一种信号路口机动车排队车辆轨迹重构方法
1.本发明提供一种信号路口机动车排队车辆轨迹重构方法,属于交通工程领域。
背景技术:
2.在以往的交通流分析领域,通常使用完善的宏观交通流模型,例如使用最为广泛的美国公路局开发的bpr函数,该方法以车辆通过路段的自由流行驶时间以及该路段的通行能力、交通流量为输入。但对于信号干道,由于交通信号和行人对交通流带来的巨大干扰,宏观模型可能不再适用。
3.随着智能交通系统(its)的发展,车辆gps定位技术及卡口系统发展迅速,针对个体车辆完整轨迹数据的重构研究大量涌现。因此,针对交通流的分析也从宏观层面逐渐过渡到微观层面。卡口系统可以从彩色、黑白或红外摄像机拍摄的图像中识别车辆的车牌号、通过该设备的瞬时时间戳、信号周期内交通流量等大量的交通流信息,凭借上述信息,国内外研究者开发了基于多种不同数据源类型的车辆轨迹重构方法;除了固定位置的卡口系统外,移动交通传感器能够跟随车辆一起移动,它们包括探测车、gps设备和手机定位等,通过数据融合,再结合特定的轨迹重构算法,可以还原出车辆的详细运动轨迹。重构个体车辆轨迹信息有相当大的后续应用价值,例如:将车辆轨迹与驾驶员数据进行匹配,可为居民出行模式识别、城市内部车辆限行政策影响分析提供理论参考;将车辆轨迹与精细化的排放模型相结合,可以准确估算出机动车尾气排放等。
4.车辆的轨迹数据具有非常丰富的时空信息,但实际中往往完整的车辆轨迹很难获得,因此在过去20年中,研究者对基于线圈、浮动车、卡口系统等数据重构出车辆轨迹信息的问题进行了大量研究。大致共分为三类:插值法、速度递推法,以及基于交通流模型的方法。其中,插值法和速度递推法原理简单、计算量小,但同时精度不高,无法较好地反映车辆真实轨迹;而基于交通流模型的方法在轨迹重构中结合了交通流运行规律的影响,相比简单的滤波、插值法和速度递推法,能重构出更为精确的车辆轨迹,同时对于交通拥堵和过渡状态具有较好的鲁棒性。交通流模型最早发展于运动波(kinematic wave)模型,也称为lwr模型。在此模型基础上,coifman基于三角形基本图(triangular fundamental diagram)的lwr模型提出了一种新型的轨迹重构方法,该方法利用路段上游或下游位置检测到的车速与车头时距信息估计路段上所有车辆的轨迹以及对应的旅行时间,该模型在速度递推的过程中考虑了交通波传播速度的影响,将路段时空图分为多个等速三角形及梯形区域,使得时空特征更接近高速公路瓶颈处的真实状态,在复杂交通状况下可以表现出更佳的重构特性。coifman模型的应用场景主要是高速公路,对于城市道路路段并不适用,对此不少学者尝试利用数据融合手段和更复杂的交通流模型来解决该类问题。mehran等基于三维运动波模型和变分理论(vf theory)提出了一种新的数据融合框架,通过对出租车和断面检测等数据的融合实现城市主干道上车辆轨迹的重构。三维运动波模型是结合运动波模型和累积曲线原则提出的一种能够有效估计激波状态的交通流模型,而变分理论是针对该模型提出的一种在离散时空中根据边界状态求取未知节点累积通过车辆数目的方法。sun等基于变
分理论通过融合浮动车和信号配时数据对车辆轨迹进行重构。
5.但是目前基于交通流模型的轨迹重构方法,大多针对单一数据源类型,且所需输入信息种类较多,例如样本车辆的车速、时间戳,特定时间段内的车流量、平均车头时距等信息。又由于针对目前常见的交通信息采集技术(如:环形感应线圈、视频检测器、基于gps动态信息采集技术、基于车牌识别采集技术等),各项技术的采集功能略有不同,上述车辆轨迹重构方法无法直接满足应用于所有数据源类型,通常需先进行数据融合与数据匹配,工作量大、计算难度大、耗时长。另外,近几年来,基于交通流模型提出的车辆轨迹重构方法,多为优化问题,在寻找最优解时,用到的启发式算法(如:粒子群算法、模拟退火算法、遗传算法等),需经过多次迭代求解,再次增加了计算求解的难度。
6.因此,本发明提出了一种可直接适用于多种常见交通信息采集技术且计算求解难度小的轨迹重构方法。
技术实现要素:
7.为解决目前车辆轨迹重构算法适用范围小、对数据源结构要求高的问题,本发明提出了一种适用于大部分交通信息源数据的信号路口机动车排队车辆轨迹重构方法。
8.本发明为实现其发明目的所采取的技术方案:一种信号路口机动车排队车辆轨迹重构方法,所述方法包括步骤:
