用于监测在飞行器的环境中的对象的方法和系统与流程
1.本发明涉及一种用于监测在飞行器的环境中的对象的方法。本发明还涉及一种用于监测对象的装置和系统。
背景技术:
2.已知的是,利用传感器来监测陆用运载工具的环境,为此可以将所述传感器安装在陆用运载工具上。基于这种环境监测,可以识别停留在陆用运载工具的环境中的对象。因此,可以避免由陆用运载工具的环境中的对象引起的损坏。位于地面上的飞行器也可能被停留在其环境中的对象损坏。然而,将用于监测这种对象的传感器安装在飞行器上可能是不可行的或不期望的。
技术实现要素:
3.本发明在一个方面中涉及一种用于监测位于停留在地面上的飞行器的环境中的对象的方法。该方法可以被执行以监测建筑物内和/或建筑物外的对象。换句话说,该方法可以在室内或室外予以执行。
4.对象可以是运动的对象或处于静止的对象。对象可以是运载工具,尤其是陆用运载工具,例如停机坪运载工具(vorfeldfahrzeug)。停机坪运载工具可以是用于在机场的停机坪运输行李、货物或食物的运载工具。对象也可以是机器或机器人。此外,对象也可以是生物。为了监测对象,该方法作为步骤可以具有检测对象和/或识别对象。
5.停留在地面上的飞行器可以处于静止,其中,飞行器可以停留在静止位置中或者停放位置中。这些位置中的每一个也可以是飞行器的静止位置或静态位置。飞行器可以暂时停留在静止位置或停放位置,例如用于飞行器的起飞准备,或者在较长时间段内停留,例如用于维修或制造飞行器。飞行器可以停留在建筑物内部,例如在飞机库或者生产车间内部,或者停留在建筑物外部,换句话说,停留在室内或者室外。此外可考虑,停留在地面上的飞行器对此替代地也可处于运动中,其中,飞行器于是当前可停留在运动位置中。该方法作为步骤可具有检测和/或识别停留在地面上的飞行器的静止位置或停放位置。对此替代地或补充地,该方法作为另一步骤能够具有检测和/或识别停留在地面上的飞行器的运动或运动位置。
6.停留在地面上的飞行器可位于停机坪上以用于飞行器的起飞准备、调度、停下、停放或维修。停留在地面上的飞行器可以停留在门处或停放在那里。停留在地面上的飞行器对此替代地也可以位于用于操纵飞行器的飞行跑道上。飞行器可以是飞机、飞船或直升机。因此,飞行器例如可以是商用飞机、空中出租车或滑翔飞机。
7.该方法作为另一步骤能够具有在布置在对象上的通信装置与至少一个在空间上指配给停留在地面上的飞行器的通信装置之间传输通信信号。
8.通信信号的传输可以具有在通信装置之间传送通信信号。该传输可具有通过布置在对象上的通信装置和/或通过至少一个在空间上指配给停留在地面上的飞行器的通信装
置发出和/或接收通信信号。因此,通信装置中的至少一个可为信号收发器或用于传输通信信号的发射和接收单元。
9.如果在空间上给停留在地面上的飞行器指配多个通信装置、也就是至少两个通信装置,则可以在布置在对象上的通信装置与在空间上指配给飞行器的多个通信装置之间传输同样的通信信号。对此替代地,于是也可以在布置在对象上的通信装置与多个在空间上指配给飞行器的通信装置中的相应一个通信装置之间分别传输通信信号。
10.在空间上指配给停留在地面上的飞行器的通信装置可以是与飞行器分开的装置。在通信装置的空间上所指配的状态中,该通信装置可以与飞行器间隔地布置。通信装置可布置在飞行器上或与飞行器在空间上分开布置。通信装置可布置在与飞行器分开的物体处。本发明不规定,在空间上指配给停留在地面上的飞行器的通信装置参与空中飞行器的飞行运行,以用于执行该方法。而是,在空间上指配给停留在地面上的飞行器的通信装置可为由地面人员用于仅在地面上进行飞行器的起飞准备或维修的装置。
11.该方法作为另一步骤可以具有基于所传输的通信信号来确定对象的空间方位信息。确定步骤可以具有借助用于信号处理、例如确定所传输的通信信号的传播时间的方法来确定对象的空间方位信息。为此,该方法作为另一步骤可以具有产生和/或分析所传输的通信信号,以便借助用于信号处理的方法来确定对象的空间方位信息。替代地或补充地,所传输的通信信号可以是具有关于对象的空间位置的信息的信号。为此,该方法作为另一步骤可以具有调制、发出和/或接收关于对象的空间位置的信息。
12.确定步骤可以由监测装置来执行。为此,监测装置可以具有如下确定单元,该确定单元可以设立用于根据确定步骤来确定对象的空间方位信息。布置在对象上的通信装置和/或至少一个在空间上指配给停留在地面上的飞行器的通信装置可具有监测装置或确定单元或可被设立为这样的监测装置或确定单元。一个唯一的通信装置可以具有监测装置或确定单元。对此替代地,监测装置或确定单元可分布在至少两个任意的通信装置上,其中,监测装置或确定单元可构造为用于确定对象的空间方位信息的分布式的确定系统。监测装置或确定单元也可以构造为与通信装置分开的装置,其可以与通信装置中的至少一个通信,以便确定对象的空间方位信息。
