一种基于手机信令数据的城市居民交通出行方式识别方法
1.本发明属于交通出行方式识别领域,具体涉及一种基于手机信令数据的城市居民交通出行方式识别方法。
背景技术:
2.通过对居民个体出行方式的调查研究,掌握不同时间、地点的居民出行方式及出行时间等特征信息,一方面可以直接指导城市交通规划,辅助交通决策,有利于制定合理的交通规划方案,优化城市路网结构和交通设施布局。另一方面,有助于交通管理部门合理引导居民选择最佳的出行方式,有效调控城市车流、人流,减少交通拥堵问题的发生。
3.传统的居民出行方式信息主要通过入户调查(face to face)、问卷调查以及计算机辅助电话调查(cati)等方式获取。但是这些方式受被调查人个人主观认知的影响很大,问卷回收率和收集的数据质量都比较低,同时,需要耗费大量的人力物力和财力。
4.随着计算机技术、信息与通信技术等现代技术的快速发展,通过手机信令数据来进行个体出行方式的识别成为可能。手机信令数据采集过程简单、便于大规模获取、生成规则统一、实时性好,在人群活动特征分析、居民出行行为分析以及个体出行交通方式识别等方面有及其广泛的应用。
5.已有的利用手机信令数据来进行城市居民交通出行方式识别的技术,主要可分为基于规则的判别方法、基于机器学习的方法。其中,基于规则的判别方法,例如公开号为cn106197458b、cn105117789a等专利,根据专家的先验知识指定识别规则,识别容易受研究者个人主观因素影响,通常准确率较低。基于机器学习的方法,如公开号为cn112511971a、cn111653096等专利,需要大量的标记样本用于模型的训练,往往存在标记样本获取难度大,模型精度易受样本质量的影响,小数据集模型训练精度不高且易出现过拟合现象等问题。
技术实现要素:
6.发明目的:针对当前基于手机信令数据的城市居民出现方式识别方法过于简单、没有结合多源数据、识别精度不高等方面的不足,提供一种基于手机信令数据的城市居民交通出行方式识别方法,其充分考虑了不同交通方式各自的特征和差异构建了适合手机信令数据的交通出行方式识别的隶属度函数,并结合了路网、导航等多源数据,制定了不确定移动段出行方式的识别规则,实现了对步行、自行车、公交、小汽车四种交通方式的识别,有效提高了基于手机信令数据的个体交通方式识别精度。
7.技术方案:为实现上述目的,本发明提供一种基于手机信令数据的城市居民交通出行方式识别方法,包括如下步骤:
8.s1:对获取的手机信令数据进行预处理,剔除数据中的漂移点和重复记录;
9.s2:通过smuot算法对预处理后的手机信令数据进行移动段和停留段的划分,构建出行行程链;
10.s3:构建各种交通出行方式的隶属度函数;
11.s4:根据隶属度函数计算出每种出行方式的综合隶属度得分,并通过综合隶属度得分阈值,将步骤s2获得的移动段进一步划分为确定移动段和不确定移动段;
12.综合隶属度得分阈值用于将移动段划分为确定移动段和不确定移动段,具体数值由多次试验得出,在0.7时能够获得较好的识别精度;
13.s5:分别对确定移动段和不确定移动段的出行方式进行识别。
14.进一步地,所述步骤s1中预处理的过程为:
15.a1:据获取的手机信令数据的经纬度、时间戳字段,计算相邻轨迹点之间的速度,将速度大于设定值的漂移点剔除;
16.a2:将手机信令数据中同一时间的重复、错误记录进行剔除。
17.进一步地,所述步骤s2中出行行程链的构建方法为:
18.在对居民个体的出行轨迹进行停留段和移动段的识别后,将表示停留状态的连续轨迹点组合成停留段sk={p1,p2,p3,...,pi},k表示出行链中的第k个停留段,i表示停留段中轨迹点数量,0≤i≤m;
19.将表示移动状态的连续轨迹点组合成移动段m
l
={p1,p2,...,pj},l表示出行链中的第l个移动段,j表示移动段中轨迹点的数量,0≤j≤m;
20.移动段和停留段交替构成居民个体的出行链t={s1,m1,s2,m2…
,sn},n表示第n个停留段或者移动段。
21.进一步地,所述步骤s3中交通出行方式包括步行、自行车、公交、小汽车四种交通方式,所述隶属度函数包括出行距离隶属度函数、出行时长隶属度函数、出行速度隶属度函数。
22.进一步地,所述步骤s4中综合隶属度得分的计算方式为:将计算的每个移动段的移动距离、移动时长、平均移动速度作为自变量分别输入到出行距离隶属度函数、出行时长隶属度函数、出行速度隶属度函数,得到每种出行方式的出行距离隶属度、出行时长隶属度和出行平均速度隶属度,并将三者相乘得到综合隶属度得分。
