基于警示柱的多维精准电网用警示方法与流程
1.本发明属于配电管理技术领域,具体涉及为基于警示柱的多维精准电网用警示方法。
背景技术:
2.现有的配电用警示柱,大多只有国家电网的标志和类似“下有电缆严禁开挖”字样,无法起到主动警示的作用。基于此问题,人们设计了多种智能警示柱方案,大都是安装监控设备和声光报警装置,起到了一定的效果,但仍存在一定的问题。首先,大多的智能警示柱不能精准地分辨需要警示的具体目标并对其进行警示,会对周遭的无风险目标造成影响。其次,在对噪音较为敏感的室内和室外环境,声音报警装置就不适用。另外,出于成本因素和节约空间的考虑,大多智能警示柱的高度都有限制,光学报警手段多为散射光源,无法对乘驾交通工具而视线较高的目标进行警示;同时,由于智能手机的普及,一些行人在行走时也会被手机所吸引,视线无法察觉光学报警源。
技术实现要素:
3.本发明要解决的技术问题是:克服现有技术的不足,提供基于警示柱的多维精准电网用警示方法。
4.本发明解决现有技术存在的问题所采用的技术方案是:
5.本发明提供了基于警示柱的多维精准电网用警示方法,基于一种智能警示柱,智能警示柱包括柱体和设于柱体底部的基座,所述柱体内部设置有安装腔,所述安装腔贯穿所述柱体的底部端面并和所述基座的内腔相连通,柱体外侧上下依次设置有环境监测模块和光汽警示装置,所述安装腔内设置有控制终端,所述基座内腔中设置有高压汽源;
6.所述环境监测模块包括旋转设置于所述柱体上的智能监控组件,所述光汽警示装置旋转设置于所述柱体上,且所述光汽警示装置包括第二环形导轨和至少一个光汽联动装置,所述第二环形导轨套设于所述柱体上并通过连接块与所述柱体外壁固定连接,所述第二环形导轨上移动设置有与所述光汽联动装置数量相同的电动滑块,所述光汽联动装置固定于所述电动滑块上且其包括可沿竖直平面同步旋转的喷射枪和集束光源,所述高压气源包括导管连接的气泵和雾化加湿装置,所述雾化加湿装置和所述喷射枪通过导管连接,所述控制终端和所述环境监测模块、光汽警示装置、高压气源电气连接;
7.所述警示方法的具体步骤如下:
8.s101:所述智能监控组件实时监控柱体周边的行人或动物,并对进入预设警戒范围的行人或动物的运动轨迹进行识别和预测,判断是否有行人或动物将侵入警示区域,若有则将目标识别信息、目标的位置信息、目标的面部高度信息结合生成的目标信息实时传输至所述控制终端,所述控制终端接收目标信息并将目标加入目标集合;
9.s102:所述控制终端对目标集合进行检索,判断集合中是否存在至少一个目标,若存在,则跳转到步骤s103,若不存在,则跳转到步骤s101;
10.s103:所述控制终端根据目标的实时位置信息对目标集合中的各个目标与各个光汽联动装置绑定,生成目标和光汽联动装置的映射关系,一个光汽联动装置可绑定多个目标;
11.s104:所述控制终端根据所述映射关系控制所述光汽警示装置,使各个光汽联动装置在所述第二环形导轨上移动并对其绑定的各个目标进行警示,警示的具体方法如下:首先控制所述集束光源和喷射枪指向目标的面部,再控制所述集束光源发出脉冲式警示光线以提醒目标,同时控制所述喷射枪将加湿后的水汽喷向目标面部;