13.对象的空间方位信息可以具有对象的位置和对象的朝向或定向中的至少一个。空间方位信息可以是相对于飞行器的空间方位信息。例如,对象的空间方位信息可具有对象相对于飞行器的相对位置和对象相对于飞行器的相对朝向或相对定向中的至少一个。
14.因此,利用本发明可监测停留在地面上的飞行器的环境中的对象,而不在飞行器处预装配或安装环境检测传感器。相反,在本发明的范围中已经可基于至少一个在空间上指配给飞行器的通信装置首先确定并且然后监测在飞行器的环境中的对象的方位。因此,在本发明的其它实施方式中,例如可确定对象与飞行器的潜在碰撞和/或识别对象与飞行器的已经发生的碰撞。
15.根据所述方法的一种实施方式,确定所述对象的空间方位信息的步骤包括基于所传输的通信信号来确定所述对象相对于停留在地面上的飞行器的相对空间方位信息。对象的相对空间方位信息可以是或具有对象相对于停留在地面上的飞行器的相对位置。此外,对象的相对空间方位信息可替代于或补充于相对位置是或者具有对象相对于停留在地面上的飞行器的相对朝向或定向。对象的相对空间方位信息可在涉及飞行器的位置系统或坐
标系中确定。因此,可以在局部的或在涉及飞行器的坐标系中确定对象的空间方位信息。因此,可相对于飞行器的当前的停留部位来监测对象的当前的停留部位。此外,也可监测对象相对于飞行器的当前方位的当前的空间定向。因此,例如可以确定该对象当前是否位于飞行器周围的预先限定的安全区域中或者该对象是否朝着该飞行器运动。
16.根据该方法的另一种实施方式,该方法作为另一步骤可具有确定至少一个在空间上指配给停留在地面上的飞行器的通信装置相对于飞行器的相对空间指配信息。相对空间指配信息可具有至少一个在空间上指配给停留在地面上的飞行器的通信装置相对于飞行器的相对空间方位信息,例如相对位置和/或相对朝向或定向。相对空间指配信息可以在涉及飞行器的方位系统或局部坐标系中确定。可以借助传感器或用户输入来确定相对空间指配信息。传感器可布置在至少一个在空间上指配给停留在地面上的飞行器的通信装置上。
17.根据所述方法的另一种实施方式,基于停留在地面上的飞行器的当前空间方位信息和/或基于停留在地面上的飞行器的预先确定的几何模型来执行确定步骤。飞行器的当前的空间方位信息可具有飞行器在上级坐标系或全局坐标系中的位置和/或朝向或定向。因此,可以在上级坐标系或全局坐标系中确定对象的空间方位信息。确定步骤也可以基于所确定的至少一个在空间上指配给停留在地面的飞行器的通信装置的相对空间指配信息。因此,可将停留在地面上的飞行器的当前空间方位信息和至少一个在空间上指配给停留在地面上的飞行器的通信装置的相对空间指配信息组合,以便基于所传输的通信信号来确定对象在上级坐标系或全局坐标系中的空间方位信息。
18.停留在地面上的飞行器的预先确定的几何模型可以具有飞行器的轮廓、尤其是二维轮廓,或者空间模型、尤其是三维模型。因此,可以确定对象相对于飞行器的轮廓或模型的空间方位信息。轮廓可以是飞行器的外边框或外轮廓。模型可以是飞行器的几何建模。因此,可关于飞行器的轮廓或空间模型来监测对象的当前停留部位或对象的当前空间定向。因此,例如也可确定,该对象当前是否位于飞行器的轮廓或模型周围的预先限定的安全区域中或者该对象是否向着所述安全区域运动。安全区域为此可通过相对于飞行器周围的轮廓或相对于飞行器周围的模型的间距来撑开。
19.根据所述方法的另一种实施方式,所述通信装置中的至少一个具有用于确定关于距所述对象的位置相关的信息和关于距停留在地面上的飞行器的位置相关的信息中的至少一个的位置确定单元。因此,可在上级坐标系中、例如在机场系统中确定对象和飞行器的至少一个停留部位或至少一个位置。确定位置相关的信息可以基于卫星或者基于rfid来执行。位置确定单元可以具有用于全球导航卫星系统的接收器,例如gnss接收器或gps接收器,和/或rfid传感器,例如rfid收发器或rfid读取设备。此外,替代或除了基于所传输的通信信号确定相对位置,还可以基于距对象和飞行器的位置相关的信息来确定对象相对于停留在地面上的飞行器的相对位置。
20.根据所述方法的另一种实施方式,所述确定步骤具有基于所传输的通信信号来确定至少一个在空间上指配给停留在地面上的飞行器的通信装置与布置在对象上的通信装置之间的至少一个间距。如果在空间上给停留在地面上的飞行器指配多个通信装置,则可相应确定在相应的在空间上指配给停留在地面上的飞行器的通信装置与布置在对象上的通信装置之间的间距。因此,可以确定多个相应的间距。对象的空间方位信息因此可以基于至少一个确定的间距或基于多个确定的间距,例如借助于空间的弧形截面来确定。