9.s1、规定信号干道上排队车辆依次经历的驾驶状态包括:巡航、减速、空转、加速、再巡航,并且所有排队车辆均在一个交通信号周期内通过下游真实停止线(即不考虑车辆过饱和的情况);从任一交通信号周期中红灯结束绿灯开始时刻,排队车辆以交通流消散波的速率开始消散,即:所有排队车辆不在同一时刻由空转状态转变为加速状态,所有排队车辆开始消散的时刻分布在车辆轨迹的位置-时间关系图象中的交通流消散波上;将上游虚拟停止线及下游真实停止线的位置分别记为x
up
、x
down
,所述上游虚拟停止线是指所要重构的排队车辆轨迹的起始位置,所述下游真实停止线是指所要重构的排队车辆轨迹的结束位置;将排队车辆分为样本车辆和非样本车辆,所述样本车辆是指有被采集到车辆时间戳数据信息的排队车辆,所述非样本车辆是指没有被采集到车辆时间戳数据信息但真实存在的排队车辆;
10.(补充说明:交通流消散波指的是绿灯开始后,车辆消散的波;交通流冲击波指的是红灯开始后,车辆开始排队的冲击波。两者都是由同一交通信号周期内第一辆排队车辆传递到下一辆排队车辆直至最后一辆排队车辆。由于交通流的消散波速率与冲击波速率相比,消散波速率通常非常稳定,因此本发明中将消散波速率视作恒定值,而冲击波速率由相邻两辆样本车辆所决定。交通信号周期时长信息已知,包括红灯时长、绿灯时长。)
11.s2、重构任一交通信号周期内样本车辆的轨迹,包括根据样本车辆时间戳数据信息确定该交通信号周期内的交通流冲击波边界,具体为:
12.s2-1、获取样本车辆i通过上游虚拟停止线及下游真实停止线的时间戳,分别记为
13.s2-2、规定一时间调整量t
ad
,记样本车辆i经调整后通过下游真实停止线的时间为且满足(每个样本车辆对应的时间调整量t
ad
可能不同。)
14.s2-3、已知样本车辆i经调整后通过下游真实停止线的时间为并且假设在红灯
结束绿灯开始后样本车辆i以全巡航状态通过下游真实停止线(真实情况应该是先加速再达到巡航,由此造成的时间误差已考虑进时间调整量t
ad
中),根据车辆轨迹的位置-时间关系图象中的几何关系,将交通流消散波与样本车辆i的巡航轨迹(再巡航轨迹)的交点确定为样本车辆i结束空转状态开始加速状态的时空信息,记为其中,为样本车辆i结束空转状态开始加速状态的时刻,为样本车辆i结束空转状态开始加速状态的位置;(即:从该交通信号周期中红灯结束绿灯开始的时刻点出发,画一条以交通流消散波的速率(记为vd)为斜率的直线,则交通流消散波在该直线上;从点出发,画一条以巡航速率(记为vf)为斜率的直线,与交通流消散波相交于点该点的物理意义即为样本车辆i结束空转状态开始加速状态的时空信息。)
15.(补充说明:由于该轨迹重构方法的步骤为先假设排队车辆在上游虚拟停止线和下游真实停止线之间的行驶状态为“巡航-空转-再巡航”,以确定“空转”状态结束的时空信息,再分别添加“空转”状态开始前的“减速”状态、“空转”状态结束后的“加速”状态,所以步骤s2-3中的“巡航轨迹”是指“再巡航轨迹”。)
16.s2-4、已知样本车辆i通过上游虚拟停止线时的时间戳位置x
up
和结束空转状态开始加速状态时所处的位置根据距离差,即并且假设车辆减速速度为已知量dc,车辆的巡航速率为已知量vf,由此计算出样本车辆i在减速状态前经历的巡航位移和时长以及经历减速状态的时长进而获得样本车辆i结束减速状态开始空转状态的时空信息,记为其中,为样本车辆i结束减速状态开始空转状态的时刻,为样本车辆i结束减速状态开始空转状态的位置;
17.s2-5、引入点a以区分排队车辆与自由流车辆(非排队车辆);(由于样本车辆的渗透率通常无法达到100%,所以通常无法直接确定一个周期内的最后一辆样本车辆是否就是一个周期内所有排队车辆中的最后一辆,因此引入点a以区分排队车辆与自由流车辆。)
18.s2-6、在车辆轨迹的位置-时间关系图象中,将与点a用直线连接,即可得到该交通信号周期内的交通流冲击波边界;
19.s3、重构该交通信号周期内非样本车辆的轨迹,具体包括:
20.s3-1、假设两个连续样本车辆之间的非样本车辆在开始加速时所处的位置坐标均匀分布在此两个连续样本车辆之间,即均匀分布在所述交通流消散波上,由此确定出非样本车辆j结束空转状态开始加速状态的时空信息,记为其中,为非样本车辆j结束空转状态开始加速状态的时刻,为非样本车辆j结束空转状态开始加速状态的位置;假设两个连续样本车辆之间的非样本车辆在开始空转时所处的位置坐标均匀分布在此两个连续样本车辆之间,即均匀分布在所述该交通信号周期内的交通流冲击波边界上,由此确定出非样本车辆j结束减速状态开始空转状态的时空信息,记为其中,为非样本车辆j结束减速状态开始空转状态的时刻,为非样本车辆j结束减速状态开始空转状态的位置;
