城市道路动态自动驾驶专用车道及其使用方法与流程
1.本发明涉及交通管理技术领域,特别涉及城市道路动态自动驾驶专用车道及其使用方法。
背景技术:
2.随着5g、云计算、大数据、物联网等新技术的发展,以及大众对智慧化美好生活的需要,行业内已普遍达成共识,自动驾驶会成为未来几十年的前瞻发展方向,加持最近新基建的重大利好,自动驾驶产业迎来了盛大机遇,产业链上下游各方争相布局谋划、研究测试。
3.然而,由于成本、技术等多方面原因,自动驾驶车辆还难以形成规模达到量产,未来城市道路上自动驾驶车辆的流量也难以确切估计,那么是否设置自动驾驶专用车道(以下简称专用道)则成为一大难点。
4.同等道路规模下若设置自动驾驶专用道,虽然能够有效保障自动驾驶车辆的安全、有效提升其通行效率、显著降低排放与油耗,但是由于专用道占用了大量的空间资源,若自动驾驶专用道利用率不高,则会加剧交通拥堵,增加社会车辆的平均延误。
5.若保持社会车辆的道路规模不变,增加自动驾驶专用道,用地、建设、运营等成本则会剧增,而且在自动驾驶车辆流量较小的情况下,投入产出比大幅降低。
6.因此,如何降低投入产出比,提高城市道路的通行效率及车道资源利用率成为本领域技术人员急需解决的技术问题。
技术实现要素:
7.有鉴于现有技术的上述缺陷,本发明提供城市道路动态自动驾驶专用车道及其使用方法,实现的目的是降低自动驾驶车辆的投入产出比,提高城市道路的通行效率。
8.为实现上述目的,本发明公开了城市道路动态自动驾驶专用车道,设置在城市道路的路网内;所述路网与自动驾驶车辆场库连接的起始出发点作为所述路网的入口设有入口检测器;
9.专用车道包括一个以上路段;
10.每两个相邻的所述路段之间均通过路口,即交叉口连接;
11.第一个所述路段设有初始路段可变信息标志,其余所述路段均设有路段可变信息标志;
12.每一所述路段均设有路段检测器、智能道钉和雷视一体机。
13.优选的,每一路段的路段检测器到相邻的下一所述路段的所述可变信息标志的距离s
rc
的计算公式如下:
[0014][0015]
其中,s
rc
为每一路段的路段检测器到相邻的下一所述路段的所述可变信息标志的
距离,单位为米,其值为在保证清空和保证换道中取大;
[0016]
lc为自动驾驶车辆av与前方社会车辆的清空距离,单位为米;
[0017]
maxva为行驶于专用道上的自动驾驶车辆av的最大车速,单位为米/秒;
[0018]
minvc为社会车辆的最小行驶速度,单位为米/秒;
[0019]
为社会车辆换道横向最大偏移距离,单位为米。
[0020]
优选的,所述初始路段可变信息标志包括三个可选位置;
[0021]
第一个所述可选位置需要满足专用车道上在前的自动驾驶车辆av以最小车速行驶时与在后的社会车辆以最大车速行驶时的距离≥清空距离;
[0022]
第二个所述可选位置即安全距离点,最靠近入口检测器的位置;
[0023]
第三个所述可选位置需要满足专用道上在前的社会车辆以最小车速行驶时与在后的自动驾驶车辆av以最大车速行驶时的距离≥安全距离,距离入口检测器的位置最远;
[0024]
计算公式如下:以所述专用车道的行车方向为x轴正方向,下述点位位置大小比较参照位于x轴的位置,沿x轴正方向,依次为第三个所述可选位置x3、第一个所述可选位置x1和第二个所述可选位置x2:
[0025]
当c点为检测到自动驾驶车辆av开始驶入后,经过所述初始路段可变信息标志所在位置进入所述专用车道的最后一辆社会车辆;
[0026]
a点为进入所述路网的所述自动驾驶车辆av;
[0027]
则
[0028][0029]
sv=sa∪sb;
[0030]
其中,sa为所述初始路段可变信息标志布设的可选点位a,且x1≤sa≤x2;
[0031]
sb为可变信息标志布设的可选点位b,且sb≤x3;
[0032]
sv为可变信息标志布设的可选位置;
[0033]
lc为所述自动驾驶车辆与前方社会车辆的清空距离,单位为米;
[0034]
ls为所述自动驾驶车辆与后方社会车辆的安全距离,单位为米;
[0035]
