一种抑制隧道入口区域交通流负效应的网联动车控制方法
1.本发明涉及智慧交通技术领域,特别涉及一种抑制隧道入口区域混合交通流负效应的方法。
背景技术:
2.目前,已有很多具有高级辅助驾驶系统的网联自动车发售,网联自动车具有自身的辅助传感器、先进的控制器和执行器,包括视频、微波、毫米波和激光雷达等,能够在一定情况下实现车辆的自适应辅助驾驶,并且可以通过车辆、路边基础设施和云平台进行实时通信,能实时的获取周围车辆的信息数据,实现数据共享,提高交通系统的安全性、效率、舒适性和便利性。
3.隧道入口区域由于其特殊的行车环境,导致事故频发。在该区域,一旦出现车辆事故或道路封闭,容易出现交通瓶颈导致交通拥堵,从而造成资源的浪费。目前的研究,大多是针对快速路的上下匝道及隧道路口等固定性瓶颈。申请号为202111323636.6的中国专利一种路网瓶颈路段发掘与管理方法及装置,其通过计算流量速率变化值,通过广播发布和信号灯对车流进行分流,但是该方法在隧道入口区域并不适用。申请号为202010365243.0的中国专利基于车路协同的上匝道协同并道控制方法,其采用事件触发切换控制机制,对上匝道汇流区网联自动车进行控制,在保证安全的同时提高了通行效率。以上研究主要针对于汇流区的瓶颈进行控制调节,并未考虑隧道入口区域这类特殊的瓶颈负效应。
技术实现要素:
4.有鉴于此,本发明的目的是提供一种抑制隧道入口区域交通流负效应的网联动车控制方法,以解决隧道入口区域瓶颈对混合交通流负面影响的技术问题。
5.本发明抑制隧道入口区域交通流负效应的网联动车控制方法包括以下步骤:
6.步骤1:以隧道入口处为起点向上游选择一段长度为s的区域;
7.步骤2:构建车辆运动学模型,网联自动车服从二阶动力学模型:
[0008][0009]
其中a(t)为车辆的加速度;
[0010]
步骤3:网联自动车利用通信感知设备每隔0.1秒-0.8秒感知控制区域内车的位置和速度,并对车道从右至左依次编号为1~n,路网中的网联自动车判断当前自己所处的车道,如果处于车道1,转到步骤4,如果处于车道n,转到步骤9,否则转到步骤5;
[0011]
步骤4:网联自动车判断左前方车辆的车辆类别,若存在车辆且车辆类型为网联自动车则转到步骤8,否则转到步骤6;
[0012]
步骤5:判断左前方车辆与右前方车辆的车辆类别,若均为网联自动车,则分别计算与左车道前方网联自动车的纵向距离d
l1
及与右车道前方网联自动车的纵向距离d
r1
,若d
l1
<d
r1
转到步骤6,若d
l1
≥d
r1
转到步骤7;若均为人驾车则转到步骤13;若左车道车辆为网联自动车,右车道车辆为人驾车,则转向步骤6;若右车道车辆为网联自动车,左车道车辆为
人驾车,则转向步骤7;
[0013]
步骤6:判断前方车辆的车辆类别,若为网联自动车则转到步骤11;否则转到步骤8;
[0014]
步骤7:判断前方车辆的车辆类别,若为网联自动车则转到步骤12;否则转到步骤10;
[0015]
步骤8:计算与左车道前方网联自动车的纵向距离d
l1
,计算车辆的安全换道距离d
l
,左车道前方网联自动车车速为v
l
,本车车速为ve,安全跟驰车速为v
safe
,车道最低限速为v
limit
,车辆的最大减速度为b
max
,g
min
为安全跟车距离,计算与左车道前车的安全换道距离:
[0016]dl
=s
l-se+l+g
min
[0017]
其中
[0018][0019][0020]
若d
l1
<d
l
,则不进行速度以及换道调整,否则进行速度调整,取v1=max(v
l
,ve)将设本车的期望速度设为min(v
safe
,v
limit
,v1+1);
[0021]
步骤9:网联自动车判断右前方车辆的车辆类别,若存在车辆且车辆类型为网联自动车则转到步骤7,否则转到步骤9;
[0022]
步骤10:计算与右前方车辆的纵向距离d
r1
,并计算车辆的安全换道距离dr,右车道前方网联自动车车速为vr,本车车速为ve,安全跟驰车速为v
safe
,车道最低限速为v
limit
,车辆的最大减速度为b
max
,g
min
为安全跟车距离,计算与右前方前车的安全换道距离:
[0023]dr
=s
r-se+l+g
min
[0024]
其中
[0025][0026][0027]
若d2<dr,则不进行速度以及换道调整,否则进行速度调整,将设本车的期望速度设为min(v
safe
,v
limit
,v1+1);
[0028]
步骤11:计算与右车道前方车辆安全换道间隙d
rl
以及右车道后方车辆的安全换道间隙d
rf
:
[0029]drl
=s
rl-s
re
+l+g
min
[0030]
计算与最优车道后车的安全换道距离:
[0031]drf
=s
re-s
rf
+l+g
min
[0032]
其中
[0033][0034][0035][0036]vl
、ve、vf分别为右车道前车车速,本车车速,右车道后车车速,b
max
为车辆的最大减速度,d
rf
>0,d
rl
>0时,则向右进行换道,否则转到步骤13;
[0037]
步骤12:计算与左车道前车安全换道间隙d
ll
以及左车道后车的安全换道间隙d
lf
:
[0038]dll
=s
ll-s
le
+l+g
min
[0039]
计算与左车道后车的安全换道距离:
[0040]dlf
=s
le-s
lf
+l+g
min
[0041]
其中
[0042][0043][0044][0045]vl