21.s3-2、记两个连续样本车辆为样本车辆i和样本车辆i+1,估计此两个连续样本车
辆之间的非样本车辆数n
l
,具体为:
[0022][0023]
其中,q
l
代表流率,不同的相邻样本车辆之间的流率可能不同;(即:两个连续样本车辆间的非样本车辆以q
l
为到达率通过上游虚拟停止线。)
[0024]
s3-3、确定与的具体时空信息,具体为:
[0025]
对与构成的冲击波边界线段与消散波线段分别进行(n
l
+1)等分,得:
[0026][0027]
其中,为样本车辆i结束空转状态开始加速状态的时空信息,为样本车辆i+1结束空转状态开始加速状态的时空信息,为样本车辆i结束减速状态开始空转状态的时空信息,为样本车辆i+1结束减速状态开始空转状态的时空信息;
[0028]
s3-4、根据步骤s2的方法逆推得到非样本车辆j通过上游虚拟停止线及下游真实停止线的时间戳,分别记为
[0029]
与现有技术相比,本发明的有益效果:
[0030]
(1)本发明方法只需要收集到排队样本车辆通过上游虚拟线及通过下游真实停止线的时间戳即可对所有排队车辆进行某一交通信号周期内、某一信号干道上的轨迹重构,该方法所要求的数据源结构简单,可直接适用于多种现有交通信息采集技术,模型输入易于获取,并且计算求解难度小。
[0031]
(2)本发明方法考虑了车辆不同的行驶状态(巡航、减速、空转、加速、再巡航);同时,考虑到车辆经过路口时,面对行人、车辆汇流等复杂情况,而引入时间调整量t
ad
,并且不将其视为恒定常数值,以减少车辆重构轨迹与地面真实轨迹之间的误差。因此,本发明方法能够满足对车辆轨迹微观层面的重构研究,并且采用本发明方法重构的车辆轨迹更接近于地面真实轨迹。
[0032]
进一步地,所述时间调整量t
ad
的确定方法包括步骤:
[0033]
s2-2-1、获取样本车辆i中各个轨迹点之间的加速度:通过先计算两个轨迹点的速度,再确定此两个轨迹点之间的加速度的方法来获取样本车辆i中各个轨迹点之间的加速度;计算所涉及的基本公式如下:
[0034]
基本公式1:x=h(v)n+z;
[0035]
基本公式2:
[0036]
基本公式3:
[0037]
上述基本公式1、基本公式2和基本公式3中,n表示从某个参考车辆通过开始,到时
间t之前通过某个位置x的车辆累计数量;dv取定值;h(v)、h
′
(v)均为与速度v相关的已知量,z是已知量;n与x是线性相关的,用基本公式1表示;由基本公式1求导得出基本公式2,这意味着位置的变化量dx与n也是线性相关的;因此,在给出车辆某时刻的速度v和位置x后,可以先由基本公式1计算出n的值,再将n的值代入基本公式2得出dx,最后通过基本公式3计算出两个轨迹点之间的加速度am;
[0038]
s2-2-2、计算样本车辆i在通过下游真实停止线之前完整经历了多少个轨迹点:通过对位置关系的限制来确定轨迹点的个数p。
[0039]
考虑到加速度对车辆尾气排放影响较大,本发明方法摒弃了恒定加速度的假设,基于newell关键交通流基本理论,对加速阶段进行细分,更加精确地估算了不同车辆在不同加速阶段的加速度大小,使加速度更加贴近于真实情况。
[0040]
进一步地,所述步骤s2-4,已知样本车辆i通过上游虚拟停止线时的时间戳位置x
up
和结束空转状态开始加速状态时所处的位置根据距离差,即并且假设车辆减速速度为已知量dc,车辆的巡航速率为已知量vf,由此计算出样本车辆i在减速状态前经历的巡航位移和时长以及经历减速状态的时长进而获得样本车辆i结束减速状态开始空转状态的时空信息,记为其中,为样本车辆i结束减速状态开始空转状态的时刻,为样本车辆i结束减速状态开始空转状态的位置;具体计算公式如下:
[0041][0042][0043][0044][0045]
本发明方法假设所有车辆巡航速率(vf)为已知常数,获取方式包括但不限于高德交通态势数据、该周期内巡航车辆的平均速度、宏观交通流模型计算平均巡航速度等。
[0046]
进一步地,所述时间调整量t
ad
的确定方法具体包括步骤:
[0047]
s2-2-1、获取样本车辆i中各个轨迹点之间的加速度:通过先计算两个轨迹点的速度,再确定此两个轨迹点之间的加速度的方法来获取样本车辆i中各个轨迹点之间的加速度;具体为:
[0048]
已知下游真实停止线的位置x
down
,简记为d;再基于样本车辆时间戳数据信息,将任一样本车辆通过下游真实停止线的时间戳记为t