21.间距可以基于信号传播时间方法或tof方法来确定。例如,可以基于通信装置之间的通信信号的检测到的信号传播时间来确定间距。因此,所述确定步骤可以具有基于在通信装置中的至少一个处确定的所传输的通信信号的发出时间和接收时间来确定通信装置之间的通信信号的信号传播时间。因此,可以以特别可靠和精确的方式来确定对象的空间方位信息。
22.根据该方法的另一种实施方式,布置在对象上的通信装置和至少一个在空间上指配给停留在地面上的飞行器的通信装置分别具有用于传送位置确定信号的通信单元。通信单元可以是位置确定传感器。此外,这两个通信单元可涉及用于确定对象的空间方位信息(例如对象相对于停留在地面上的飞行器的相对位置)的传感器对或多传感器系统。
23.通信单元可以是用于短间距无线电通信的单元,尤其是超宽带通信单元。位置确定信号可以是超宽带无线电信号。超宽带无线电信号可以具有调制的载波频率。根据一种实施方式,通信装置分别包括超宽带通信单元。可以分别基于信号传播时间方法和tdoa方法来确定对象的空间方位信息(例如,对象相对于停留在地面上的飞行器的相对位置)或超宽带通信单元之间的间距。由超宽带通信单元发出和接收的超宽带无线电信号可有利地在大的宽带上传送。
24.根据所述方法的另一种实施方式,该方法作为另一步骤具有基于所确定的对象的空间方位信息来判定对象相对于停留在地面上的飞行器的运动行为。此外,所述判定的步骤也能够基于所确定的至少一个间距来执行。对象的运动行为可以仅具有关于对象是否运动的信息。对此替代地或补充地,对象的运动行为可以具有关于对象的运动方向、运动速度或/和运动加速度的信息。对象的运动方向、运动速度和/或运动加速度可以是对象相对于停留在地面上的飞行器的相应的相对运动行为。因此,例如可判定对象的相对于停留在地面上的飞行器的相对运动方向、相对运动速度和/或相对运动加速度。基于所判定的对象的运动行为,能够预测或估计对象与飞行器的潜在碰撞。因此,在该方法的另一步骤中,也可以记录碰撞的出现或存在。此外,在另一步骤中,可以由所判定的对象的运动行为推导出对象的运动轨迹。因此,基于所推导出的运动轨迹可以判定,对象是否位于与停留在地面上的飞行器的碰撞路线上。为此,例如可将所判定的轨迹与飞行器的轮廓或模型或围绕飞行器的安全区域进行融合。因此,可以特别可靠地监测运动的对象。
25.根据该方法的另一种实施方式,重复地执行确定和判定的步骤。因此,这些步骤可以被执行以用于在循环中监测对象。因此,对象的运动行为也可相对于停留在地面上的飞行器重复地来判定。此外,例如可以重复地确定对象的空间方位信息。因此,该方法作为另一步骤可具有基于重复确定的对象的空间方位信息来监测对象相对于停留在地面上的飞行器的重复判定的运动行为。因此,该方法作为另一步骤可以包括基于重复执行的确定和/或判定的步骤来跟踪对象相对于飞行器的相对位置。因此,可以在(准)实时中确定对象的空间方位信息。
26.根据该方法的另一种实施方式,该方法作为另一步骤具有将至少一个通信装置指配给飞行器。指配可以是语义的和/或空间的指配。因此,例如可以确定,将至少一个通信装置指配给哪个飞行器或哪个飞行器类型。对此替代地或补充地,例如可确定在指配步骤中至少一个通信装置在飞行器上被布置在何处或与其相间隔地被布置。语义的和/或空间的指配可以在另一步骤中存储在监测装置中,以避免或记录对象与停留在地面上的飞行器之
间的碰撞。基于这样的将至少一个通信装置空间地和/或语义地指配给飞行器,然后可以基于所传输的通信信号将对象的所确定的空间方位信息指配给停留在地面的飞行器的当前空间方位信息和/或其预先确定的几何模型。
27.根据该方法的另一种实施方式,将至少一个通信装置指配给飞行器的步骤因此也可以包括基于预先限定的空间指配进行布置和/或识别从至少一个通信装置到预先确定的飞行器的预先限定的空间指配。预先限定的空间指配可以具有至少一个在空间上指配给停留在地面上的飞行器的通信装置与飞行器的相对的空间指配信息。因此,所述指配的步骤可包括将至少一个在空间上指配给停留在地面的飞行器的通信装置在飞行器上布置在相对于飞行器的预先限定空间方位处。因此,至少一个通信装置在飞行器处或与飞行器间隔开的布置位置可以在指配步骤中或基于该指配步骤而自动地被推导出来。因此,至少一个在空间上指配给停留在地面上的飞行器的通信装置例如可在预先限定的方位中布置在用于固定飞行器的停放位置的机构(例如车轮楔)处或在用于保护飞行器构件的机构(例如涡轮机入口覆盖件)处。
28.根据另一种实施方式,布置在对象上的通信装置和在空间上指配给停留在地面上的飞行器的通信装置分别具有用于传送激活信号的激活单元。由布置在对象上的通信装置的激活单元发出的或传送的激活信号可以由激活单元从在空间上指配给停留在地面上的飞行器的通信装置接收。因此,该方法可以在另一步骤中具有激活信号在激活单元之间的传送。基于所传送的激活信号,可以激活通信装置的至少一个通信单元,尤其是在空间上指配给停留在地面上的飞行器的通信装置的通信单元。通信单元也可以替代地由布置在对象上的通信装置基于所传送的激活信号来激活。激活信号因此可以在激活单元之间被传送,以便激活至少一个或所有的通信单元。
