智能监控方法、装置、可穿戴设备和可读存储介质与流程
1.本技术涉及安全防控领域,具体涉及一种智能监控方法、装置、可穿戴设备和可读存储介质。
背景技术:
2.随着游泳运动的不断普及,目前游泳运动的安全显得更为重要。例如,在同一个泳区内,存在多名游泳者,当游泳者速度过快或者下潜时无法估计同其它游泳者之间的距离或相邻游泳者的肢体幅度,则会造成碰撞等事故,并且,游泳者为小孩子居多,监护者需要实时监控游泳者信息,以确保游泳者在监护者所监控的安全范围内进行游泳,因此,目前游泳池的目标游泳者的泳区安全状态亟需提高。
技术实现要素:
3.鉴于此,本技术提供一种智能监控方法、装置、可穿戴设备和可读存储介质,能够对目标游泳者的运动状态进行安全状态评估,以提高目标游泳者自身的安全性。
4.一种智能监控方法,目标游泳者配置有对应的可穿戴设备,所述可穿戴设备设置有智能监控装置,该智能监控方法包括:
5.获取目标游泳者在行进时的前方视角拍摄图像和后方视角拍摄图像;
6.根据前方视角拍摄图像和后方视角拍摄图像以确定目标游泳者对应的全景拍摄图像;
7.获取目标游泳者对应的uwb定位信息;
8.根据目标游泳者对应的全景拍摄图像和uwb定位信息对目标游泳者的运动状态进行安全状态评估。
9.在一个实施例中,获取目标游泳者在行进时的前方视角拍摄图像和后方视角拍摄图像的步骤之前还包括:
10.获取目标游泳者在行进时对应的水压检测参数,当水压检测参数大于预设水压检测阈值时,执行后续步骤。
11.在一个实施例中,根据目标游泳者对应的全景拍摄图像和uwb定位信息对目标游泳者的运动状态进行安全状态评估的步骤包括:
12.根据对应的全景拍摄图像,获取目标游泳者的周围环境信息;
13.根据对应的周围环境信息和uwb定位信息,判断目标游泳者是否在预设安全距离范围内;
14.当目标游泳者不在预设安全距离范围内时,判断目标游泳者处于危险运动状态。
15.在一个实施例中,当目标游泳者均在预设安全距离范围内时,智能监控方法还包括:
16.根据对应的全景拍摄图像,获取目标游泳者的在水上和水下之间的切换频率以及水下停留时间;
17.判断切换频率是否低于预设切换频率;
18.若是,则判断水下停留时间是否大于水下预设停留时间;
19.当水下停留时间大于水下预设停留时间时,则判定目标游泳者处于危险运动状态。
20.在一个实施例中,uwb定位信息包括目标游泳者相对于uwb定位基站的位置信息,当所述目标游泳者在预设安全距离范围内时,智能监控方法还包括:
21.根据uwb定位信息,确定目标游泳者相对于uwb定位基站的角度信息;
22.根据预设角度阈值以及角度信息,判断目标游泳者是否处于偏离直线行进方向的状态;
23.若是,则生成偏离提示与调整信号以使目标游泳者调整并保持为直线行进状态。
24.在一个实施例中,当目标游泳者处于危险运动状态时,智能监控方法还包括:
25.将对应的全景拍摄图像,划分为感兴趣区域和非感兴趣区域,感兴趣区域包括至少一游泳者的人体轮廓信息;
26.获取与目标游泳者距离最近的游泳者的人体轮廓信息;
27.根据游泳者的人体轮廓信息,获取对应的人体关键点信息,人体关键点信息包括各个肢体关节的位置以及摆动幅度信息;
28.根据人体关键点信息组合得到对应的人体姿态信息;
29.将人体姿态信息输入至预设神经网络模型以判断游泳者的人体姿态信息是否符合预设人体姿态信息;
30.若否,则生成提示信息以提醒目标游泳者。
31.在一个实施例中,智能监控方法还包括:
32.当目标游泳者不在预设安全距离范围内且判断所述目标游泳者处于危险运动状态时,生成第一提示信号以进行振动提示;
33.当所述水下停留时间大于所述水下预设停留时间且判定目标游泳者处于所述危险运动状态时,生成第二提示信号以进行灯光闪烁提示。
34.一种智能监控装置,用于设置在可穿戴设备上,智能监控装置包括:
35.第一摄像单元,用于获取目标游泳者在行进时的前方视角拍摄图像;
36.第二摄像单元,用于获取目标游泳者在行进时的后方视角拍摄图像;
37.uwb定位单元,用于与uwb定位基站建立通信连接以进行通信,以获取目标游泳者对应的uwb定位信息并发送至处理器;
38.处理器,分别与第一摄像单元、第二摄像单元和uwb定位单元电性连接,用于根据前方视角拍摄图像和后方视角拍摄图像以确定目标游泳者对应的全景拍摄图像,根据目标游泳者对应的全景拍摄图像和uwb定位信息对目标游泳者的运动状态进行安全状态评估。