arr
(这里的t
arr
与样本车辆i通过下游真实停止线的时间戳的区别与联系:二者同义,但t
arr
泛指所有样本车辆,带有编号i,特指某一样本车辆),则在车辆轨迹的位置-时间关系图象中该样本车辆通过下游真实停止线的坐标记为(t
arr
,d);现假设该样本车辆经过的时间调整量t
ad
是一个未知参数τ,显然经调整后该样本车辆到达下游真实停止线的时空信息表示为(t
arr-τ,d);然后过点(t
arr-τ,d)且以巡航速率vf为斜率画一条直线,所画直线与交通流消散波相交于第一个轨迹点,即为该样本车辆结束空转状态开始加速状态的时空信息,记为[t1(τ),d1(τ)],且交通流消散波的
速率为vd,则有:
[0049][0050][0051]
当该样本车辆处于第一个轨迹点[t1(τ),d1(τ)]时,显然此时该样本车辆的瞬时速度为0,将其代入与速度v相关的已知量h(v)、h
′
(v)中可得到h(v=0)、h
′
(v=0),结合已知量z,则可以得到该样本车辆从第一个轨迹点至第二个轨迹点的车辆位移dx1(τ),满足关系式:
[0052][0053]
因此,该样本车辆从第一个轨迹点至第二个轨迹点之间的加速度a1(τ),满足关系式:
[0054][0055]
该样本车辆在第二个轨迹点的坐标可记为[t2(τ),d2(τ)],满足关系式:
[0056][0057]
d2(τ)=d1(τ)+dxi(τ);
[0058]
该样本车辆从第二个轨迹点至第三个轨迹点之间的车辆位移dx2(τ)和加速度a2(τ)可表示为:
[0059][0060][0061]
该样本车辆在第三个轨迹点的坐标可记为[t3(τ),d3(τ)],满足关系式:
[0062][0063]
d3(τ)=d2(τ)+dx2(τ);
[0064]
该样本车辆从第三个轨迹点至第四个轨迹点之间的车辆位移dx3(τ)和加速度a3(τ)可表示为:
[0065][0066][0067]
以此类推,对于该样本车辆的轨迹点k=2,3,
…
,p,满足递归方程:
[0068][0069]dk
(τ)=d
k-1
(τ)+dx
k-1
(τ),
[0070]
[0071][0072]
s2-2-2、计算样本车辆i在通过下游真实停止线之前完整经历了多少个轨迹点:通过对位置关系的限制来确定轨迹点的个数p;具体为:
[0073][0074]
对于每个p的可行解,如果相应解得的τ为非负集合,则说明此解可能是该样本车辆的轨迹点个数,只当此解同时满足以下两个公式时才能保证τ有唯一可行解;所述两个公式如下:
[0075][0076][0077]
当满足τ有唯一可行解时,认为此时τ的解就是时间调整量t
ad
的值;
[0078]
但是,若代入p的所有整数值都不可行或者不存在τ的可行解,则可能是该样本车辆在经过第二个轨迹点之前已经通过了下游真实停止线,记为情况一;也可能是该样本车辆在通过下游真实停止线之前已经进入了再巡航状态,记为情况二;针对情况一,很显然轨迹点个数为1;针对情况二,判别式切换到方程式,得:
[0079][0080]
由于时间调整量t
ad
会影响样本车辆开始加速的时间和位置,进而影响冲击波边界的估计。因此,本发明方法针对时间调整量t
ad
进行解析计算,具体车辆具体分析,不再采用某一统一参数作为时间调整量,采用该方法能够使重构的样本车辆轨迹尽可能地接近真实情况,即能够使车辆通过下游真实停止线的时间更接近真实时间戳
[0081]
进一步地,所述步骤s3-4,根据步骤s2的方法逆推得到非样本车辆j通过上游虚拟停止线及下游真实停止线的时间戳,分别记为具体包括:
[0082]
s3-4-1、在确定了非样本车辆j结束空转状态开始加速状态的时空信息与结束减速状态开始空转状态的时空信息后,通过上游虚拟停止线的位置x
up
和非样本车辆j结束空转状态开始加速状态时所处的位置根据距离差, 即以及假设车辆的减速速度为已知量dc、巡航速率为已知量vf,由此计算出非样本车辆j在减速状态前经历的巡航位移和时长以及经历减速状态的时长进而获得非样本车辆j通过上游虚拟停止线的时间戳,记为其中,为非样本车辆j结束空转状态开始加速状态的时刻,为非样本车辆j结束空转状态开始加速状态的位置,为非样本车辆j结束减速状态开始空转状态的时刻,为非样本车辆j结束减速状态开始空转状态的位置;具体计算公式如下:
[0083]
[0084][0085]