t为所述自动驾驶车辆从所述入口匝道检测器位置到汇入所述自动驾驶专用道的行驶时间,单位s;
[0036]
minvc为所述社会车辆的最小行驶速度,单位为米/秒;
[0037]
maxvc为所述社会车辆的最大行驶速度,单位为米/秒;
[0038]
为所述自动驾驶车辆以最大速度汇入至所述自动驾驶车道后,位于所述自动驾驶专用车道的位置;
[0039]
为所述自动驾驶车辆以最小速度汇入至所述自动驾驶车道后,位于所述自动驾驶专用车道的位置。
[0040]
本发明还提供城市道路动态自动驾驶专用车道的使用方法,包括如下步骤:
[0041]
步骤1、通过所述入口检测器检测自动驾驶车辆av是否驶入路网;
[0042]
若是,则所述初始可变信息标志显示专用车道禁止社会车辆驶入的文字或者图案,并开启相应的所述雷视一体机对驶入的所述社会车辆进行抓拍,启动所述智能道钉,通过所述智能道钉的闪亮提示在所述智能道钉的闪亮范围内的社会车辆立即驶离,并执行步
骤2;
[0043]
若否,所述初始可变信息标志显示专用车道允许所述社会车辆驶入的文字或者图案;
[0044]
所述雷视一体机和所述智能道钉均关闭,并重复执行步骤1;
[0045]
步骤2、通过第一个所述路段的所述路段检测器检测所述自动驾驶车辆av是否驶入相应所述路段,即是否驶入所述专用车道;
[0046]
若是,则对所述自动驾驶车辆av所在的所述路段的所述智能道钉的闪亮范围进行动态调整,禁止所述社会车辆驶入所述智能道钉的闪亮范围,同时通过相应所述路段的所述雷视一体机对驶入所述智能道钉的闪亮范围的所述社会车辆进行抓拍,并执行步骤3;
[0047]
若否,则重复执行步骤2;
[0048]
步骤3、每一所述路段的所述路段检测器均开启检测所述自动驾驶车辆av是否驶入相应的所述路段;
[0049]
若是,则对所述自动驾驶车辆av所在的所述路段的所述智能道钉的闪亮范围进行动态调整,并使相邻的下一个所述路段的所述路段可变信息标志显示专用车道禁止社会车辆驶入的文字或者图案,开启相邻的下一个所述路段的所述雷视一体机对驶入的所述社会车辆进行抓拍,启动相邻的下一个所述路段的所述智能道钉,通过所述智能道钉的闪亮提示在所述智能道钉的闪亮范围内的社会车辆立即驶离,调整所述自动驾驶车辆av所在的所述路段的前一个所述路段的所述初始可变信息标志或者所述可变信息标志显示专用车道允许所述社会车辆驶入的文字或者图案,并执行步骤4;
[0050]
若否,则重复执行步骤3;
[0051]
步骤4、最后一个所述路段的所述路段检测器检测所述自动驾驶车辆av是否驶出相应的所述路段,即是否驶出所述专用车道;
[0052]
若是,则所述初始路段可变信息标志和每一所述路段可变信息标志均显示专用车道允许所述社会车辆驶入的文字或者图案;所有所述智能道钉均关闭熄灭,所有所述雷视一体均关闭;
[0053]
否则,重复执行步骤4。
[0054]
优选的,所述智能道钉启动时闪亮的长度为计算公式如下
[0055][0056]
其中,为所述自动驾驶车辆以最大速度汇入至所述自动驾驶车道后,位于所述自动驾驶专用车道的位置;
[0057]
sv为可变信息标志布设的可选位置;
[0058]
lc为所述自动驾驶车辆与前方社会车辆的清空距离,单位为米。
[0059]
优选的,步骤1中,当所述社会车辆已在路口实线位置处排队无法驶离,则在下一路口出口道离开所述专用车道。
[0060]
优选的,所述智能道钉的闪亮范围进行动态调整的方法如下:
[0061]
自动驾驶车辆av与前方社会车辆的清空距离+自动驾驶车辆av长度+自动驾驶车辆与后方社会车辆的安全距离。
[0062]
优选的,所述智能道钉的闪亮范围进行动态调整的方法如下:
[0063]
将每一所述路段均按总长度等距分段,智能道钉闪亮范围为自动驾驶车辆av所在区域及满足安全距离和清空距离的区域。
[0064]
更优选的,所述清空距离lc的计算公式如下:
[0065][0066]
其中,为所述行驶于自动驾驶专用道上的所述自动驾驶车辆在反应时间内最大行驶距离,单位为米;
[0067]