39.在一个实施例中,可穿戴设备为泳帽,第一摄像单元包括至少两个摄像头:至少一摄像头设置在泳帽前方的顶部边缘,用于获取目标游泳者在行进时前方的水上视角拍摄图像;至少一摄像头设置在泳帽前方的底部边缘,用于获取目标游泳者在行进时前方的水下视角拍摄图像。
40.在一个实施例中,可穿戴设备为泳帽,第二摄像单元包括至少两个摄像头:至少一摄像头设置在泳帽前方的顶部边缘,用于获取目标游泳者在行进时后方的水上视角拍摄图
像;至少一摄像头设置在泳帽后方的底部边缘,用于获取目标游泳者在行进时后方的水下视角拍摄图像。
41.在一个实施例中,智能监控装置还包括:
42.水压检测单元,与处理器电性连接,用于获取目标游泳者在行进时对应的水压检测参数并发送至处理器;
43.处理器还用于当水压检测参数大于预设水压检测阈值时,控制第一摄像单元、第二摄像单元和uwb定位单元进行工作。
44.在一个实施例中,在执行根据目标游泳者对应的全景拍摄图像和uwb定位信息对目标游泳者的运动状态进行安全状态评估的过程中,处理器用于根据对应的全景拍摄图像,获取目标游泳者的自身实时活动范围,根据各个游泳者的自身实时活动范围和uwb定位信息,判断目标游泳者是否在预设安全距离范围内,当目标游泳者不在预设安全距离范围内时,判断目标游泳者处于危险运动状态。
45.在一个实施例中,当目标游泳者均在预设安全距离范围内时,处理器还用于根据对应的全景拍摄图像,获取目标游泳者的在水上和水下之间的切换频率以及水下停留时间,判断切换频率是否低于预设切换频率,若是,则判断水下停留时间是否大于水下预设停留时间,当水下停留时间大于水下预设停留时间时,则判定目标游泳者处于危险运动状态。
46.在一个实施例中,智能监控装置还包括与处理器电性连接的报警提示单元,报警提示单元包括第一振动提示单元和灯光提示单元,第一振动提示单元和灯光提示单元均设置在可穿戴设备的顶部区域;
47.处理器还用于当目标游泳者不在预设安全距离范围内且判断目标游泳者处于危险运动状态时,生成第一提示信号并发送至第一振动提示单元;
48.第一振动提示单元用于根据第一提示信号进行振动提示;
49.处理器还用于当水下停留时间大于水下预设停留时间且判定目标游泳者处于危险运动状态时,生成第二提示信号并发送至灯光提示单元;
50.灯光提示单元用于根据第二提示信号进行灯光闪烁提示。
51.在一个实施例中,智能监控装置还包括与处理器电性连接的无线传输单元,无线传输单元设置在可穿戴设备的顶部区域,处理器还用于将第一提示信号和第二提示信号通过无线传输单元发送至监控终端。
52.在一个实施例中,uwb定位信息包括目标游泳者相对于uwb定位基站的位置信息,报警提示单元还包括第二振动提示单元和第三振动提示单元,第二振动提示单元和第三振动提示单元分别对称设置在可穿戴设备左右两侧区域;
53.当所述目标游泳者在预设安全距离范围内时,处理器还用于根据uwb定位信息,确定目标游泳者相对于uwb定位基站的角度信息,根据预设角度阈值以及角度信息,判断目标游泳者是否处于偏离直线行进方向的状态,若是,则生成偏离提示与调整信号并发送至第二振动提示单元或第三振动提示单元;
54.第二振动提示单元或第三振动提示单元用于根据偏离提示与调整信号进行振动提示,以使目标游泳者调整并保持为直线行进状态。
55.在一个实施例中,处理器还用于当目标游泳者处于危险运动状态时,将对应的全景拍摄图像,划分为感兴趣区域和非感兴趣区域,感兴趣区域包括至少一游泳者的人体轮
廓信息;获取与目标游泳者距离最近的游泳者的人体轮廓信息;根据游泳者的人体轮廓信息,获取对应的人体关键点信息,人体关键点信息包括各个肢体关节的位置以及摆动幅度信息;根据人体关键点信息组合得到对应的人体姿态信息;将人体姿态信息输入至预设神经网络模型以判断游泳者的人体姿态信息是否符合预设人体姿态信息;若否,则生成提示信息以提醒目标游泳者。
56.此外,还提供一种可穿戴设备,设置上述智能监控装置。
57.此外,还提供一种可读存储介质,可读存储介质存储有计算机程序,计算机程序在被处理器执行时实施上述智能监控方法。
58.上述智能监控方法,通过获取目标游泳者在行进时的前方视角拍摄图像和后方视角拍摄图像,根据前方视角拍摄图像和后方视角拍摄图像以确定目标游泳者对应的全景拍摄图像,获取目标游泳者对应的uwb定位信息,根据目标游泳者对应的全景拍摄图像和uwb定位信息对目标游泳者的运动状态进行安全状态评估,进而能够根据对应的评估结果对游泳者进行实时提示,使得游泳者能够及时的获取到周边实时环境信息以结束危险运动状态,例如进行避让或者减速,大大提高了游泳者自身的安全性。