29.激活单元可以是用于无线电通信的单元。激活单元可以具有位置确定传感器。激活单元可访问由位置确定传感器确定的对象和/或飞行器的位置,以便基于此发出激活信号或利用该激活信号在对象和/或飞行器的通信装置之间传输关于该对象和/或飞行器的确定的位置的信息。
30.激活单元可以是一个亚ghz激活单元。激活信号能够是亚ghz无线电信号。可以在窄带范围内发出和接收亚ghz无线电信号。与超宽带无线电信号相比,可以在较大的作用范围内并且以较低的能量需求产生和发射亚ghz无线电信号。
31.因此,可以根据所传送的激活信号来执行所述传输的步骤。布置在对象上的通信装置的通信单元和/或至少一个在空间上指配给停留在地面上的飞行器的通信装置的至少一个通信单元可首先处于去激活状态中,其中,在去激活状态中在通信装置之间不传输通信信号或位置确定信号。如果基于所传送的激活信号激活通信装置的通信单元,则可以作为下一步骤在通信装置的通信单元之间传送通信信号或位置确定信号。因此,通过激活单元对通信单元的激活和/或基于此的通信信号的传输可以根据用于激活通信单元的激活信号已被传送而执行。激活信号的传送又可根据该对象在飞行器的环境中停留多远来执行。对象相对于飞行器的相对停留部位或相对位置可传感地例如基于相应的卫星定位或基于rfid来执行。当对象接近飞行器和/或当对象停留在飞行器周围的监测区域中时,可以传送激活信号。基于这样传送的激活信号来激活或唤醒通信单元可以降低通信单元的能耗。
32.根据另一种实施方式,激活信号具有对象在上级坐标系中的空间方位信息。对象
的利用激活信号传送的空间方位信息可与飞行器在上级坐标系中的预先确定的空间方位信息相比较。因此可确定,对象是否停留在飞行器周围的监测区域中。空间方位信息可以具有在局部坐标系或上级坐标系中的对象和飞行器的当前位置,其中可以分别基于卫星或基于rfid来检测位置。基于这些位置,可推导出对象与飞行器之间的相对位置或间距,并且将其与预先确定的相应阈值进行比较。因此,也可根据在对象与飞行器之间的当前的间距是否低于预先确定的相应的阈值来执行传输的步骤。
33.根据另一种实施方式,在执行该方法时,停留在地面上的飞行器位于停放位置中。因此,飞行器可以停放在机场的停机坪上。在此,飞行器处于静止中。
34.根据该方法的另一种实施方式,至少一个在空间上指配给停留在地面上的飞行器的通信装置安装在与飞行器分开的物体处。所述物体可以是用于固定飞行器的停放位置的机构。例如,用于固定飞行器的停放位置的机构是用于将飞行器的起落架或者轮固定在停靠位置的车轮楔。物体能够为用于保护飞行器构件的机构。例如,用于保护飞行器构件的机构是涡轮机入口覆盖件。至少一个在空间上指配给停留在地面上的飞行器的通信装置能够预装配在用于固定飞行器的停放位置的机构上和/或预装配在用于保护飞行器构件的机构上。用于固定飞行器的停放位置的机构和/或用于保护飞行器构件的机构也可以为了执行该方法而暂时地设有通信装置。
35.根据另一种实施方式,至少一个在空间上指配给停留在地面上的飞行器的通信装置可在能量方面自给自足地运行。在空间上指配给停留在地面上的飞行器的通信装置可以构造为电池驱动的通信装置。因此,通信装置可以具有电池或蓄电池,利用该电池或蓄电池可以给通信装置供应能量。通信装置的通信单元和/或激活单元可因此有利地以能量方面自给自足的方式来运行,以便监测在飞行器的环境中的对象。
36.根据另一种实施方式,该方法作为另一步骤具有将基于对象的所确定的空间方位信息的信息信号传送给监测装置以用于避免或记录在对象与停留在地面上的飞行器之间的碰撞。然后,可在另一步骤中在飞行器上审查和/或消除由所记录的碰撞可能产生的损坏。在碰撞时,在对象与飞行器之间可存在至少一个接触。传送的信息信号还可以基于所判定的对象的运动行为。监测装置可以是与至少一个所描述的通信装置通信的装置,尤其是移动终端设备,例如智能手机或平板电脑。监测装置也可以是在线服务或者用于监测对象的网络服务。监测装置可执行或引起至少一个另一步骤,以便避免或记录在对象与停留在地面上的飞行器之间的碰撞。因此,监测装置可以是碰撞避免装置和/或碰撞记录装置。因此,该方法也可以被执行以避免或记录在对象与停留在地面上的飞行器之间的碰撞。此外,该方法可被执行以避免可由于对象与停留在地面上的飞行器的潜在碰撞而在飞行器上产生的损坏。