为所述行驶于自动驾驶专用道上的所述自动驾驶车辆发现前车骤停所需最大安全制动距离,单位为米;
[0068]
为所述前方车辆在反应时间内最大行驶距离,单位为米;
[0069]
为所述前车发现后方来车时换道所需最大距离,单位为米;
[0070]
为所述行驶于自动驾驶专用道上的所述自动驾驶车辆的反应时间,单位为秒;
[0071]
maxva为所述行驶于自动驾驶专用道上的所述自动驾驶车辆的最大车速,单位为千米/小时;
[0072]
为所述行驶于自动驾驶专用道上的所述自动驾驶车辆的最小制动加速度,单位为米/秒2;
[0073]
为所述前车的最大反应时间,单位为秒;
[0074]
maxvf为所述前车的最大车速,单位为千米/小时;
[0075]
为所述前车换道横向最大偏移距离,单位为米。
[0076]
更优选的,所述安全距离ls的计算公式如下:
[0077][0078][0079][0080][0081]
其中,为所述后方车辆在反应时间内最大行驶距离,单位为米;
[0082]
为所述后方车辆发现所述行驶于自动驾驶专用道上的所述自动驾驶车辆时,换道所需最大距离,单位为米;
[0083]
为所述后方车辆发现所述行驶于自动驾驶专用道上的所述自动驾驶车辆骤停时,所需的最大安全制动距离,单位为米;
[0084]
为所述后车的最大反应时间,单位为秒;
[0085]
maxvr为所述后车的最大车速,单位为千米/小时;
[0086]
为所述后车换道横向最大偏移距离,单位为米;
[0087]
为所述后车的最小制动加速度,单位为米/秒2。
[0088]
本发明的有益效果:
[0089]
本发明通过合理设置动态自动驾驶专用道,降低投入产出比,提高城市道路的通行效率及车道资源利用率。
[0090]
以下将结合附图对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。
附图说明
[0091]
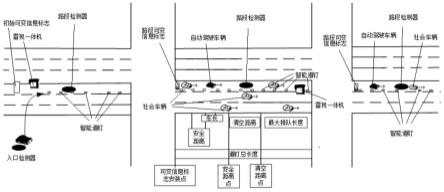
图1示出本发明一实施例的结构示意图。
[0092]
图2示出本发明一实施例的使用流程图。
[0093]
图3示出本发明一实施例中初始路段可变信息标志设置位置的示意图。
[0094]
图4示出本发明一实施例中智能道钉启动时闪亮的长度的示意图。
[0095]
图5示出本发明一实施例中智能道钉的闪亮范围进行动态调整的示意图。
具体实施方式
[0096]
实施例
[0097]
如图1所示,城市道路动态自动驾驶专用车道,设置在城市道路的路网内;路网与自动驾驶车辆场库连接的起始出发点作为路网的入口设有入口检测器;
[0098]
专用车道包括一个以上路段;
[0099]
每两个相邻的路段之间均通过路口,即交叉口连接;
[0100]
第一个路段设有初始路段可变信息标志,其余路段均设有路段可变信息标志;
[0101]
每一路段均设有路段检测器、智能道钉和雷视一体机。
[0102]
本发明在没有自动驾驶车辆行驶时,自动驾驶专用道对社会车辆开放,社会车辆可以在自动驾驶专用道上行驶;当自动驾驶车辆即将到来时,专用道内自动驾驶车辆前后方路段一定距离内禁止社会车辆进入,其他区域仍允许社会车辆通行。
[0103]
在实际应用中,能够通过动态自动驾驶专用道主要是通过入口检测器、初始可变信息标志、路段检测器、路段可变信息标志、智能道钉、雷视一体机、以及安全距离、清空距离的设置来保证自动驾驶车辆的安全快速通行。
[0104]
可变信息标志和初始可变信息标志的布设,主要是为了显示前方自动驾驶专用道路权是否对社会车辆开放,即通过显示信息的变化,提示后方社会车辆是否可以驶入专用道,当可变信息标志显示“x”时,标志后方社会车辆禁止驶入专用道;当可变信息标志显示特定方向绿箭头时,标志后方社会车辆可以遵守交通规则驶入专用道。
[0105]
可变信息标志的布设位置,则是为了实现当自动驾驶车辆汇入到专用道时,其前方清空距离、后方安全距离内没有社会车辆。
[0106]
路段可变信息标志原则上借杆安装。
[0107]
路段检测器则是为了检测相应路段是否有自动驾驶车辆av驶入。
[0108]