附图说明
59.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
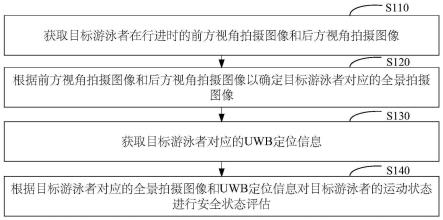
60.图1是本技术实施例提供的第一种智能监控方法的流程示意图;
61.图2是本技术实施例提供的第二种智能监控方法的流程示意图;
62.图3是本技术实施例提供的第一种对目标游泳者的运动状态进行安全状态评估的方法流程示意图;
63.图4是本技术实施例提供的第二种对目标游泳者的运动状态进行安全状态评估的方法流程示意图;
64.图5是本技术实施例提供的第三种对目标游泳者的运动状态进行安全状态评估的方法流程示意图;
65.图6是本技术实施例提供的第四种对目标游泳者的运动状态进行安全状态评估的方法流程示意图;
66.图7是本技术实施例提供的一种智能监控装置的结构框图;
67.图8是本技术实施例提供的一种智能监控装置的结构示意图;
68.图9是本技术实施例提供的一种智能监控装置中uwb定位单元工作的第一界面示意图;
69.图10是本技术实施例提供的一种智能监控装置中uwb定位单元工作的第二界面示意图。
具体实施方式
70.下面结合附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描
述的实施例仅是本技术一部分实施例,而非全部实施例。基于本技术中的实施例,本领域技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。在不冲突的情况下,下述各个实施例及其技术特征可以相互组合。
71.如图1所示,提供一种智能监控方法,目标游泳者配置有对应的可穿戴设备,可穿戴设备设置有智能监控装置,该智能监控方法包括:
72.步骤s110,获取目标游泳者在行进时的前方视角拍摄图像和后方视角拍摄图像。
73.其中,泳区内通常存在多个游泳者进行游泳,容易发生水中碰撞,为了对各个游泳者进行监护,因而需要获取目标游泳者在行进时的前方视角拍摄图像和后方视角拍摄图像。
74.其中,游泳者佩戴有泳具,为了获取游泳者在行进时的前方视角拍摄图像,需要在对应的泳具身上设置多个摄像单元,以泳具为泳帽为例说明,例如通过第一摄像单元获取目标游泳者在行进时的前方视角拍摄图像,第一摄像单元至少包括两个摄像头,至少一摄像头设置在泳帽前方的顶部边缘,用于获取目标游泳者在行进时前方的水上视角拍摄图像;至少一摄像头设置在泳帽前方的底部边缘,用于获取目标游泳者在行进时前方的水下视角拍摄图像。
75.同样地,为了获取游泳者在行进时的后方视角拍摄图像,以泳具为泳帽为例说明,例如通过第二摄像单元获取目标游泳者在行进时的后方视角拍摄图像,第二摄像单元至少包括两个摄像头,至少一摄像头设置在泳帽前方的顶部边缘,用于获取目标游泳者在行进时后方的水上视角拍摄图像;至少一摄像头设置在泳帽后方的底部边缘,用于获取目标游泳者在行进时后方的水下视角拍摄图像。
76.当然,为了获取更大范围视角拍摄图像,可在泳帽的左右两侧分别设置相应的摄像头,进而使得获得的视角拍摄图像更全面。
77.在一个实施例中,上述摄像头采用鱼眼摄像头。
78.步骤s120,根据前方视角拍摄图像和后方视角拍摄图像以确定目标游泳者对应的全景拍摄图像。
79.其中,在得到前方视角拍摄图像和后方视角拍摄图像之后,还需要进行畸变校正处理,以得到畸变校正处理后的前方视角拍摄图像和后方视角拍摄图像,这是因为鱼眼超广角镜头的所采集到的图像通常存在畸变。
80.进一步地,还需要将畸变校正处理后的前方视角拍摄图像和后方视角拍摄图像进行图像拼接,这是因为,游泳者在佩戴泳具游泳时,身体在水中浮动,对应的摄像头视角范围也发生变化,例如,前方的水上视角拍摄图像中通常大部分视角是水上图像,小部分视角为折射后的水下图像,前方的水下视角拍摄图像中通常大部分视角是水下图像,小部分视角为折射后的水上图像,因此,此时需要对经过水面与空气不同介质的折射导致的图像进行优化预处理,进而将前方的水上视角拍摄图像和水下视角拍摄图像,以及后方的水上视角拍摄图像和水下视角拍摄图像四幅图像进行拼接以生成对应的全景拍摄图像。
81.步骤s130,获取目标游泳者对应的uwb定位信息。