s3-4-2、获取非样本车辆j中各个轨迹点之间的加速度:通过先计算两个轨迹点的速度,再确定此两个轨迹点之间的加速度的方法来获取非样本车辆j中各个轨迹点之间的加速度;具体为:
[0086]
根据非样本车辆j结束空转状态开始加速状态的时空信息为这里可将任一非样本车辆结束空转状态开始加速状态的时空信息作为该非样本车辆的第一个轨迹点,记为[t1,d1];
[0087]
当该非样本车辆处于第一个轨迹点[t1,d1]时,显然此时该非样本车辆的瞬时速度为0,将其代入与速度v相关的已知量h(v)、h
′
(v)中可得到h(v=0)、h
′
(v=0),结合已知量z,则可以得到该非样本车辆从第一个轨迹点至第二个轨迹点的车辆位移dx1,满足关系式:
[0088][0089]
因此,该非样本车辆从第一个轨迹点至第二个轨迹点之间的加速度a1,满足关系式:
[0090][0091]
该非样本车辆在第二个轨迹点的坐标可记为[t2,d2],满足关系式:
[0092][0093]
d2=d1+dxi;
[0094]
该非样本车辆从第二个轨迹点至第三个轨迹点之间的车辆位移dx2和加速度a2可表示为:
[0095][0096][0097]
该非样本车辆在第三个轨迹点的坐标可记为[t3,d3],满足关系式:
[0098][0099]
d3=d2+dx2;
[0100]
该非样本车辆从第三个轨迹点至第四个轨迹点之间的车辆位移dx3和加速度a3可表示为:
[0101][0102][0103]
以此类推,对于该非样本车辆的轨迹点k=2,3,
…
,p,满足递归方程:
[0104][0105]dk
=d
k-1
+dx
k-1
,
[0106][0107][0108]
多数研究表明,车辆尾气排放不受减速度的影响或只受到轻微影响。因此,本发明假设所有车辆减速速度(dc)为已知常数,简化计算。获取方法包括但不限于由地面真实值取平均值校准产生。
[0109]
进一步地,所述样本车辆时间戳数据信息的获取可以从一种或多种混合交通数据源中获取,所述交通数据源包括车辆gps定位数据、线圈数据、交通卡口数据。
[0110]
进一步地,所述流率q
l
的取值获取方法包括从历史车辆轨迹数据中校准获取。
[0111]
进一步地,所述点a的时空信息的获取方法包括从车辆gps定位数据或交通卡口数据中提取出一天中该信号干道上多个交通信号周期内的最大排队车辆长度及最后一辆排队车辆结束减速状态开始空转状态的时间戳,并计算其相应的平均值作为点a的输入值。
[0112]
进一步地,所述dv取定值为1.2m/s;所述h(v)、h
′
(v)、z这三个量的获取方法包括从历史车辆轨迹数据中校准获取。
[0113]
根据研究表明,dv取定值为1.2m/s时重构加速度最为贴近于地面真实值。
[0114]
下面通过具体实施方式及附图对本发明作进一步详细说明,但并不意味着对本发明保护范围的限制。
附图说明
[0115]
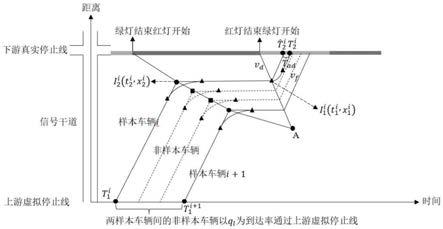
图1是本发明实施例中信号路口机动车排队车辆轨迹重构示意图。
具体实施方式
[0116]
下面结合附图,通过对实施例的描述,对本发明的具体实施方式作进一步的说明。
[0117]
实施例
[0118]
本例给出的一种信号路口机动车排队车辆轨迹重构方法,其示意图如图1所示,该方法包括步骤:
[0119]
s1、规定信号干道上,排队车辆依次经历的驾驶状态包括:巡航、减速、空转、加速、再巡航,并且所有排队车辆均在一个交通信号周期内通过下游真实停止线(即不考虑车辆过饱和的情况);从任一交通信号周期中红灯结束绿灯开始时刻,排队车辆以交通流消散波的速率开始消散,即:所有排队车辆不在同一时刻由空转状态转变为加速状态,所有排队车辆开始消散的时刻分布在车辆轨迹的位置-时间关系图象中的交通流消散波上;将上游虚拟停止线及下游真实停止线的位置分别记为x
up
、x
down
,所述上游虚拟停止线是指所要重构的排队车辆轨迹的起始位置,所述下游真实停止线是指所要重构的排队车辆轨迹的结束位置;将排队车辆分为样本车辆和非样本车辆,所述样本车辆是指有被采集到车辆时间戳数据信息的排队车辆,所述非样本车辆是指没有被采集到车辆时间戳数据信息但真实存在的排队车辆;
[0120]
(补充说明:交通流消散波指的是绿灯开始后,车辆消散的波;交通流冲击波指的是红灯开始后,车辆开始排队的冲击波。两者都是由周期内第一辆排队车辆传递到下一辆排队车辆直至最后一辆排队车辆,由于交通流的消散波速率与冲击波速率相比通常非常稳定,因此本发明中将消散波速率视作恒定值,而冲击波速率由相邻两辆样本车辆所决定。交通信号周期时长信息已知,包括红灯时长、绿灯时长。)