智能道钉用于提示专用车到的范围,并提示社会车辆离开专用车道。
[0109]
雷视一体机则用于抓拍在专用车道启用时未离开或者驶入的社会车辆。
[0110]
在某些实施例中,每一路段的路段检测器到相邻的下一路段的可变信息标志的距离s
rc
的计算公式如下:
[0111][0112]
其中,s
rc
为每一路段的路段检测器到相邻的下一路段的可变信息标志的距离,单位为米,其值为在保证清空和保证换道中取大;
[0113]
lc为自动驾驶车辆av与前方社会车辆的清空距离,单位为米;
[0114]
maxva为行驶于专用道上的自动驾驶车辆av的最大车速,单位为米/秒;
[0115]
minvc为社会车辆的最小行驶速度,单位为米/秒;
[0116]
为社会车辆换道横向最大偏移距离,单位为米。
[0117]
在实际应用中,每一路段检测器到下一路段的可变信息标志的距离s
rc
,需要保证自动驾驶车辆av以最快速度行驶到出口道,即下一路段的入口时,下一路段的前方的社会车辆已经驶离,或者在其清空距离外。临界情况是,可变信息标志转变时刻通过的最后一辆社会佘亮运行至动驾驶车辆av的清空距离或已换道离开专用道。
[0118]
如图3所示,在某些实施例中,初始路段可变信息标志包括三个可选位置;
[0119]
第一个可选位置需要满足专用车道上在前的自动驾驶车辆av以最小车速行驶时与在后的社会车辆以最大车速行驶时的距离≥清空距离;
[0120]
第二个可选位置即安全距离点,最靠近入口检测器的位置;
[0121]
第三个可选位置需要满足专用道上在前的社会车辆以最小车速行驶时与在后的自动驾驶车辆av以最大车速行驶时的距离≥安全距离,距离入口检测器的位置最远;
[0122]
计算公式如下:以专用车道的行车方向为x轴正方向,下述点位位置大小比较参照位于x轴的位置,沿x轴正方向,依次为第三个可选位置x3、第一个可选位置x1和第二个可选位置x2:
[0123]
当c点为检测到自动驾驶车辆av开始驶入后,经过初始路段可变信息标志所在位置进入专用车道的最后一辆社会车辆;
[0124]
a点为进入路网的自动驾驶车辆av;
[0125]
则
[0126][0127]
sv=sa∪sb;
[0128]
其中,sa为初始路段可变信息标志布设的可选点位a,且x1≤sa≤x2;
[0129]
sb为可变信息标志布设的可选点位b,且sb≤x3;
[0130]
sv为可变信息标志布设的可选位置;
[0131]
lc为自动驾驶车辆与前方社会车辆的清空距离,单位为米;
[0132]
ls为自动驾驶车辆与后方社会车辆的安全距离,单位为米;
[0133]
t为自动驾驶车辆从入口匝道检测器位置到汇入自动驾驶专用道的行驶时间,单位s;
[0134]
minvc为社会车辆的最小行驶速度,单位为米/秒;
[0135]
maxvc为社会车辆的最大行驶速度,单位为米/秒;
[0136]
为自动驾驶车辆以最大速度汇入至自动驾驶车道后,位于自动驾驶专用车道的位置;
[0137]
为自动驾驶车辆以最小速度汇入至自动驾驶车道后,位于自动驾驶专用车道的位置。
[0138]
如图2所示,本发明还提供的城市道路动态自动驾驶专用车道的使用方法,包括如下步骤:
[0139]
步骤1、通过入口检测器检测自动驾驶车辆av是否驶入路网;
[0140]
若是,则初始可变信息标志显示专用车道禁止社会车辆驶入的文字或者图案,并开启相应的雷视一体机对驶入的社会车辆进行抓拍,启动智能道钉,通过智能道钉的闪亮提示在智能道钉的闪亮范围内的社会车辆立即驶离,并执行步骤2;
[0141]
若否,初始可变信息标志显示专用车道允许社会车辆驶入的文字或者图案;
[0142]
雷视一体机和智能道钉均关闭,并重复执行步骤1;
[0143]
步骤2、通过第一个路段的路段检测器检测自动驾驶车辆av是否驶入相应路段,即是否驶入专用车道;
[0144]
若是,则对自动驾驶车辆av所在的路段的智能道钉的闪亮范围进行动态调整,禁止社会车辆驶入智能道钉的闪亮范围,同时通过相应路段的雷视一体机对驶入智能道钉的闪亮范围的社会车辆进行抓拍,并执行步骤3;