82.其中,uwb(ultra wide band,超宽带技术)是一种无线载波通信技术,uwb技术具有系统复杂度低,发射信号功率谱密度低,对信道衰落不敏感、截获能力低和定位精度高等优点,可将定位与通信合一,尤其适用于室内等密集多径场所的高速无线接入。
83.其中,游泳者佩戴的泳具上设置有uwb定位单元,泳区内的预设区域内设置有对应的uwb定位基站,泳具上设置的uwb定位单元与uwb定位基站能够建立通信连接以进行uwb通信,进而uwb定位单元能够获取目标游泳者对应的uwb定位信息。
84.步骤s140,根据目标游泳者对应的全景拍摄图像和uwb定位信息对目标游泳者的运动状态进行安全状态评估。
85.其中,游泳者在游泳的过程中,一方面,游泳者的周围环境不断发生变化,例如与其它游泳者之间的实时距离不断变化,以及游泳者本身距离泳区边界或者泳道边界的距离也在变化;另一方面,游泳者本身的游泳状态也发生变化,例如发生溺水和呛水等意外情况,上述情形均可归于游泳者的安全运动范畴。
86.因此,在获取目标游泳者对应的全景拍摄图像和uwb定位信息之后,可对目标游泳者的运动状态进行安全状态评估,以得到目标游泳者的运动状态的安全状态评估结果。
87.上述智能监控方法,通过获取目标游泳者在行进时的前方视角拍摄图像和后方视角拍摄图像,根据前方视角拍摄图像和后方视角拍摄图像以确定目标游泳者对应的全景拍摄图像,获取目标游泳者对应的uwb定位信息,根据目标游泳者对应的全景拍摄图像和uwb定位信息对目标游泳者的运动状态进行安全状态评估,进而能够根据对应的评估结果对游泳者进行实时提示,例如使得游泳者能够及时的获取到周边实时环境信息以进行避让或者减速,从而结束危险运动状态,大大提高了游泳者自身的安全性。
88.在一个实施例中,如图2所示,步骤s110之前还包括:
89.步骤s150,获取目标游泳者在行进时对应的水压检测参数,当水压检测参数大于预设水压检测阈值时,执行后续步骤。
90.其中,游泳者佩戴有泳具,泳具上设置有水压检测单元,只有当游泳者进入游泳状态且水压检测单元对应的水压检测参数大于预设水压检测阈值时,泳具上设置的其它工作单元才工作,即执行后续的步骤。
91.本实施例中,通过设置水压检测单元,能够确保只有游泳者处于游泳状态时方才进行检测,降低了泳具上对应的硬件设备的功耗,提高了整体的处理效率。
92.在一个实施例中,如图3所示,步骤s140包括:
93.步骤s141,根据对应的全景拍摄图像,获取目标游泳者的周围环境信息。
94.其中,在获得对应的全景拍摄图像之后,由于全景拍摄图像包含了目标游泳者所处的周围环境状态,因而根据对应的全景拍摄图像,获取目标游泳者的周围环境信息,周围环境信息包括与其它游泳者之间的实时距离,以及游泳者本身距离泳区边界或者泳道边界的距离等。
95.步骤s142,根据对应的周围环境信息和uwb定位信息,判断目标游泳者是否在预设安全距离范围内,若否,则进入步骤s143。
96.举例说明,当周围环境信息包括与其它游泳者之间的实时距离,以及游泳者本身距离泳区边界或者泳道边界的距离时,在获取到对应游泳者的周围环境信息和uwb定位信息之后,可得到当前的游泳者与其它各个游泳者之间的第一实时距离,当前的游泳者距离泳区边界的第二实时距离,以及当前的游泳者距离泳道边界的第三实时距离,进而判断各个实时距离是否在各自对应的预设安全距离内,根据实际应用场景的需求,可对以上第一实时距离、第二实时距离和第三实时距离中的至少一个设置预设安全距离范围。
97.步骤s143,判断目标游泳者处于危险运动状态。
98.当目标游泳者不在预设安全距离范围内时,判断目标游泳者处于危险运动状态,进而进行提示,以为后续的调整过程奠定基础。
99.在一个实施例中,如图4所示,当目标游泳者均在预设安全距离范围内时,智能监控方法还包括:
100.步骤s144,根据对应的全景拍摄图像,获取目标游泳者的在水上和水下之间的切换频率以及水下停留时间。
101.其中,在根据对应的全景拍摄图像获取游泳者对应的周围环境信息之后,还可进一步对目标游泳者在水上和水下之间的切换频率进行统计,以及对水下停留时间进行统计。
102.步骤s145,判断切换频率是否低于预设切换频率,若是,则进入步骤s146。
103.其中,游泳者在游泳时,在水上和水下之间的切换频率通常不低于某个频率值,因而可通过判断目标游泳者的在水上和水下之间的切换频率,以对游泳者的游泳状态进行判断。
104.步骤s146,判断水下停留时间是否大于水下预设停留时间,当水下停留时间大于水下预设停留时间时,则进入步骤s147。