、ve、vf分别为右车道前车车速,本车车速,右车道后车车速,b
max
为车辆的最大减速度,d
lf
>0,d
ll
>0时,则向右进行换道,否则转到步骤13;
[0046]
步骤13:正常行驶,不进行纵向速度调整与换道调整。
[0047]
本发明的有益效果:
[0048]
本发明中抑制隧道入口区域交通流负效应的网联动车控制方法,其综合考虑了网联自动车周围的所有车辆信息,为网联自动车的速度调整以及换道提供了数据基础;本发明根据每辆网联自动车的状态采用不同的换道算法,既能保证跟驰换道安全,又能抑制该区域的负效应影响。
附图说明
[0049]
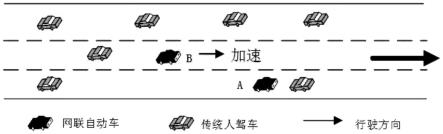
图1是隧道入口区域网联自动车纵向速度调整示意图;
[0050]
图2是隧道入口区域网联自动车换道示意图。
具体实施方式
[0051]
下面结合附图和实施例对本发明作进一步描述。
[0052]
如图所示,本实施例中抑制隧道入口区域交通流负效应的网联动车控制方法包括以下步骤:
[0053]
步骤1:以隧道入口处为起点向上游选择一段长度为s的区域;本实施例中选取s=3km。
[0054]
步骤2:构建车辆运动学模型,网联自动车服从二阶动力学模型:
[0055][0056]
其中a(t)为车辆的加速度;
[0057]
步骤3:网联自动车利用通信感知设备每隔0.1秒-0.8秒感知控制区域内车的位置和速度,并对车道从右至左依次编号为1~n,n的值根据车道具体情况确定,本实施例中车道从右至左依次编号具体为1、2和3;路网中的网联自动车判断当前自己所处的车道,如果处于车道1,转到步骤4,如果处于车道3,转到步骤9,否则转到步骤5。
[0058]
步骤4:网联自动车判断左前方车辆的车辆类别,若存在车辆且车辆类型为网联自动车则转到步骤8,否则转到步骤6。
[0059]
步骤5:判断左前方车辆与右前方车辆的车辆类别,若均为网联自动车,则分别计算与左车道前方网联自动车的纵向距离d
l1
及与右车道前方网联自动车的纵向距离d
r1
,若d
l1
<d
r1
转到步骤6,若d
l1
≥d
r1
转到步骤7;若均为人驾车则转到步骤13;若左车道车辆为网
联自动车,右车道车辆为人驾车,则转向步骤6;若右车道车辆为网联自动车,左车道车辆为人驾车,则转向步骤7。
[0060]
步骤6:判断前方车辆的车辆类别,若为网联自动车则转到步骤11;否则转到步骤8。
[0061]
步骤7:判断前方车辆的车辆类别,若为网联自动车则转到步骤12;否则转到步骤10。
[0062]
步骤8:计算与左车道前方网联自动车的纵向距离d
l1
,计算车辆的安全换道距离d
l
,左车道前方网联自动车车速为v
l
,本车车速为ve,安全跟驰车速为v
safe
,车道最低限速为v
limit
,车辆的最大减速度为b
max
,g
min
为安全跟车距离,计算与左车道前车的安全换道距离:
[0063]dl
=s
l-se+l+g
min
[0064]
其中
[0065][0066][0067]
若d
l1
<d
l
,则不进行速度以及换道调整,否则进行速度调整,取v1=max(v
l
,ve)将设本车的期望速度设为min(v
safe
,v
limit
,v1+1)。
[0068]
步骤9:网联自动车判断右前方车辆的车辆类别,若存在车辆且车辆类型为网联自动车则转到步骤7,否则转到步骤9。
[0069]
步骤10:计算与右前方车辆的纵向距离d
r1
,并计算车辆的安全换道距离dr,右车道前方网联自动车车速为vr,本车车速为ve,安全跟驰车速为v
safe
,车道最低限速为v
limit
,车辆的最大减速度为b
max
,g
min
为安全跟车距离,计算与右前方前车的安全换道距离:
[0070]dr
=s
r-se+l+g
min
[0071]
其中
[0072][0073][0074]
若d2<dr,则不进行速度以及换道调整,否则进行速度调整,将设本车的期望速度设为min(v
safe
,v
limit
,v1+1)。
[0075]
步骤11:计算与右车道前方车辆安全换道间隙d
rl
以及右车道后方车辆的安全换道间隙d
rf
:
[0076]drl
=s
rl-s
re
+l+g
min
[0077]
计算与最优车道后车的安全换道距离:
[0078]drf
=s
re-s
rf
+l+g
min
[0079]
其中
[0080][0081][0082][0083]vl
、ve、vf分别为右车道前车车速,本车车速,右车道后车车速,b
max
为车辆的最大减速度,d
rf
>0,d
rl
>0时,则向右进行换道,否则转到步骤13。
[0084]
步骤12:计算与左车道前车安全换道间隙d
ll
以及左车道后车的安全换道间隙d
lf
:
[0085]dll
=s
ll-s
le
+l+g
min
[0086]
计算与左车道后车的安全换道距离:
[0087]dlf
=s
le-s
lf
+l+g
min
[0088]
其中
[0089][0090][0091][0092]vl
、ve、vf分别为右车道前车车速,本车车速,右车道后车车速,b
max
为车辆的最大减速度,d
lf
>0,d
ll
>0时,则向右进行换道,否则转到步骤13。
[0093]
步骤13:正常行驶,不进行纵向速度调整与换道调整。
[0094]
最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1