12.s105:所述智能监控组件跟踪目标并对各个目标受到警示后的运动轨迹进行识别,判断各个目标的运动轨迹是否远离警示区域,若是,则将远离的目标从目标集合中删除,跳转到步骤s102。
13.优选地,所述智能监控组件包括环形电动导轨和至少一个智能识别摄像头,所述环形电动导轨上移动安装有与所述智能识别摄像头数量相同的滑块座,所述智能识别摄像头固定连接于所述滑块座;所述柱体上部外周开设有环形的安装槽,所述环形电动导轨固定设置于所述安装槽;
14.所述环境监测模块还包括传感器组件,所述传感器组件包括固定设置于所述柱体侧壁上的温湿度传感器、风速计、红外感应传感器。
15.优选地,所述光汽联动装置还包括垂直设置于所述电动滑块上的两个分离的弧形支撑块,两个弧形支撑块之间旋转设置有旋转轴,所述旋转轴贯穿其中一个弧形支撑块的侧壁且其末端设置有旋转电机,所述旋转电机固定设置于所述电动滑块上且所述旋转电机的输出轴与所述旋转轴连接,所述旋转轴上连接有固定块,所述喷射枪和所述集束光源固定设置于所述固定块上。
16.优选地,所述光汽联动装置还包括垂直设置于所述电动滑块上的两个分离的弧形支撑块,所述两个弧形支撑块之间旋转设置有旋转轴,所述旋转轴贯穿其中一个弧形支撑块的侧壁且其末端设置有旋转电机,所述旋转电机固定设置于所述电动滑块上且所述旋转电机的输出轴与所述旋转轴连接,所述旋转轴上连接有固定块,所述喷射枪和所述集束光源固定设置于所述固定块上。
17.优选地,所述雾化加湿装置包括加湿模块、调温模块,所述加湿模块用于对气泵传输的气体进行加湿,所述调温模块用于对加湿后的水汽进行冷却或加热,所述加湿模块的加湿工质里掺设有香味剂。
18.优选地,所述步骤s101中,所述智能监控组件初始处于休眠状态,所述环境监测模块中的红外感应传感器实时监测是否有人进入所述柱体周边的警戒范围,当有人物进入时,所述智能监控组件启动开始监控柱体周边的行人物并进行智能识别;当所述红外感应传感器监测到所述警戒范围内无人或动物存在时,所述控制终端控制所述智能监控组件休眠;
19.所述控制终端根据所述温湿度传感器监测到的外部温湿度信息实时控制所述雾化加湿装置对导管中的气体进行预处理,实时保持导管中的气体温湿度与外部气体的温湿度差异较大,以使所述喷射枪喷射水汽的操作对目标的提醒效果更为明显。
20.优选地,所述基于警示柱的多维精准电网用警示方法还包括所述控制终端控制所述光汽警示装置中的各个喷射枪向周围周期性地喷射水汽,以优化周边环境并形成与外界
差异性较大的加湿区域以提醒进入所述加湿区域的行人;
21.所述控制终端周期性地控制各个喷射枪喷射柱体以进行自清洁。
22.优选地,所述柱体内部还开设有贯穿所述柱体的顶部端面的悬浮滑槽,所述柱体顶部设置有悬浮装置,所述安装腔内还设置有与控制终端电气连接的移动磁力底座;所述悬浮装置插设于所述悬浮滑槽内且其内部设置有永磁体,其包括上下连接的卡座和棱柱,所述棱柱插设于所述悬浮滑槽内,所述悬浮滑槽与所述棱柱适配,所述卡座卡接于所述柱体顶部,所述永磁体嵌设于所述卡座或棱柱的内部,所述棱柱的侧壁间隔设置有荧光涂层和反光涂层;所述移动磁力底座包括升降机构、支撑板、电磁铁,所述升降机构竖直固定于所述安装腔的内壁,所述支撑板与所述升降机构的升降部固定连接,所述电磁铁设置于所述支撑板上,所述永磁体和所述电磁铁的同性磁极相对。