105.其中,当游泳者在水上和水下之间的切换频率低于预设切换频率时,并不一定能确定游泳者的游泳状态异常,此时还需要判断水下停留时间是否大于水下预设停留时间,当水下停留时间大于水下预设停留时间时,进入步骤s143。
106.本实施例中,通过根据对应的全景拍摄图像,获取目标游泳者的在水上和水下之间的切换频率以及水下停留时间,进而判断切换频率是否低于预设切换频率,若是,则进一步判断水下停留时间是否大于水下预设停留时间,当水下停留时间大于水下预设停留时间时,判定目标游泳者处于危险运动状态,从游泳者本身的游泳习惯规律出发,当游泳者发声呛水、溺水等紧急情况时,可第一时间获取到目标游泳者处于危险运动状态,进一步提升了对目标游泳者的运动状态进行安全状态评估的能力,提高了目标游泳者自身的安全性。
107.在一个实施例中,uwb定位信息包括目标游泳者相对于uwb定位基站的位置信息,如图5所示,当目标游泳者在预设安全距离范围内时,智能监控方法还包括:
108.步骤s147a,根据uwb定位信息,确定目标游泳者相对于uwb定位基站的角度信息。
109.其中,uwb定位信息包括目标游泳者相对于uwb定位基站的位置信息,根据位置信息通常可确定对应的角度信息,因而可根据uwb定位信息,确定目标游泳者相对于uwb定位基站的角度信息。
110.其中,uwb定位基站的数量和位置视实际应用情况进行设定。
111.步骤s147b,根据预设角度阈值以及角度信息,判断目标游泳者是否处于偏离直线行进方向的状态,若是则进入步骤s147c。
112.其中,在某些应用场景,需要目标游泳者在各自的泳道内保持为直线行进状态,以进一步提高游泳者自身的安全状态,此时当角度信息大于预设角度阈值和/或实时人体姿态信息出现异常时,可判断目标游泳者处于偏离直线行进方向的状态。
113.步骤s147c,生成偏离提示与调整信号以使目标游泳者调整并保持为直线行进状态。
114.其中,当判断游泳者处于直线行进方向的偏离状态时,生成偏离提示与调整信号,进而使得游泳者调整并保持为直线行进状态。
115.在一个实施例中,泳区内设置有多条泳道,为避免各个泳道内的游泳者之间发生碰撞,需要确保各个游泳者自身处于直线行进状态(即处于直线行进方向)或基本接近直线行进状态(即对偏离程度有一定的限制和要求),此时结合uwb定位信息中的游泳者相对于uwb定位基站的角度信息,最终进一步确定游泳者是否处于直线行进方向的偏离状态,从而在确保目标游泳者在预设安全距离范围内时,能够进一步对游泳者的自身游泳状态进行精确调整,进一步提升了总体的安全性。
116.本实施例中,上述预设角度阈值与超宽带定位基站的数量、对应的设置位置以及对应的实际环境情况相关联,例如当泳区包含多条泳道时,每条泳道的边缘区域的中心位置设置一超宽带定位基站,为避免各条泳道相互影响,此时需要对每条泳道的游泳者的偏离情况进行严格限定,此时上述预设角度阈值设置范围相对较窄,例如可为-1.5度~1.5度。
117.需要说明的是,在实际应用过程中,只要当角度信息未超过对应的预设角度阈值,在工程领域,仍然认为上述游泳者自身处于“直线行进状态”,换言之,游泳者自身对应的整个行进路径即使不是数学理论意义上的直线路径,但是与数学理论意义上直线路径之间的差距小于预设差值范围时,仍然认为上述游泳者自身对应的行进路径为“直线行进路径”,对应的行进状态仍然为“直线行进状态”。
118.在一个实施例中,如图6所示,当目标游泳者处于危险运动状态时,智能监控方法还包括:
119.步骤s160,将对应的全景拍摄图像,划分为感兴趣区域和非感兴趣区域,感兴趣区域包括至少一游泳者的人体轮廓信息。
120.其中,针对当前的对应游泳者而言,存在多个游泳者时,其对应的全景拍摄图像中必然包含至少一游泳者的人体轮廓信息,由于泳区水域内颜色以蓝色为主,因而图像色彩里的rgb值的b值的权重占比较大,例如蓝色的rgb值为(0,0,255),则b值所占rgb值比重为100%,r值、g值所占rgb值比重均为0;天蓝色的rgb值为(240,255,255),则r值所占rgb值比重均为32%,g值、b值所占rgb值比重为34%,深天蓝色(0,191,255),则r值所占rgb值比重均为0,g值所占rgb值比重为43.8%,b值所占rgb值比重为56.2%,而白色的rgb值(255,255,255),r值、g值、b值所占rgb值比重为33.3%,通常,根据光线昏暗的泳区(如室内泳区、深水区)为深天蓝色,而光线充足的泳区(如户外泳区、浅水区),特定环境下得到图像色彩里的rgb值的b值的权重,则可提取全景拍摄图像的水域区域特征。