23.进一步地,所述步骤s4中确定移动段和不确定移动段的划分方式为:将综合隶属度得分小于综合隶属度得分阈值的出行段划分为不确定移动段,将综合隶属度得分超过综合隶属度得分阈值的出行段划分为确定移动段,并将对应的出行方式作为该确定移动段的出行方式。
24.进一步地,所述步骤s5中确定移动段的出行方式识别方法为:将综合隶属度得分最高的出行方式作为最终识别的出行方式。
25.进一步地,所述步骤s5中通过停车频率约束、高速轨迹点占比约束、平均方位角变化约束、时间范围约束、导航时间相似度约束这五个约束条件来实现对不确定移动段出行方式的识别,具体为:
26.b1:根据停车频率约束识别不确定移动段:计算不确定移动段的停车频率,将停车频率大于规定阈值的识别为公交出行;
27.b2:根据高速轨迹点占比约束识别不确定移动段:计算不确定移动段中高速轨迹点占比,将占比大的不确定移动段识别为小汽车出行;
28.b3:根据平均方位角变化约束识别不确定移动段:将平均方位角变化大于阈值的
不确定移动段出行方式识别为步行;
29.b4:根据时间范围约束识别不确定移动段:将晚间及凌晨期间不确定移动段公交出行概率设置为零,即排除居民晚间及凌晨的公交出行;
30.b5:根据导航时间相似度约束识别不确定移动段:对于使用前四种约束规则都无法识别的不确定移动段,则计算其导航时间相似度以此来判断其出行方式,使用高德地图导航平台api接口,将对应的移动轨迹数据输入可获取平台规划的公交、小汽车、步行、自行车等出行方式的预期花费时间,根据获取的导航预期花费时间与实际花费时间计算导航时间相似度,将导航时间相似度最大的交通方式作为对应不确定移动段的出行方式。
31.有益效果:本发明与现有技术相比,充分考虑了不同交通方式各自的特征和差异构建了适合手机信令数据的交通出行方式识别的隶属度函数,并结合了路网、导航等多源数据,制定了不确定移动段出行方式的识别规则,实现了对步行、自行车、公交、小汽车四种交通方式的识别,有效提高了基于手机信令数据的个体交通方式识别精度。
附图说明
32.图1为本发明的基本原理图;
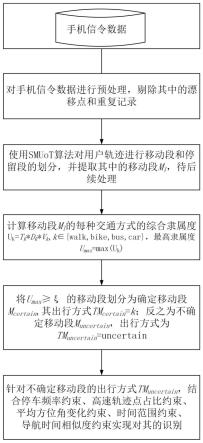
33.图2为本发明的工作流程图;
34.图3为本发明中居民个体出行行程链示意图;
35.图4为本发明中应用隶属度函数进行确定移动段和不确定移动段划分过程示意图;
36.图5为本发明中的移动段轨迹点方位角示意图。
具体实施方式
37.下面结合附图和具体实施例,进一步阐明本发明,应理解这些实施例仅用于说明本发明而不用于限制本发明的范围,在阅读了本发明之后,本领域技术人员对本发明的各种等价形式的修改均落于本技术所附权利要求所限定的范围。
38.本发明提供一种基于手机信令数据的城市居民交通出行方式识别方法,如图1和图2所示,包括如下步骤:
39.s1:对获取的手机信令数据进行预处理:
40.a1:根据获取的某一城市居民个体的出行轨迹,主要包含用户id、基站经纬度、时间戳等字段,计算相邻轨迹点之间的速度,将速度大于120km/h的漂移点剔除;
41.a2:将手机信令数据中同一时间的重复、字段不全等错误记录进行剔除。
42.本发明中居民个体的一次出行轨迹traj={p1,p2,p3,...,pm},1≤m≤m(m表示轨迹点总数量,pm表示第m个轨迹点)由一系列手机定位数据记录点p构成,p=《userid,time,longitude,latitude》为一个四元组,其中userid表示居民个体编号,time表示居民个体被定位的时间,longitude和latitude表示定位时用户手机连接的基站经纬度。
43.s2:通过smuot算法对预处理后的手机信令数据进行移动段m
l
和停留段sk的划分,构建出行行程链,并且提取出移动段m
l
:
44.居民个体在出行过程中包括两种状态,停留和移动,在对居民个体的出行轨迹进行停留段和移动段的识别后,将表示停留状态的连续轨迹点组合成停留段sk={p1,p2,
p3,...,pi},k表示出行链中的第k个停留段,i表示停留段中轨迹点数量,0≤i≤m;
45.将表示移动状态的连续轨迹点组合成移动段m
l
={p1,p2,...,pj},l表示出行链中的第l个移动段,j表示移动段中轨迹点的数量,0≤j≤m;
46.移动段和停留段交替构成居民个体的出行行程链t={s1,m1,s2,m2…