[0145]
若否,则重复执行步骤2;
[0146]
步骤3、每一路段的路段检测器均开启检测自动驾驶车辆av是否驶入相应的路段;
[0147]
若是,则对自动驾驶车辆av所在的路段的智能道钉的闪亮范围进行动态调整,并使相邻的下一个路段的路段可变信息标志显示专用车道禁止社会车辆驶入的文字或者图案,开启相邻的下一个路段的雷视一体机对驶入的社会车辆进行抓拍,启动相邻的下一个路段的智能道钉,通过智能道钉的闪亮提示在智能道钉的闪亮范围内的社会车辆立即驶离,调整自动驾驶车辆av所在的路段的前一个路段的初始可变信息标志或者可变信息标志显示专用车道允许社会车辆驶入的文字或者图案,并执行步骤4;
[0148]
若否,则重复执行步骤3;
[0149]
步骤4、最后一个路段的路段检测器检测自动驾驶车辆av是否驶出相应的路段,即是否驶出专用车道;
[0150]
若是,则初始路段可变信息标志和每一路段可变信息标志均显示专用车道允许社会车辆驶入的文字或者图案;所有智能道钉均关闭熄灭,所有雷视一体均关闭;
[0151]
否则,重复执行步骤4。
[0152]
本发明在实际应用中的工作流程如下:
[0153]
当自动驾驶车辆av进入城市道路的路网,逐渐通过换道汇入专用车道,但需考虑临界情况,即由于相邻社会车辆的交织,社会车辆无法尽快驶离专用道,因此需要通过可变信息标志的布设位置规避这一情况,从而确保自动驾驶车辆的运行安全。当自动驾驶车辆av进入任一路段时,前一个路段的初始可变信息标志或者可变信息标志取消显示x,暗掉或者显示特定方向绿箭头。
[0154]
当自动驾驶车辆av在专用道上正常行驶,前后一定范围内智能道钉随自动驾驶车
辆av的位置变化而动态闪亮,雷视一体机对驶入道钉闪亮范围的社会车辆进行违法抓拍。
[0155]
当上一个路段的路段检测器检测到自动驾驶车辆av到达时,下一个路段的路段可变信息标志由允许特定方向社会车辆通行转变为显示“社会车辆x”,同时出口道智能道钉闪亮,提醒社会车辆禁止进入且道钉范围内的社会车辆尽快驶离。
[0156]
每一路段检测器到路段可变信息标志的距离,需要保证自动驾驶车辆av以最快速度行驶到出口道时,专用道上其前方的社会车辆已经驶离,或者在其清空距离外。当自动驾驶车辆av通过出口道路段可变信息标志后,可变信息标志由显示“社会车辆x”恢复显示允许特定方向社会车辆通行。
[0157]
档自动驾驶车辆av驶离,恢复社会车辆正常行驶,每一路段可变信息标志均显示允许社会车辆通行的固定方向,雷视一体机不抓拍,智能道钉不闪亮。
[0158]
如图4所示,在某些实施例中,智能道钉启动时闪亮的长度为计算公式如下
[0159][0160]
其中,为自动驾驶车辆以最大速度汇入至自动驾驶车道后,位于自动驾驶专用车道的位置;
[0161]
sv为可变信息标志布设的可选位置;
[0162]
lc为自动驾驶车辆与前方社会车辆的清空距离,单位为米。
[0163]
在实际应用中,智能道钉的闪亮主要实现两个目的:专用道上既有社会车辆立刻驶离、相邻车辆社会车辆禁止驶入。
[0164]
智能道钉初始闪亮长度,是为了保证自动驾驶车辆av从外侧车道换道至最内侧的自动驾驶专用道时,其前后方一定距离内无社会车辆。自动驾驶车辆av驶入后,前后区段道钉都会闪亮,后续则可以保证社会车辆驶离,难点主要在于初始闪亮长度的确定。由于实际城市道路交通环境中,车辆交织、行驶轨迹等多重因素的影响,自动驾驶车辆可能会存在多个汇入点,为保证足够安全,初始闪亮长度主要部分应为可变信息标志到自动驾驶车辆av驶入专用道可能汇入点的最大距离,还应包含自动驾驶车辆与前方车辆的清空距离。
[0165]
在某些实施例中,步骤1中,当所述社会车辆已在路口实线位置处排队无法驶离,则在下一路口出口道离开专用车道。
[0166]
在某些实施例中,智能道钉的闪亮范围进行动态调整的方法如下:
[0167]
自动驾驶车辆av与前方社会车辆的清空距离+自动驾驶车辆av长度+自动驾驶车辆与后方社会车辆的安全距离。
[0168]
在某些实施例中,智能道钉的闪亮范围进行动态调整的方法如下:
[0169]
将每一路段均按总长度等距分段,智能道钉闪亮范围为自动驾驶车辆av所在区域及满足安全距离和清空距离的区域。
[0170]
如图5所示,在某些实施例中,自动驾驶车辆av在f区行驶,则efgh四区的智能道钉闪亮。
[0171]
在实际应用中,智能道钉的动态闪亮,是为了实现清空距离和安全距离内没有社会车辆。随着自动驾驶车辆在专用道行驶过程中的位置变化,智能道钉的闪亮范围也需动态调整。
[0172]
前一种动态调整的精确度高,但对检测手段、控制手段和设备协同联动要求较高,
相比而言后一中动态调整方法更具有可操作性。这两种方法均可通过雷视一体机+智能道钉的控制器协同控制实现。
[0173]
在某些实施例中,清空距离lc的计算公式如下:
[0174][0175]
其中,为行驶于自动驾驶专用道上的自动驾驶车辆在反应时间内最大行驶距离,单位为米;
[0176]
为行驶于自动驾驶专用道上的自动驾驶车辆发现前车骤停所需最大安全制动距离,单位为米;
[0177]
为前方车辆在反应时间内最大行驶距离,单位为米;
[0178]
为前车发现后方来车时换道所需最大距离,单位为米;
[0179]
为行驶于自动驾驶专用道上的自动驾驶车辆的反应时间,单位为秒;
[0180]
maxva为行驶于自动驾驶专用道上的自动驾驶车辆的最大车速,单位为千米/小时;
[0181]
为行驶于自动驾驶专用道上的自动驾驶车辆的最小制动加速度,单位为米/秒2;
[0182]
为前车的最大反应时间,单位为秒;
[0183]
maxvf为前车的最大车速,单位为千米/小时;
[0184]
为前车换道横向最大偏移距离,单位为米。
[0185]
在实际应用中,清空距离l
clear
代数符号并不相同请确认统一用哪个代数符号是前方社会车辆应与后方自动驾驶车辆所保持的距离,主要保证自动驾驶车辆在其专用道稳定运行。清空距离的设置长度对专用道的利用率有着重要的影响,当清空距离过长时,清空时间较大,则动态自动驾驶车辆专用道对社会车辆开放的时间较短,整体车道利用率不高;当清空距离过短时,清空时间小于前方社会车辆排队消散时间,则会对自动驾驶车辆造成延误,无法实现自动驾驶车辆优先,因此,清空距离的设置长度是决定动态自动驾驶专用道利用率的关键因素。
[0186]
清空距离应由前后车安全距离和前车换道所需距离组成,即自动驾驶车辆需始终与前车保证安全车距,保证前车的减速、骤停、换道等行为不会对自动驾驶车辆的运行造成影响。同时,前车发现自动驾驶车辆在后方一定距离时,应开始向非自动驾驶专用道变道。
[0187]
进一步的,需要考虑前车换道时的交织行为,即前车想换道但由于相邻车道社会车辆的影响无法及时换道,换道时间取试验最大值10s。
[0188]
在某些实施例中,安全距离ls的计算公式如下:
[0189][0190]
[0191][0192][0193]
其中,为后方车辆在反应时间内最大行驶距离,单位为米;
[0194]
为后方车辆发现行驶于自动驾驶专用道上的自动驾驶车辆时,换道所需最大距离,单位为米;
[0195]
为后方车辆发现行驶于自动驾驶专用道上的自动驾驶车辆骤停时,所需的最大安全制动距离,单位为米;
[0196]
为后车的最大反应时间,单位为秒;
[0197]
maxvr为后车的最大车速,单位为千米/小时;
[0198]
为后车换道横向最大偏移距离,单位为米;
[0199]
为后车的最小制动加速度,单位为米/秒2。
[0200]
在实际应用中,安全距离ls即自动驾驶车辆与后方社会车辆的距离。足够的长度,保证自动驾驶车辆的减速、骤停等行为不会对后方车辆的运行造成影响,安全距离除包括反应时间对应的距离+安全制动距离外,考虑到后方社会车辆sv可能比自动驾驶车辆av快,安全距离还应包括后方社会车辆sv换道所需距离。
[0201]
以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思做出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1