[0121]
s2、重构任一交通信号周期内样本车辆的轨迹,包括根据样本车辆时间戳数据信息确定该交通信号周期内的交通流冲击波边界,具体为:
[0122]
s2-1、获取样本车辆i通过上游虚拟停止线及下游真实停止线的时间戳,分别记为
[0123]
s2-2、规定一时间调整量t
ad
,记样本车辆i经调整后通过下游真实停止线的时间为且满足(每个样本车辆对应的时间调整量t
ad
可能不同。)
[0124]
s2-3、已知样本车辆i经调整后通过下游真实停止线的时间为并且假设在红灯结束绿灯开始后样本车辆i以全巡航状态通过下游真实停止线(真实情况应该是先加速再达到巡航,由此造成的时间误差已考虑进时间调整量t
ad
中),根据车辆轨迹的位置-时间关系图象中的几何关系,将交通流消散波与样本车辆i的巡航轨迹(再巡航轨迹)的交点确定为样本车辆i结束空转状态开始加速状态的时空信息,记为其中,为样本车辆i结束空转状态开始加速状态的时刻,为样本车辆i结束空转状态开始加速状态的位置;(即:从该交通信号周期中红灯结束绿灯开始的时刻点出发,画一条以交通流消散波的速率(记为vd)为斜率的直线,则交通流消散波在该直线上;从点出发,画一条以巡航速率(记为vf)为斜率的直线,与交通流消散波相交于点该点的物理意义即为样本车辆i结束空转状态开始加速状态的时空信息。)
[0125]
(补充说明:由于该轨迹重构方法的步骤为先假设排队车辆在上游虚拟停止线和下游真实停止线之间的行驶状态为“巡航-空转-再巡航”,以确定“空转”状态结束的时空信息,再分别添加“空转”状态开始前的“减速”状态、“空转”状态结束后的“加速”状态,所以步骤s2-3中的“巡航轨迹”是指“再巡航轨迹”。)
[0126]
s2-4、已知样本车辆i通过上游虚拟停止线时的时间戳位置x
up
和结束空转状态开始加速状态时所处的位置根据距离差,即并且假设车辆减速速度为已知量dc,车辆的巡航速率为已知量vf,由此计算出样本车辆i在减速状态前经历的巡航位移和时长以及经历减速状态的时长进而获得样本车辆i结束减速状态开始空转状态的时空信息,记为其中,为样本车辆i结束减速状态开始空转状态的时刻,为样本车辆i结束减速状态开始空转状态的位置;
[0127]
s2-5、引入点a以区分排队车辆与自由流车辆(非排队车辆);(由于样本车辆的渗透率通常无法达到100%,所以通常无法直接确定一个周期内的最后一辆样本车辆是否就是一个周期内所有排队车辆中的最后一辆,因此引入点a以区分排队车辆与自由流车辆。)
[0128]
s2-6、在车辆轨迹的位置-时间关系图象中,将与点a用直线连接,即可得到该交通信号周期内的交通流冲击波边界;
[0129]
s3、重构该交通信号周期内非样本车辆的轨迹,具体包括:
[0130]
s3-1、假设两个连续样本车辆之间的非样本车辆在开始加速时所处的位置坐标均匀分布在此两个连续样本车辆之间,即均匀分布在所述交通流消散波上,由此确定出非样本车辆j结束空转状态开始加速状态的时空信息,记为其中,为非样本车辆j结束空转状态开始加速状态的时刻,为非样本车辆j结束空转状态开始加速状态的位置;假设两个连续样本车辆之间的非样本车辆在开始空转时所处的位置坐标均匀分布在此两个连续样本车辆之间,即均匀分布在所述该交通信号周期内的交通流冲击波边界上,由此确定出非样本车辆j结束减速状态开始空转状态的时空信息,记为其中,为非样本车辆j结束减速状态开始空转状态的时刻,为非样本车辆j结束减速状态开始空转状态的位置;
[0131]
s3-2、记两个连续样本车辆为样本车辆i和样本车辆i+1,估计此两个连续样本车辆之间的非样本车辆数n
l
,具体为:
[0132][0133]
其中,q
l
代表流率,不同的相邻样本车辆之间的流率可能不同;(即:两个连续样本车辆间的非样本车辆以q
l
为到达率通过上游虚拟停止线。)
[0134]
s3-3、确定与的具体时空信息,具体为:
[0135]
对与构成的冲击波边界线段与消散波线段分别进行(n
l
+1)等分,得:
[0136][0137]
其中,为样本车辆i结束空转状态开始加速状态的时空信息,为样本车辆i+1结束空转状态开始加速状态的时空信息,为样本车辆i结束减速状态开始空转状态的时空信息,为样本车辆i+1结束减速状态开始空转状态的时空信息;
[0138]
s3-4、根据步骤s2的方法逆推得到非样本车辆j通过上游虚拟停止线及下游真实停止线的时间戳,分别记为