23.优选地,所述棱柱为透明材质且为上宽下窄的锥形结构,所述卡座的底部设置有弧形的第一凹槽,所述第一凹槽的侧壁设置有反射涂层,所述第一凹槽内固定设置有透明连接块,所述透明连接块的底部端面和所述卡座的底部端面平齐,所述棱柱连接于所述透明连接块;所述柱体的顶部设置有第二凹槽,所述第二凹槽的侧壁设置有反射涂层,所述第二凹槽内固定设置有第二透明块,所述第二透明块的底部端面和所述柱体的顶部端面平齐,所述悬浮滑槽贯穿所述第二透明块;所述电磁铁为多个且绕所述支撑板的中心环形分布,所述支撑板的中心垂直向上设置有第二集束光源。
24.优选地,所述警示方法还包括对处于密闭驾驶空间的驾驶员的警示方法,具体步骤如下:
25.s201:所述控制终端控制所述电磁铁通电,并控制所述升降机构带动电磁铁向上运动,所述电磁铁通过磁力推动所述悬浮装置向上运动,并最终悬浮于所述柱体的顶部;
26.s202:所述控制终端控制所述第二集束光源通电并照射向所述悬浮装置,并在所述卡座底部和所述柱体顶部的反射层作用下,使光线聚集于所述卡座和所述柱体顶部之间的空间;
27.s203:所述控制终端控制所述升降机构带动电磁铁向下运动,进而带动所述悬浮装置向下运动,并最终插设于所述悬浮滑槽内,所述控制终端控制所述电磁铁、第二集束光源断电。
28.与现有技术相比,本发明所具有的有益效果:
29.(1)通过智能监控技术,识别周边人物的运动轨迹,精准识别警示目标,并通过集束光源和喷射枪对目标进行警示,排除了对无风险对象的影响。
30.(2)通过集束光源和喷射枪主动警示,克服了传统声光警示警示效果不好和噪音污染的缺陷。
31.(3)通过磁悬浮技术,将悬浮反射装置悬浮在警示柱上方,克服了警示柱本身高度的限制,在不占用空间的情况下对视线较高的目标进行警示,也是对光汽混合警示手段无法警示驾驶舱内人员的一个补充。
附图说明
32.下面结合附图和实施例对本发明进一步说明。
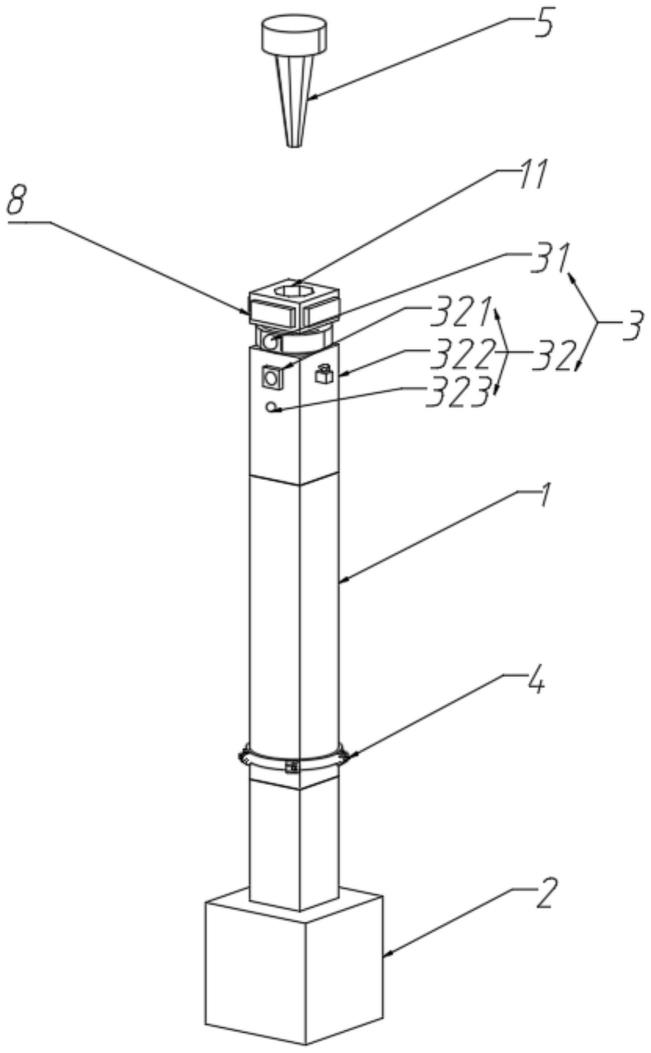
33.图1为本发明整体结构示意图,
34.图2为本发明整体剖切示意图,
35.图3为本发明智能监控组件结构示意图,
36.图4为本发明光汽混合警示装置结构示意图,
37.图5为本发明光汽混合警示装置局部放大示意图,
38.图6为本发明移动磁力底座结构示意图,
39.图7为本发明局部放大示意图,
40.图8为本发明方法流程图一,
41.图9为本发明方法流程图二。
42.图中:
43.1、柱体,2、基座,3、环境监测模块,4、光汽混合警示装置,5、悬浮装置,6、移动磁力底座,7、控制终端,8、高压汽源,9、led闪光灯,11、悬浮滑槽,12、安装腔,13、第二透明块,21、加料口,31、智能监控组件,32、传感器模块,41、第二环形导轨,42、电动滑块,43、光汽联动装置,44、连接块,51、卡座,52、棱柱,53、永磁体,54、透明连接块,61、升降机构,62、支撑板,63、电磁铁,64、第二集束光源,81、气泵,82、雾化加湿装置,311、智能识别摄像头,312、环形电动导轨,3121、滑块座,431、弧形支撑块,432、固定块,433、集束光源,434、喷射枪,435、旋转电机。