37.根据另一种实施方式,该方法作为另一步骤具有根据对象的所确定的空间方位信息干预对象的运行以避免对象与停留在地面上的飞行器之间的碰撞。该步骤可以由监测装置来实施。对对象的运行的干预还可以根据所判定的对象的运动行为来执行。对对象的运行的干预可以具有对用于控制对象的运动的动态系统的干预。对此替代地或补充地,对对象的运行的干预能够具有对用于运行对象的辅助系统的干预。此外,对此替代地或补充地,对对象的运行的干预可具有对警报系统的干预,所述警报系统用于警报对象或对象的操作者注意对象与停留在地面上的飞行器之间的潜在碰撞。
38.根据另一种实施方式,该方法作为另一步骤具有基于对象的所确定的空间方位信息触发警报信号以警报在对象与停留在地面上的飞行器之间的潜在碰撞。警报信号可以与对象通信或者在对象上触发。监测装置可以设立用于触发或传送警报信号。为此,监测装置可以与在对象上存在的警报装置通信,该警报装置可以触发或发出警报信号。此外,通过警报装置触发或发出警报信号或与警报装置通信以达到该目的可以理解为对对象的运行的示例性干预。如果对象是运载工具,则例如可以警报驾驶员或者在自主运载工具的情况下也警报运载工具的操作者或运营者在对象和停留在地面上的飞行器之间的潜在碰撞。
39.根据所述方法的另一种实施方式,所述方法作为另一步骤具有基于对象的所确定的空间方位信息确定在对象与停留在地面上的飞行器之间是否发生或已经发生碰撞。因此,作为避免碰撞的替代或补充,该方法也可以被实施用于记录或用于确定在对象与停留在地面上的飞行器之间发生的或已经发生的碰撞。因此,即使通过表面损坏检验不能由此识别出飞行器上的碰撞和/或由此导致的损坏,也可以利用本发明识别出飞行器上的碰撞和/或由此导致的损坏。这基于如下认识,即,在飞行器上的碰撞损伤仅可在这样的材料区域中产生,即,所述材料区域在飞行器的表面(例如机身外表面)处不可识别。这尤其在飞机机身中使用的复合材料中能够是这种情况。
40.该方法作为另一步骤可以具有,如果已经确定对象与飞行器之间的碰撞,则确定飞行器上的碰撞部位。确定碰撞部位的步骤可以基于所确定的对象的空间方位信息来执行。确定碰撞部位的步骤还可以基于停留在地面上的飞行器的当前空间方位信息和/或其预先确定的几何模型来执行。因此,可以用该方法以有利的方式识别和记录表面上或飞行器的外部轮廓处不可识别的损伤的碰撞部位,以便在飞行器再次处于驾驶或空中运行之前,揭示和消除这样的隐蔽的损伤,该隐蔽的损伤对于飞行器的运行而言可能是安全相关的。
41.在另一方面中,本发明涉及一种装置,其被设立用于与布置在对象上的通信装置和至少一个指配给停留在地面上的飞行器的、尤其是在空间上和/或在语义上指配给停留在地面上的飞行器的通信装置中的至少一个通信。对象可以是陆用运载工具。该装置可以是用于避免碰撞的碰撞避免装置或者用于警报碰撞的碰撞警报装置。替代地或补充地,该装置可以是碰撞记录装置。该装置可以被设立用于促使在通信装置之间传输通信信号。该装置可以是移动终端设备,例如智能手机或平板电脑。该装置可以是便携式装置。针对前述方面所描述的每种实施方式或针对前述方面所描述的每个特征可以被理解为根据该方面的装置的相应的实施方式或相应的特征,反之亦然。
42.该装置可以具有接口,该接口被设立用于读入数据,该数据可以基于在通信装置之间传输的通信信号。作为该接口的替代或补充,该装置可以具有至少一个另外的接口,该另外的接口可以被设立用于读入和/或输出基于执行关于前述方面所描述的方法步骤中的至少一个方法步骤的数据。
43.该装置可以具有确定单元,该确定单元可以被设立用于基于所读入的数据来确定对象的空间方位信息。作为确定单元的替代或补充,该装置可以具有至少一个另外的单元,该另外的单元可以被设立用于执行关于上述方面所描述的方法步骤中的至少一个方法步骤或者用于执行关于上述方面所描述的方法步骤中的至少一个方法步骤。
44.在另一方面中,本发明涉及一种用于监测位于停留在地面上的飞行器的环境中的
对象的系统。该系统可以是用于避免碰撞的碰撞避免系统或者用于警报碰撞的碰撞警报系统。替代地或补充地,系统可以是碰撞记录系统。针对以上方面描述的每种实施方式或针对以上方面描述的每个特征可以被理解为根据该方面的系统的相应的实施方式或相应的特征,反之亦然。系统可以是便携式系统。
45.系统可以具有至少一个可指配给停留在地面上的飞行器的通信装置作为系统部件,该通信装置可以设立用于与布置在对象上的通信装置通信。对象可以是陆用运载工具。该系统可以具有布置在对象上的通信装置作为另一系统部件。该系统具有根据前述方面的装置作为另一系统部件。
46.此外,所述系统可以具有针对上述方面之一所描述的每个另外的物体或每个装置、例如针对所述方法的上述方面所描述的警报装置。此外,系统可以被设立用于执行针对方法的方面所描述的方法步骤中的至少一个方法步骤。
47.根据系统的一种实施方式,至少一个可指配给停留在地面上的飞行器的通信装置构造为便携式系统部件。因此,通信装置可以由操作员、例如机场的操作人员而不用补充的辅助手段来操作。此外,通信装置可无工具地被指配给飞行器。此外,可以考虑的是,通信装置可以由操作员远程控制。操作员可以是人或机器人。
