层、输出层层数及节点。输入层为一层,将影响交叉口机非冲突的每个因素作为一个输入层节点,共有6个节点;输出层为一层,输出节点为1,即城市典型交叉口机非冲突;隐藏层为一层,隐藏层节点数的设置则采用经验公式
[0037][0038]
取α=5,则隐藏层节点数m为8。
[0039]
(4)训练神经网络。将网络模型训练误差设为0.008,最大迭代次数10000 次。
[0040]
(5)评价神经网络。随机提取50组采集的数据代入神经网络,结合均方差计算损失,若阈值大于1则返回步骤(3)重新构建模型。
[0041]
步骤3:实时评估和预测交叉口机非冲突。将步骤2中训练完成的基于模糊聚类分析和bp神经网络的交叉口机非冲突预测模型部署在智能路侧设备中。所述的智能路侧设备包括输入设备、存储器和处理器,将采集到的交叉口机非冲突数据输进输入设备,处理器调用存储器中存储的基于模糊聚类分析和bp神经网络的交叉口机非冲突预测模型程序,最终输出为当前该交叉口机非冲突等级。
[0042]
步骤4:智能路侧设备将输出的交叉口机非冲突等级通过5g传输给交警队指挥中心的上位机。
[0043]
步骤5:交警队根据获得的当前该交叉口的机非冲突等级及时安排适当警力和制定合理方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1