具体实施方式
44.为使本发明的技术方案和有益效果更加清楚,下面对本发明的实施方式做进一步的详细解释。
45.如图1至图8所示,本发明提供了基于环境感知的光汽混合智能警示柱,包括柱体 1和设于柱体1底部的基座2,所述柱体1和基座2皆为中空结构,所述柱体1内部由上至下依次设置有相互贯通的悬浮滑槽11和安装腔12,所述悬浮滑槽11贯穿所述柱体1的顶部端面,所述安装腔12贯穿所述柱体1的底部端面并和所述基座2的内腔相连通,所述安装腔12的横截面大于所述悬浮滑槽11的横截面。
46.所述柱体1外侧上下依次设置有环境监测模块3和光汽警示装置4,所述柱体1顶部设置有悬浮装置5;所述安装腔12内设置有移动磁力底座6和控制终端7,所述基座 2内腔中设置有高压汽源8。所述控制终端7为计算机设备。
47.所述控制终端7和所述环境监测模块3、光汽警示装置4、移动磁力底座6、高压汽源8电气连接,所述环境监测模块3用于监控识别周边人物并采集周边环境参数,所述控制终端7通过所述人物的运动轨迹和周边环境参数以确定警示目标和选取警示方式,所述光汽警示装置4和高压汽源8配合通过光照和喷射水汽对目标进行提醒,所述移动磁力底座6用于通过磁力推动所述悬浮装置5悬浮于所述柱体1上方以提醒目标。
48.所述环境监测模块3包括智能监控组件31和传感器组件32,所述智能监控组件31 旋转设置于所述柱体1上,所述传感器组件32包括固定设置于所述柱体1侧壁上的温湿度传感器321、风速计322、红外感应传感器323。所述温湿度传感器321用于检测外部空气温湿度以便对喷射气体的温湿度进行调节以提高警示效果,所述风速计322用于检测外部风速,防止所述悬浮装置5升起后受风力影响掉落到所述柱体1外部,所述红外感应传感器323用于检测柱体1周边是否有人或动物靠近。
49.所述智能监控组件31包括环形电动导轨312和至少一个智能识别摄像头311,所述环形电动导轨312上移动安装有与所述智能识别摄像头311数量相同的滑块座3121,所述智能识别摄像头311固定连接于所述滑块座3121;所述柱体1上部外周开设有环形的安装槽,所述环形电动导轨312固定设置于所述安装槽。所述环形电动导轨312带动所述滑块座3121移动,进而带动所述智能识别摄像头沿柱体1环形运动以对周边人物进行监控并智能识别。所述环形电动导轨312为现有技术,其具体结构此处不再赘述。
50.智能监控(intelligent surveillance)是嵌入式视频服务器中,集成了智能行为识别算法,能够对画面场景中的人或车辆的行为进行识别、判断,并在适当的条件下,产生报警提示用户。本发明应用的识别类型包括:
51.物体识别:能区分出移动物体的类别和行为,是轿车,还是摩托车、还是人、还是飞机等等,同时还能判断移动物体是行走、倒下、速度或其他,这是其他识别的基础。
52.越界识别:在视频画面上人为的画一道线或曲线,可以识别出物体穿越此界限的行为。比如视野是个马路上,画一条线把道路分成两端,假设定义了从左到右是合法,从右到左为非法,一旦车辆行驶跨越了这个界线,设备判断其是否非法,非法则产生报警。