[0139]
本例所述时间调整量t
ad
的确定方法包括步骤:
[0140]
s2-2-1、获取样本车辆i中各个轨迹点之间的加速度:通过先计算两个轨迹点的速度,再确定此两个轨迹点之间的加速度的方法来获取样本车辆i中各个轨迹点之间的加速度;计算所涉及的基本公式如下:
[0141]
基本公式1:x=h(v)n+z;
[0142]
基本公式2:
[0143]
基本公式3:
[0144]
上述基本公式1、基本公式2和基本公式3中,n表示从某个参考车辆通过开始,到时间t之前通过某个位置x的车辆累计数量;dv取定值;h(v)、h
′
(v)均为与速度v相关的已知量,z是已知量;n与x是线性相关的,用基本公式1表示;由基本公式1求导得出基本公式2,这意味着位置的变化量dx与n也是线性相关的;因此,在给出车辆某时刻的速度v和位置x后,可以先由基本公式1计算出n的值,再将n的值代入基本公式2得出dx,最后通过基本公式3计算出两个轨迹点之间的加速度am;
[0145]
具体为:
[0146]
已知下游真实停止线的位置x
down
,简记为d;再基于样本车辆时间戳数据信息,将任一样本车辆通过下游真实停止线的时间戳记为t
arr
(这里的t
arr
与样本车辆i通过下游真实停止线的时间戳的区别与联系:二者同义,但t
arr
泛指所有样本车辆,带有编号i,特指某一样本车辆),则在车辆轨迹的位置-时间关系图象中该样本车辆通过下游真实停止线的坐标记为(t
arr
,d);现假设该样本车辆经过的时间调整量t
ad
是一个未知参数τ,显然经调整后该样本车辆到达下游真实停止线的时空信息表示为(t
arr-τ,d);然后过点(t
arr-τ,d)且以巡航速率vf为斜率画一条直线,所画直线与交通流消散波相交于第一个轨迹点,即为该样本车辆结束空转状态开始加速状态的时空信息,记为[t1(τ),d1(τ)],且交通流消散波的速率为vd,则有:
[0147][0148][0149]
当该样本车辆处于第一个轨迹点[t1(τ),d1(τ)]时,显然此时该样本车辆的瞬时速度为0,将其代入与速度v相关的已知量h(v)、h
′
(v)中可得到h(v=0)、h
′
(v=0),结合已知量z,则可以得到该样本车辆从第一个轨迹点至第二个轨迹点的车辆位移dx1(τ),满足关系式:
[0150][0151]
因此,该样本车辆从第一个轨迹点至第二个轨迹点之间的加速度a1(τ),满足关系式:
[0152][0153]
该样本车辆在第二个轨迹点的坐标可记为[t2(τ),d2(τ)],满足关系式:
[0154][0155]
d2(τ)=d1(τ)+dxi(τ);
[0156]
该样本车辆从第二个轨迹点至第三个轨迹点之间的车辆位移dx2(τ)和加速度a2(τ)可表示为:
[0157]
[0158][0159]
该样本车辆在第三个轨迹点的坐标可记为[t3(τ),d3(τ)],满足关系式:
[0160][0161]
d3(τ)=d2(τ)+dx2(τ);
[0162]
该样本车辆从第三个轨迹点至第四个轨迹点之间的车辆位移dx3(τ)和加速度a3(τ)可表示为:
[0163][0164][0165]
以此类推,对于该样本车辆的轨迹点k=2,3,
…
,p,满足递归方程:
[0166][0167]dk
(τ)=d
k-1
(τ)+dx
k-1
(τ),
[0168][0169][0170]
s2-2-2、计算样本车辆i在通过下游真实停止线之前完整经历了多少个轨迹点:通过对位置关系的限制来确定轨迹点的个数p;具体为:
[0171][0172]
对于每个p的可行解,如果相应解得的τ为非负集合,则说明此解可能是该样本车辆的轨迹点个数,只当此解同时满足以下两个公式时才能保证τ有唯一可行解;所述两个公式如下:
[0173][0174][0175]
当满足τ有唯一可行解时,认为此时τ的解就是时间调整量t
ad
的值;
[0176]
但是,若代入p的所有整数值都不可行或者不存在τ的可行解,则可能是该样本车辆在经过第二个轨迹点之前已经通过了下游真实停止线,记为情况一;也可能是该样本车辆在通过下游真实停止线之前已经进入了再巡航状态,记为情况二;针对情况一,很显然轨迹点个数为1;针对情况二,判别式切换到方程式,得:
[0177][0178]
本例所述步骤s2-4,已知样本车辆i通过上游虚拟停止线时的时间戳位置x
up
和结束空转状态开始加速状态时所处的位置根据距离差,即并且假设车辆减速速度为已知量dc,车辆的巡航速率为已知量vf,由此计算出样本车辆i在减速状态前经历的