附图说明
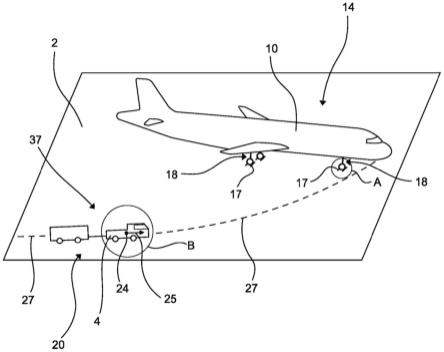
48.图1示出了飞行器和对象,以用于阐述本发明。
49.图2示出了指配给飞行器的通信装置,以用于进一步阐述本发明。
50.图3示出了布置在对象上的通信装置,以进一步阐述本发明。
51.图4示出了根据本发明的相应的实施方式的系统、装置和通信装置。
52.图5示出了在碰撞之前的飞行器和对象,以进一步阐述本发明。
53.图6示出了在碰撞时的飞行器和对象,以用于进一步阐述本发明。
54.图7示出带有根据本发明的一种实施方式的用于监测停留在飞行器的环境中的对象的方法的方法步骤的示意性流程图。
具体实施方式
55.图1示出了停留在地面2上的飞行器10。在一种实施方式中,飞行器10可以是在机场的停机坪上可以位于停放位置14中的飞机。飞行器10在地面2上当前位于静止位置中,例如位于这样的停放位置14中。为了固定停放位置14,用于固定停放位置14的机构可以布置在飞行器10的起落架18上。用于固定停放位置14的机构可为车轮楔17。在一种实施方式中,车轮楔17能够布置在飞机的车轮上。
56.可处于运动中的对象20位于停留在地面2上的飞行器10的环境中。在一种实施方式中,对象20可以是停机坪运载工具4。在停机坪运载工具4上可以悬挂至少一个用于运输货物或人员的挂车。对象20可以在地面2上沿着运动轨迹27前进。在此,对象20可位于与飞行器10的碰撞路线上。在一种实施方式中,对象20可因此与飞行器10的机身碰撞。相对于飞行器10,对象20具有可确定对象20尤其沿着运动轨迹27相对于飞行器10的位置的相对位置24。此外,对象20可以具有如下运动方向25,该运动方向可以确定与运动轨迹27相切的方向。对此替代地,对象20的运动方向25也可以是指对象20相对于飞行器10的相对朝向并且
尤其是关于在参考飞行器10的参考系统中的参考方向来规定。
57.基于对象20与飞行器10的潜在碰撞,在图1中所示的情况中,对象20位于非关键的对象位置37中。在此,对象20可以位于在附图中未示出的安全区域之外。安全区域可与飞行器10的外轮廓相间隔地来构造或撑开。例如,安全区域可通过飞行器10的外轮廓在地面2上的投影和所选择的围绕飞行器10的间距来形成。
58.在图2中更详细地示出在图1中以a表示的在飞行器10上的区域。在图2中示出了起落架18的起落架部件,在该起落架部件上布置有用于固定停放位置14的机构。在一种实施方式中,起落架部件是起落架18的至少一个车轮19。在一种实施方式中,两个车轮楔17成对地布置在车轮19处。因此可避免飞行器10的滚动。
59.此外,在图2中示出指配给停留在地面2上的飞行器10的通信装置11。通信装置11经由其在飞行器10上的布置位置而在空间上被指配给该飞行器10。因此,布置位置可以是相对于飞行器10的、参照该飞行器10的相对布置位置。通信装置11的布置位置可通过起落架部件和/或用于固定停放位置14的机构来在几何上确定。因此,通信装置11在飞行器10上的布置位置可通过以下参数中的至少一个来确定:起落架部件的预先限定的尺寸、起落架部件在飞行器10上的方位、用于固定停靠位置14的机构在空间上相对于飞行器10的尺寸。因此,可在参考飞行器10的坐标系中确定通信装置11的位置。
60.通信装置11也可以具有作为通信单元的超宽带通信单元12。通信装置11可以具有亚ghz激活单元13作为激活单元。通信装置11也可以具有位置确定单元16。此外,通信装置11可以具有用于为通信装置11供电的、在附图中未示出的电池。
61.图3在图1中标记的区域b中更详细地示出了对象20。在对象20上布置有另一通信装置21。另一通信装置21可以如针对图2所描述的通信装置11那样构造。另外,另一个通信装置21也可以具有作为一个通信单元的超宽带通信单元22。它可以与指配给飞行器10的通信装置11的超宽带通信单元12通信。另一通信装置21可以具有亚ghz激活单元23作为激活单元,其可以与指配给飞行器10的通信装置11的亚ghz激活单元13进行通信。另一通信装置21可具有位置确定单元26,其可如指配给飞行器10的通信装置11的位置确定单元16那样来构造。根据一种实施方,位置确定单元16、26是相应的gnss接收器。
62.在对象20上可以布置用于与两个通信装置11、21中的至少一个进行通信的装置30。装置30可以与至少一个通信装置11、21有线或基于无线电地连接。在一种实施方式中,装置30与布置在对象20上的通信装置21连接。装置30可以是移动终端设备32,其可以被携带在对象20上。替代于此,装置30也可以固定地布置在对象20上。