53.轨迹跟踪:识别处移动物体之后,能在移动的元素后面画出其运动经过场所的轨迹,并能根据已有轨迹预测计算接下来的轨迹。
54.所述智能识别摄像头即为在集成于自身内嵌入式视频服务器中加入各种智能识别算法。现有的智能摄像头产品已经比较成熟,比如海康的ids-2cd6810f/c1/3cmos双目智能客流统计网络摄像机基于双镜头的立体摄像,获取目标的高度信息,结合智能跟踪算法分析行人的行为轨迹。
55.根据本发明的安装位置的人流量选取适当数量的智能识别摄像头,提高监控和识别的效果,防止遗漏。
56.所述光汽警示装置4旋转设置于所述柱体1上,包括第二环形导轨41和至少一个光汽联动装置43,所述第二环形导轨41套设于所述柱体1上并通过连接块44与所述柱体1外壁固定连接,所述第二环形导轨41上移动设置有与所述光汽联动装置43数量相同的电动滑块42,所述光汽联动装置43固定于所述电动滑块42上。所述电动滑块 42包括驱动机构和传动机构,可沿第二环形导轨41移动,带动所述光汽联动装置43 沿第二环形导轨41移动。所述所述第二环形导轨41和电动滑块42的具体结构为本领域技术公知的现有技术,此处不再赘述。
57.所述光汽联动装置43包括垂直设置于所述电动滑块42上的两个分离的弧形支撑块 431,所述两个弧形支撑块431的侧壁开设有轴用通孔,所述两个轴用通孔内套设有轴承,两个轴承的内圈套设于旋转轴上,所述旋转轴贯穿其中一个弧形支撑块431的侧壁且其末端设置有旋转电机435,所述旋转电机435固定设置于所述电动滑块42上且所述旋转电机435的输出轴与所述旋转轴连接,所述旋转轴上连接有固定块432,所述喷射枪434和所述集束光源433固定设置于所述固定块432上。所述旋转电机435转动带动所述旋转轴转动,进而带动所述固定块432上的喷射枪434和述集束光源433转动,以指向目标的面部。
58.所述高压汽源包括导管连接的气泵81和雾化加湿装置82,所述雾化加湿装置82 和所述喷射枪434通过导管连接。气泵81用于提供压缩气体,所述所述雾化加湿装置 82包括加湿模块、调温模块,所述加湿模块用于对气泵81传输的气体进行加湿,所述调温模块用
于对加湿后的水汽进行冷却或加热,所述加湿模块的加湿工质里掺设有香味剂。
59.所述加湿模块和所述调温模块以及香味剂都是为了提高警示的效果。所述加湿模块可选用市场上的现有加湿器产品,所述调温模块为加热设备和冷却设备的组合机构,加热设备可选用电加热设备或化学物质与空气反应加热,冷却设备可选用压缩冷却设备或化学冷却设备,所述调温模块的调温方式本发明不做限制。
60.所述基座顶部开设有加料口21,以便对雾化加湿装置的加湿工质和调温工质进行补充。所述雾化加湿装置82和喷射枪434通过导管进行连接,中间可加设旋转接头以适应喷射枪434的转动,其具体连接结构为本领域技术人员公知,此处不再详细说明。
61.所述悬浮装置5插设于所述悬浮滑槽11内且其内部设置有永磁体53;所述移动磁力底座6包括可在所述安装腔12内竖直升降的电磁铁63;