121.其中,根据色差梯度插值,遍历的全景拍摄图像可以得到每个像素点的水平和垂直两个方向的色差,计算水平方向和垂直方向的色差梯度值,根据色差梯度值可以求取水平方向和垂直方向的权重,最终插值得到r/b点的g分量信息、r/g点的b分量信息、g/b点的r分量信息,从而获取接近水域的至少一游泳者的人体边缘特征点信息;
122.通过全景拍摄图像中的水下部分图像对应的人体边缘特征点信息补偿得到对应水上部分图像的人体边缘特征点信息,以得到包含至少一游泳者的人体轮廓信息的感兴趣区域。
123.步骤s161,获取与目标游泳者距离最近的游泳者的人体轮廓信息。
124.其中,针对目标游泳者而言,当不在预设安全距离范围内时,可能存在多个其它的游泳者在目标游泳者附近,例如泳区内存在多条泳道,此时每条泳道内都存在游泳者,此时需要关注的是目标游泳者距离最近的游泳者是否对目标游泳者造成安全威胁,因此进一步与获取与目标游泳者距离最近的游泳者的人体轮廓信息。
125.其中,与目标游泳者距离最近的游泳者通常至少存在一个,当存在多个游泳者与目标游泳者的距离相等的情况时,分别获取多个与目标游泳者距离最近的游泳者的人体轮廓信息,然后分别执行后续各步骤。步骤s162,根据游泳者的人体轮廓信息,获取对应的人体关键点信息,人体关键点信息包括各个肢体关节的位置以及摆动幅度信息。
126.其中,通过实时的连续多帧全景拍摄图像的人体轮廓信息,能够计算确定包括各个肢体关节的位置以及摆动幅度信息的人体关键点信息。
127.步骤s163,根据人体关键点信息组合得到对应的人体姿态信息。
128.步骤s164,将人体姿态信息输入至预设神经网络模型以判断游泳者的人体姿态信息是否符合预设人体姿态信息,若是,则进入步骤s165。
129.其中,该预设神经网络模型可采用yolo目标识别网络,上述预设人体姿态信息包含了行进方向或者行进趋势朝向目标游泳者的人体姿态信息,通过判断游泳者的人体姿态信息是否符合预设人体姿态信息,能够准确及时的获取其他游泳者的行进方向或者行进趋势,进而使得当前的目标游泳者能够实时评估其他目标游泳者对于自身的游泳运动所造成的安全威胁。
130.在一个实施例中,当存在多个游泳者与目标游泳者的距离相等的情况时,需要分别通过执行步骤s162~步骤s164,以判断各个游泳者的人体姿态信息是否符合预设人体姿态信息,当存在一游泳者的人体姿态信息符合预设人体姿态信息时,执行步骤s165。
131.步骤s165,生成提示信息以提醒目标游泳者。
132.本实施例中,通过判断游泳者的人体姿态信息是否符合预设人体姿态信息,能够及时获取距离当前对应游泳者最近的游泳者的行进趋势,进而能够及时的评估其他游泳者对于目标游泳者所带来的运动安全威胁,进一步提升了当前对应游泳者的运动安全性。
133.在一个实施例中,智能监控方法还包括:
134.当目标游泳者不在预设安全距离范围内且判断目标游泳者处于危险运动状态时,生成第一提示信号以进行振动提示;
135.当水下停留时间大于水下预设停留时间且判定目标游泳者处于危险运动状态时,生成第二提示信号以进行灯光闪烁提示。
136.即当判断目标游泳者处于危险运动状态时,生成报警提示信息以进行提示,并将报警提示信息发送至监控终端。
137.其中,当判断目标游泳者处于危险运动状态时,生成报警提示信息以进行提示,进而使得游泳者自身能够及时进行调整,且能够将报警提示信息发送至监控终端,使得对应的监控人员能够及时的对游泳者自身的危险运动状态做出反应。
138.此外,如图7所示,还提供一种智能监控装置200,用于设置在可穿戴设备上,目标游泳者配置有对应的可穿戴设备,智能监控装置200包括:
139.第一摄像单元210,用于获取目标游泳者在行进时的前方视角拍摄图像;
140.第二摄像单元220,用于获取目标游泳者在行进时的后方视角拍摄图像;
141.uwb定位单元230,用于与uwb定位基站建立通信连接以进行通信,以获取目标游泳者对应的uwb定位信息并发送至处理器;
142.处理器240,分别与第一摄像单元210、第二摄像单元220和uwb定位单元230电性连接,用于根据前方视角拍摄图像和后方视角拍摄图像以确定目标游泳者对应的全景拍摄图像,根据目标游泳者对应的全景拍摄图像和uwb定位信息对目标游泳者的运动状态进行安全状态评估。