63.装置30可以与警报装置35连接,以警报对象20与飞行器10的潜在碰撞。在此,这种连接可以是有线连接或基于无线电的连接。警报装置35可发出可在对象20与飞行器10的潜在碰撞之前发出的警报信号8。在一种实施方式中,警报装置35可以是可以发出可视警报信号8的可视警报装置35。如果对象20是停机坪运载工具4,则例如可以在停机坪运载工具4上布置作为警报装置35的警报灯,该警报灯可以就潜在的碰撞通过光信号来警报停机坪运载工具4的在附图中未示出的停机坪运载工具4的驾驶员或运营者。
64.图4示出根据本发明的一种实施方式的用于监测位于停留在地面2上的飞行器10的环境中的对象20的系统40。系统40具有至少一个可指配给停留在地面2上的飞行器10的通信装置11。在所示的实施方式中,系统40具有至少三个这种通信装置11。至少一个或至少
三个通信装置11可以如关于图2所描述的通信装置11那样构造。在此,每个通信装置11可以具有相应的超宽带通信单元12、亚ghz激活单元13和可选的位置确定单元16。
65.系统40可以具有布置在图4中未示出的对象20上的通信装置21,该通信装置可以如关于图3描述的那样构造。通信装置21也可以包括超宽带通信单元22、亚ghz激活单元23和可选的位置确定单元26。
66.基于利用位置确定单元16、26判定的相对位置24或在位置确定单元16、26之间的间距,可以确定飞行器10与对象20之间的当前间距。根据所确定的当前间距,布置在对象20上的通信装置21的亚ghz激活单元23可以发出激活信号,该激活信号可以具有亚ghz无线电信号7。亚ghz无线电信号7可以由被指配给飞行器10的通信装置11的亚ghz激活单元13接收。然后,可以激活指配给飞行器10的通信装置11的超宽带通信单元12。事先可以将这些单元去激活。由此,被指配给飞行器10的通信装置11的超宽带通信单元12能够利用超宽带无线电信号5与布置在对象20上的通信装置21的超宽带通信单元22进行通信。通过在超宽带通信单元12、22之间传输的相应的超宽带无线电信号5,可以基于传输的超宽带无线电信号5来确定对象20的空间方位信息。尤其地,这可基于所传送的超宽带无线电信号5的信号传播时间来执行。
67.基于在图4中未示出的飞行器10上的通信装置11的相应的布置位置和在相应的指配给飞行器10的通信装置11与布置在对象20上的通信装置21之间的相应的间距确定,可确定布置在对象20上的通信装置21的位置和因此在参考飞行器10的坐标系中的对象20的位置。为此,间距确定可以基于所分析的超宽带无线电信号5。此外,基于所确定的间距,位置确定例如可以利用基于间距确定的空间的弧形截面来执行。为了分辨多义性或者为了执行三维位置确定,为此可能需要至少三个间距。因此,对象20相对于飞行器10的当前位置可被确定为对象20相对于飞行器10的相对位置24。
68.对象20的相对位置24可以通过接口33与装置30通信。基于由装置30通过接口33读入的相对位置24,该装置可以在装置30的在图中未示出的确定单元中确定,该相对位置24是在图1的(初始)情况中示出的非关键的对象位置37还是在图5中示出的关键的对象位置38。如果是关键的对象位置38,在该关键的对象位置中对象20位于飞行器10周围的安全区域内,则装置30可以与警报装置35如此通信,以便促使警报装置35输出警报信号8,以警报对象20与飞行器10之间的潜在碰撞。
69.装置30还可以利用网络服务50来传送相对位置24。装置30可以例如借助于移动无线电与网络服务50通信。网络服务50可以是装置30的组成部分或者反过来。网络服务50或装置30可存储和/或进一步分析所确定的相对位置24。例如,因此可基于重复确定的相对位置24推断出在图1中示出的运动轨迹27或者预测该运动轨迹。
70.在图5中,对象20与其在图1中示出的初始位置相比沿着运动轨迹27进一步向飞行器10运动。在其当前方位,对象20相对于飞行器10具有关键的对象位置38。如关于图4所描述的那样,这基于在通信装置11、21之间所传送的超宽带无线电信号5来确定。在图5中示出的情况中,在图3中示出的警报信号8可由警报装置35发出,以便警报对象20与飞行器10的继续面临的碰撞。
71.在图6中示出了对象20与飞行器10之间的碰撞3。对象20在确定的运动轨迹27上继续前进,其中,所述对象现在到达飞行器10上的碰撞部位15处、例如到达飞行器10的机身上
的某一部位处并且在那里与飞行器10碰撞。基于在图4中描述的对象20的位置确定,可推导出飞行器10上的碰撞部位15,并且可与装置30或网络服务50进行通信。碰撞部位15可被如此记录,以便记录飞行器10上的损伤部位。如果在损伤部位处存在由于碰撞3在表面上不可识别的损伤,例如在机身中的复合材料的内部中,在飞行器10离开其停放位置14之前,可基于所记录的碰撞部位15使损伤露出并且被消除。因此,能够有效地定位并消除在表面上不可识别的损伤。