62.所述悬浮装置5包括上下连接的卡座51和棱柱52,所述棱柱52插设于所述悬浮滑槽11内,所述悬浮滑槽11与所述棱柱52适配,所述卡座51卡接于所述柱体1顶部,所述永磁体53嵌设于所述卡座51或棱柱52的内部,所述棱柱52的侧壁间隔设置有荧光涂层和反光涂层;所述棱柱52为透明材质且为上宽下窄的锥形结构,所述棱柱52为透明材质以防止阻挡第二集束光源64,所述罪刑结构方便所述悬浮装置5下落时顺利进入所述悬浮滑槽11。所述卡座51的底部设置有弧形的第一凹槽,所述第一凹槽的侧壁设置有反射涂层,所述第一凹槽内固定设置有透明连接块54,所述透明连接块54的底部端面和所述卡座51的底部端面平齐,所述棱柱52连接于所述透明连接块54。所述荧光涂层可夜晚自发光,便于在晚上或光线较暗的情况下警示目标,所述反光涂层可反射自然光以提醒目标,所述荧光涂层和反光涂层是第二集束光源64的补充,防止第二集束光源64损坏影响警示效果。
63.所述柱体1的顶部设置有第二凹槽,所述第二凹槽的侧壁设置有反射涂层,所述第二凹槽内固定设置有第二透明块13,所述第二透明块13的底部端面和所述柱体1的顶部端面平齐,所述悬浮滑槽11贯穿所述第二透明块13。
64.所述移动磁力底座6还包括升降机构61和支撑板62,所述升降机构61竖直固定于所述安装腔12的内壁,所述支撑板62与所述升降机构61的升降部固定连接,所述电磁铁63设置于所述支撑板62上。所述升降机构61为电动导轨,所述升降部为电动导轨的滑块。所述永磁体53和所述电磁铁63的同性磁极相对,以推动所述悬浮装置。
65.所述电磁铁63为多个且绕所述支撑板62的中心环形分布,以使向上的磁力更为稳定,所述支撑板62的中心垂直向上设置有第二集束光源64。
66.所述卡座51底部和所述柱体1顶部的反射涂层和所述第二集束光源64,使光线聚齐于所述卡座51和所述柱体1之间,起到明显的警示效果。
67.如图8和图9所示,本发明还提供基于警示柱的多维精准电网用警示方法,包括如下步骤:
68.所述警示方法包括对接近警示柱的行人或动物进行警示的方法,具体步骤如下:
69.s101:所述智能监控组件31实时监控柱体1周边的行人或动物,并对进入预设警戒范围的行人或动物的运动轨迹进行识别和预测,判断是否有行人或动物将侵入警示区域,若有则将目标识别信息、目标的位置信息、目标的面部高度信息结合生成的目标信息实时传输至所述控制终端7,所述控制终端7接收目标信息并将目标加入目标集合;
70.s102:所述控制终端7对目标集合进行检索,判断集合中是否存在至少一个目标,
若存在,则跳转到步骤s103,若不存在,则跳转到步骤s101;
71.s103:所述控制终端7根据目标的实时位置信息对目标集合中的各个目标与各个光汽联动装置43绑定,生成目标和光汽联动装置43的映射关系,一个光汽联动装置43 可绑定多个目标;
72.s104:所述控制终端7根据所述映射关系控制所述光汽警示装置4,使各个光汽联动装置43在所述第二环形导轨41上移动并对其绑定的各个目标进行警示,警示的具体方法如下:首先控制所述集束光源433和喷射枪434指向目标的面部,再控制所述集束光源433发出脉冲式警示光线以提醒目标,同时控制所述喷射枪434将加湿后的水汽喷向目标面部;
73.s105:所述智能监控组件31跟踪目标并对各个目标受到警示后的运动轨迹进行识别,判断各个目标的运动轨迹是否远离警示区域,若是,则将远离的目标从目标集合中删除,跳转到步骤s102;