143.在一个实施例中,可穿戴设备为泳帽,第一摄像单元210包括均与处理器电性连接的至少两个摄像头:至少一摄像头设置在泳帽前方的顶部边缘,用于获取目标游泳者在行进时前方的水上视角拍摄图像;至少一摄像头设置在泳帽前方的底部边缘,用于获取目标游泳者在行进时前方的水下视角拍摄图像,处理器用于将前方的水上视角拍摄图像和前方的水下视角拍摄图像拼接成前方视角拍摄图像。
144.在一个实施例中,可穿戴设备为泳帽,第二摄像单元220包括均与处理器电性连接的至少两个摄像头:至少一摄像头设置在泳帽前方的底部边缘,用于获取目标游泳者在行进时前方的后方视角拍摄图像;至少一摄像头设置在泳帽后方的底部边缘,用于获取目标游泳者在行进时后方的后方视角拍摄图像,处理器用于将后方的水上视角拍摄图像和后方的水下视角拍摄图像拼接成后方视角拍摄图像。
145.举例说明,如图7和图8所示,可穿戴设备10为泳帽,以第一摄像单元210和第二摄像单元220均包括两个摄像头为例说明,第一摄像单元210包括第一摄像头211和第二摄像头212,第二摄像单元220包括第三摄像头221和第四摄像头222,其中,第一摄像头211设置在泳帽前方的顶部边缘,第二摄像头212设置在泳帽前方的底部边缘,第三摄像头221设置在泳帽后方的底部边缘,第四摄像头222设置在泳帽后方的底部边缘,uwb定位单元230设置在泳帽的顶部位置,以使得与uwb定位基站之间的信号更好的传输,避免水体造成的信号传输的影响。
146.在一个实施例中,如图7和图8所示,智能监控装置200还包括:
147.水压检测单元250,与处理器240电性连接,用于获取目标游泳者在行进时对应的水压检测参数并发送至处理器240;
148.处理器240还用于当水压检测参数大于预设水压检测阈值时,控制第一摄像单元210、第二摄像单元220和uwb定位单元230进行工作。
149.在一个实施例中,如图8所示,水压检测单元250设置在泳帽的底部边缘。
150.在一个实施例中,在执行根据目标游泳者对应的全景拍摄图像和uwb定位信息对目标游泳者的运动状态进行安全状态评估的过程中,处理器240用于根据对应的全景拍摄图像,获取目标游泳者的自身实时活动范围,根据各个游泳者的自身实时活动范围和uwb定位信息,判断目标游泳者是否在预设安全距离范围内,当目标游泳者不在预设安全距离范围内时,判断目标游泳者处于危险运动状态。
151.在一个实施例中,当目标游泳者均在预设安全距离范围内时,处理器240还用于根据对应的全景拍摄图像,获取目标游泳者的在水上和水下之间的切换频率以及水下停留时间,判断切换频率是否低于预设切换频率,若是,则判断水下停留时间是否大于水下预设停留时间,当水下停留时间大于水下预设停留时间时,则判定目标游泳者处于危险运动状态。
152.在一个实施例中,如图7和图8所示,智能监控装置200还包括与处理器240电性连
接的报警提示单元260,报警提示单元260包括均与处理器电性连接的第一振动提示单元261和灯光提示单元262,第一振动提示单元261和灯光提示单元262均设置在可穿戴设备10的顶部区域;
153.处理器240还用于当目标游泳者不在预设安全距离范围内且判断目标游泳者处于危险运动状态时,生成第一提示信号并发送至第一振动提示单元261;
154.第一振动提示单元261用于根据第一提示信号进行振动提示;
155.处理器240还用于当水下停留时间大于水下预设停留时间且判定目标游泳者处于危险运动状态时,生成第二提示信号并发送至灯光提示单元262;
156.灯光提示单元262用于根据第二提示信号进行灯光闪烁提示。
157.在一个实施例中,如图7和图8所示,智能监控装置200还包括与处理器240电性连接的无线传输单元270,无线传输单元270设置在可穿戴设备10的顶部区域,处理器240还用于将第一提示信号和第二提示信号通过无线传输单元270发送至监控终端。所述的监控终端为监护者移动通信设备,与游泳者的智能监控装置建立通信,当目标游泳者不在预设安全距离范围内且判断目标游泳者处于危险运动状态时,对监控发送相应的全景图像以及uwb定位信息,使得监控者能及时定位游泳者的位置信息。
158.在一个实施例中,uwb定位信息包括目标游泳者相对于uwb定位基站的位置信息,如图7和图8所示,报警提示单元260还包括均与处理器电性连接的第二振动提示单元263和第三振动提示单元264,第二振动提示单元263和第三振动提示单元264分别对称设置在可穿戴设备10左右两侧区域。