巡航位移和时长以及经历减速状态的时长进而获得样本车辆i结束减速状态开始空转状态的时空信息,记为其中,为样本车辆i结束减速状态开始空转状态的时刻,为样本车辆i结束减速状态开始空转状态的位置;具体计算公式如下:
[0179][0180][0181][0182][0183]
本例假设所有车辆巡航速率(vf)为已知常数,获取方式包括但不限于高德交通态势数据、该周期内巡航车辆的平均速度、宏观交通流模型计算平均巡航速度等。
[0184]
本例所述步骤s3-4,根据步骤s2的方法逆推得到非样本车辆j通过上游虚拟停止线及下游真实停止线的时间戳,分别记为具体包括:
[0185]
s3-4-1、在确定了非样本车辆j结束空转状态开始加速状态的时空信息与结束减速状态开始空转状态的时空信息后,通过上游虚拟停止线的位置x
up
和非样本车辆j结束空转状态开始加速状态时所处的位置根据距离差,即以及假设车辆的减速速度为已知量dc、巡航速率为已知量vf,由此计算出非样本车辆j在减速状态前经历的巡航位移和时长以及经历减速状态的时长进而获得非样本车辆j通过上游虚拟停止线的时间戳,记为其中,为非样本车辆j结束空转状态开始加速状态的时刻,为非样本车辆j结束空转状态开始加速状态的位置,为非样本车辆j结束减速状态开始空转状态的时刻,为非样本车辆j结束减速状态开始空转状态的位置;具体计算公式如下:
[0186][0187][0188][0189]
s3-4-2、获取非样本车辆j中各个轨迹点之间的加速度:通过先计算两个轨迹点的速度,再确定此两个轨迹点之间的加速度的方法来获取非样本车辆j中各个轨迹点之间的加速度;具体为:
[0190]
根据非样本车辆j结束空转状态开始加速状态的时空信息为这里可将任
一非样本车辆结束空转状态开始加速状态的时空信息作为该非样本车辆的第一个轨迹点,记为[t1,d1];
[0191]
当该非样本车辆处于第一个轨迹点[t1,d1]时,显然此时该非样本车辆的瞬时速度为0,将其代入与速度v相关的已知量h(v)、h
′
(v)中可得到h(v=0)、h
′
(v=0),结合已知量z,则可以得到该非样本车辆从第一个轨迹点至第二个轨迹点的车辆位移dx1,满足关系式:
[0192][0193]
因此,该非样本车辆从第一个轨迹点至第二个轨迹点之间的加速度a1,满足关系式:
[0194][0195]
该非样本车辆在第二个轨迹点的坐标可记为[t2,d2],满足关系式:
[0196][0197]
d2=d1+dxi;
[0198]
该非样本车辆从第二个轨迹点至第三个轨迹点之间的车辆位移dx2和加速度a2可表示为:
[0199][0200][0201]
该非样本车辆在第三个轨迹点的坐标可记为[t3,d3],满足关系式:
[0202][0203]
d3=d2+dx2;
[0204]
该非样本车辆从第三个轨迹点至第四个轨迹点之间的车辆位移dx3和加速度a3可表示为:
[0205][0206][0207]
以此类推,对于该非样本车辆的轨迹点k=2,3,
…
,p,满足递归方程:
[0208][0209]dk
=d
k-1
+dx
k-1
,
[0210][0211][0212]
多数研究表明,车辆尾气排放不受减速度的影响或只受到轻微影响。因此,本发明假设所有车辆减速速度(dc)为已知常数,简化计算。获取方法包括但不限于由地面真实值取平均值校准产生。
[0213]
本例所述样本车辆时间戳数据信息的获取可以从一种或多种混合交通数据源中获取,所述交通数据源包括车辆gps定位数据、线圈数据、交通卡口数据。
[0214]
本例所述流率q
l
的取值获取方法包括从历史车辆轨迹数据中校准获取。
[0215]
本例所述点a的时空信息的获取方法包括从车辆gps定位数据或交通卡口数据中提取出一天中该信号干道上多个交通信号周期内的最大排队车辆长度及最后一辆排队车辆结束减速状态开始空转状态的时间戳,并计算其相应的平均值作为点a的输入值。
[0216]
本例所述dv取定值为1.2m/s;所述h(v)、h
′
(v)、z这三个量的获取方法包括从历史车辆轨迹数据中校准获取。根据研究表明,dv取定值为1.2m/s时重构加速度最为贴近于地面真实值。
[0217]
上述结合附图对本发明进行了示例性描述,显然本发明的具体实现并不受本文所示的实施例限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1