74.所述警示方法还包括对处于密闭驾驶空间的驾驶员的警示方法,具体步骤如下:
75.s201:所述控制终端7控制所述电磁铁63通电,并控制所述升降机构61带动电磁铁63向上运动,所述电磁铁63通过磁力推动所述悬浮装置5向上运动,并最终悬浮于所述柱体1的顶部;
76.s202:所述控制终端7控制所述第二集束光源64通电并照射向所述悬浮装置5,并在所述卡座51底部和所述柱体1顶部的反射层作用下,使光线聚集于所述卡座51和所述柱体1顶部之间的空间;
77.s203:所述控制终端7控制所述升降机构61带动电磁铁63向下运动,进而带动所述悬浮装置5向下运动,并最终插设于所述悬浮滑槽11内,所述控制终端7控制所述电磁铁63、第二集束光源64断电。
78.在进行步骤s201之前,可通过所述风速计322检测外部风速,若风速过大则停止所述悬浮装置5的升降,避免所述悬浮装置5不能正常降落。
79.所述步骤s101所述预设警戒范围为通过所述控制终端7预设的警戒范围,所述警示区域为实际警示区域,所述警戒范围的范围大于所述警示区域的范围。
80.所述步骤s101中,所述智能监控组件31初始处于休眠状态,所述环境监测模块3 中的红外感应传感器323实时监测是否有人进入所述柱体1周边的警戒范围,当有人物进入时,所述智能监控组件31启动开始监控柱体1周边的行人物并进行智能识别;当所述红外感应传感器323监测到所述警戒范围内无人或动物存在时,所述控制终端7控制所述智能监控组件31休眠。
81.在所述步骤s103中,目标与各个光汽联动装置43绑定规则为根据目标的实时位置分配。具体如下:所述光汽联动装置43的数量为n,每个光汽联动装置43相对于所述柱体1中心线的角度行程为360度除以n,若目标实时位置处于其中一个光汽联动装置 43的角度行程所对应的空间区域,则将目标与此光汽联动装置43绑定。比如:所述光汽联动装置43的数量为4个,则将所述柱体1的周围360度空间等分为4段,每个光汽联动装置43都负责相对于所述柱体1中心线为90度的夹角空间。
82.所述控制终端7根据所述温湿度传感器321监测到的外部温湿度信息实时控制所述雾化加湿装置82对导管中的气体进行预处理,实时保持导管中的气体温湿度与外部气体的温湿度差异较大,以使所述喷射枪434喷射水汽的操作对目标的提醒效果更为明显。
83.所述基于警示柱的多维精准电网用警示方法还包括所述控制终端7控制所述光汽警示装置4中的各个喷射枪434向周围周期性地喷射水汽,以优化周边环境并形成与外界差异性较大的加湿区域以提醒进入所述加湿区域的行人;
84.所述控制终端7周期性地控制各个喷射枪434喷射柱体1以进行自清洁。
85.上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于上述实施方式,在所属技术领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下作出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1