159.当目标游泳者在预设安全距离范围内时,处理器240还用于根据uwb定位信息,确定目标游泳者相对于uwb定位基站的角度信息,根据预设角度阈值以及角度信息,判断目标游泳者是否处于偏离直线行进方向的状态,若是,则生成偏离提示与调整信号并发送至第二振动提示单元263或第三振动提示单元264;
160.第二振动提示单元263或第三振动提示单元264用于根据偏离提示与调整信号进行振动提示,以使目标游泳者调整并保持为直线行进状态。
161.需要指出的是,图8所示的图形中,各个标号所对应的圆形符号和框型符号仅仅表示各个对应单元所在的实际位置区域,圆形符号和框型符号的本身并不代表对应的单元的实际形状,各个单元的形状视实际需求设定,例如灯光提示单元262可设置成环绕泳帽的灯带形状以增加对应的灯光提示面积,进而提升对应的灯光提示效果。
162.在一个实施例中,泳区内设置有多个泳道,泳区的预设区域边缘位置设置有uwb定位基站(每条泳道设置至少两个uwb定位基站),以泳道1为例,如图9所示,泳道1设置两个uwb定位基站300,游泳者佩戴可穿戴设备10前行,在游泳者向行进方向的左侧进行偏离时,该方位角α1的绝对值大于预设角度阈值大小,进一步结合实时人体姿态信息,处理器240判定游泳者处于直线行进方向的偏离状态,则生成偏离提示与调整信号并发送至第二振动提示单元263,进而第二振动提示单元263根据偏离提示与调整信号进行振动提示,以使目标游泳者调整并保持为直线行进状态。
163.同样地,如图10所示,在游泳者向行进方向的右侧进行偏离时,该方位角α1的绝对值大于预设角度阈值大小,进一步结合实时人体姿态信息,处理器240判定游泳者处于直线行进方向的偏离状态,则生成偏离提示与调整信号并发送至第三振动提示单元264,进而第
三振动提示单元264根据偏离提示与调整信号进行振动提示,以使目标游泳者调整并保持为直线行进状态。
164.本实施例中,泳区内存在多条泳道,通过上述智能监控装置200,使得目标游泳者在预设安全距离范围内时,能够进一步确保游泳者自身在行进状态时处于直线行进状态,从而使得游泳者能够对自身游泳状态进行精确调整,进一步提升了游泳者游泳过程中的总体安全性。
165.在一个实施例中,处理器还用于当目标游泳者处于危险运动状态时,将对应的全景拍摄图像,划分为感兴趣区域和非感兴趣区域,感兴趣区域包括至少一游泳者的人体轮廓信息;获取与目标游泳者距离最近的游泳者的人体轮廓信息;根据游泳者的人体轮廓信息,获取对应的人体关键点信息,人体关键点信息包括各个肢体关节的位置以及摆动幅度信息;根据人体关键点信息组合得到对应的人体姿态信息;将人体姿态信息输入至预设神经网络模型以判断游泳者的人体姿态信息是否符合预设人体姿态信息;若否,则生成提示信息以提醒目标游泳者。
166.此外,还提供一种可穿戴设备10,如图8所示,设置有上述智能监控装置200。
167.此外,还提供一种可读存储介质,可读存储介质存储有计算机程序,计算机程序在被处理器240执行时实施上述智能监控方法。
168.即,以上仅为本技术的实施例,并非因此限制本技术的专利范围,凡是利用本技术说明书及附图内容所作的等效结构或等效流程变换,例如各实施例之间技术特征的相互结合,或直接或间接运用在其他相关的技术领域,均同理包括在本技术的专利保护范围内。
169.另外,对于特性相同或相似的结构元件,本技术可采用相同或者不相同的标号进行标识。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个特征。在本技术的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
170.在本技术中,“例如”一词是用来表示“用作例子、例证或说明”。本技术中被描述为“例如”的任何一个实施例不一定被解释为比其它实施例更加优选或更加具优势。为了使本领域任何技术人员能够实现和使用本技术,本技术给出了以上描述。在以上描述中,为了解释的目的而列出了各个细节。
171.应当明白的是,本领域普通技术人员可以认识到,在不使用这些特定细节的情况下也可以实现本技术。在其它实施例中,不会对公知的结构和过程进行详细阐述,以避免不必要的细节使本技术的描述变得晦涩。因此,本技术并非旨在限于所示的实施例,而是与符合本技术所公开的原理和特征的最广范围相一致。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1