72.因此,根据所述方法的相应的实施方式,一方面能够警报碰撞3,并且另一方面替代于此或补充于此记录已发生的碰撞3。因此,系统40可以是碰撞避免系统和/或碰撞识别系统。
73.图7根据一种实施方式以序列示出用于监测位于停留在地面2上的飞行器10的环境中的对象20的方法的方法步骤。
74.在第一步骤s0a中,可执行通信装置指配。在该步骤中,如关于图2所描述的那样,通信装置11可在空间上被指配给飞行器10。为此,通信装置11可安装在用于固定飞行器10的停放位置14的机构处,该机构可因此布置在相对于飞行器10已知的布置位置中。因此,可以确定在通信装置11与飞行器10之间的空间关系。对此补充地,通信装置11可在语义上被指配给飞行器。在此,通信装置11可被指配给特定的飞行器类型。因此,通信装置11的安装位置或指配位置可基于相应的飞行器类型的已知模型自动地被推导出。此外,相对位置24也可以自动地参考飞行器10由指配给该飞行器10的通信装置11推导出。
75.指配给飞行器10的通信装置11的通信单元(在一种实施方式中为超宽带通信单元12)可首先被去激活。如果对象20接近飞行器10,则在另一步骤s0b中可以执行激活信号传送。在该步骤中,激活单元13、23可以彼此通信,以便使被去激活的、指派给飞行器10的通信装置11的通信单元被激活。通过激活通信单元,可以降低根据一种实施方式的能在能量方面自给自足地运行的通信装置11的能量需求。当对象20位于在图5中示出的关键的对象位置38中或安全区域内时,才发出用于激活通信装置11的激活信号。关键的对象位置38可以通过位置确定单元16、26由相应的位置确定来推导出。根据一种实施方式,位置确定单元16、26可以是gnss接收器。
76.基于指配给飞行器10的通信装置11的被激活的通信单元,可以在另一步骤s1中执行通信信号传输。在该步骤中,可以在通信装置11、21的通信单元或超宽带通信单元12、22之间如关于图4所描述的那样传送超宽带无线电信号5。基于布置在对象20上的通信装置21与在空间上指配给停留在地面2上的飞行器10的通信装置11之间的无线电信号的这种传输,可确定对象20相对于飞行器10的相对位置24。因此,在另一步骤s2中可以执行方位信息确定,其中,可以将对象20的相对位置24确定为对象20的空间方位信息。
77.如果步骤s1和s2重复地或连续地实施,则因此可连续地确定对象20相对于飞行器10的相对位置24,并且由此推导出在图1、图5和图6中示出的运动轨迹27。因此,监测对象20相对于飞行器10的相对位置24可包括推导和预测对象20的移动轨迹27。因此,在另一步骤s3中可以执行运动行为判定。因此,对象20可以被动态地监测。在该步骤中可以确定,对象20是否又离开安全区域或者不再位于与飞行器10的碰撞路线上。
78.在另一步骤s4中,可以执行与装置30或网络服务50的信息信号传送。基于在布置在对象20上的通信装置21和装置30之间传输的信息信号,装置30于是可以与警报装置35通
信,以便触发警报信号8。
79.在另一步骤s5中,可以在对象20上执行运行干预,以便防止对象20与飞行器10的潜在碰撞。例如,这种运行干预可以具有在对象20上触发警报信号8。对此替代地或补充地,运行干预可以具有对对象20的动态的干预,在所示的实施方式中具有对停机坪运载工具4的行驶动态的干预。作为对运行干预的替换或补充,可以存储或记录在图6中发生的碰撞3,其中这可以由网络服务50来执行。
80.附图标记列表
81.2 地面
82.3 碰撞
83.4 停机坪运载工具
84.5 超宽带无线电信号
85.7 亚ghz无线电信号
86.8 警报信号
87.10 飞行器
88.11 通信装置
89.12 超宽带通信单元
90.13 亚ghz激活单元
91.14 停放位置
92.15 碰撞部位
93.16 位置确定单元
94.17 车轮楔
95.18 起落架
96.19 车轮
97.20 对象
98.21 通信装置
99.22 超宽带通信单元
100.23 亚ghz激活单元
101.24 相对位置
102.25 运动方向
103.26 位置确定单元
104.27 移动轨迹
105.30 装置
106.32 移动终端设备
107.33 接口
108.35 警报装置
109.37 非关键的对象位置
110.38 关键的对象位置
111.40 系统
112.50 网络服务
113.s0a 通信装置指配
114.s0b 激活信号传送
115.s1 通信信号传输
116.s2 方位信息确定
117.s3 运动行为判定
118.s4 信息信号传送
119.s5 运行干预
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1