,sn},n表示第n个停留段或者移动段,出行行程链t具体如图3所示。
47.s3:构建各种交通出行方式的隶属度函数:
48.本发明中交通出行方式包括步行、自行车、公交、小汽车四种交通方式,具体如下表1~表3:
49.表1:不同出行方式的常见出行距离
[0050][0051]
表2:不同出行方式的常见出行时长
[0052][0053]
表3:不同出行方式的常见出行速度
[0054][0055]
根据上述的关于不同出行方式的出行距离、出行时长、出行速度的先验知识分别构建与步行、自行车、公交、小汽车对应的出行距离隶属度函数、出行时长隶属度函数、出行速度隶属度函数,具体如下表4:
[0056]
表4:不同出行方式各属性对应的隶属度函数
[0057]
[0058][0059]
s4:根据隶属度函数计算出每种出行方式的综合隶属度得分,并通过综合隶属度得分阈值,将步骤s2获得的移动段进一步划分为确定移动段和不确定移动段:
[0060]
确定移动段和不确定移动段的具体解释如下:
[0061]
本发明通过手机信令数据识别居民交通出行方式,因此只需要考虑移动段的居民出行方式;通过隶属度函数的计算将最终隶属度得分高于阈值δ的出行段划分为出行方式确定移动段m
certain
,简称确定移动段,确定移动段所对应的交通出行方式为tm
certain
;将隶属度得分低于δ的出行段划分为出行方式不确定移动段m
uncertain
,简称不确定移动段,不确定移动段所对应的交通出行方式为tm
unertain
。不确定移动段在本发明中属于一种过度性轨迹段,仅借助本发明构建的出行时长隶属度函数、出行距离隶属度函数、出行速度隶属度函数并不能直接识别其交通出行方式。
[0062]
综合隶属度得分的计算方式为:将计算的每个移动段的移动距离、移动时长、平均移动速度作为自变量分别输入到出行距离隶属度函数、出行时长隶属度函数、出行速度隶属度函数,得到每种出行方式的出行距离隶属度、出行时长隶属度和出行平均速度隶属度,并将三者相乘得到综合隶属度得分。
[0063]
参照图4,确定移动段和不确定移动段的划分过程为:首先,获取某一移动段,根据表4中的隶属度函数,计算移动段每种出行方式对应的综合隶属度得分uk,接着根据uk得到
最高隶属度得分u
max
,最后将u
max
超过阈值δ=0.7的移动段判定为确定移动段m
certain
,反之为不确定移动段m
uncertain
。
[0064]umax
和uk计算公式如下:
[0065]umax
=max(uk),k∈{walk,bike,bus,car}
ꢀꢀ
(1)
[0066]
uk=tk*dk*vk,k∈{walk,bike,bus,car}
ꢀꢀ
(2)
[0067]
式中,tk,dk,vk分别表示交通方式为k时所计算的时间隶属度得分,距离隶属度得分,速度隶属度得分,具体公式可参考表4。
[0068]
s5:对确定移动段m
certain
出行方式识别;令确定移动段的出行方式tm
certain
=k,即将确定移动段最高隶属度得分u
max
所对应的交通方式k作为确定移动段的交通出行方式。
[0069]
对不确定移动段m
uncertain
的出行方式识别:
[0070]
不确定移动段和确定移动段将构成多种用户换乘方式组合,比如小汽车-不确定移动段-小汽车、公交-不确定移动段、自行车-不确定移动段-自行车等,本发明结合用户出行方式选择规律和出行方式换乘特征提出如下规则来辅助不确定移动段m
uncertain
出行方式的识别:
[0071]
规则1:停车频率约束。
[0072]
公交出行与其他出行一个非常显著的区别就是,公交出行由于存在大量的公交站点,存在大量的乘客上下车行为,那么此时公交出行的停车频率会相交其他出行方式有较大增长,因此本发明将停车频率大于0.8的出行方式不确定移动段的出行方式tm
uncertain
识别为公交出行,即令tm
uncertain
=bus;反之,则该不确定移动段待下一步处理。本发明将两个轨迹点之间速度小于等于5km/h且距离小于60m的轨迹段算作一次停留。对于,不确定移动段m
uncertain
而言,停车频率计算公式如下:
[0073][0074]
式中:ns表示不确定轨迹段的停车次数,nb表示不确定轨迹段所经过的公交站总数。
[0075]
规则2:高速轨迹点占比约束。
[0076]
城市小汽车行驶的最高速度,明显高于步行、自行车和公交车,因此,本发明将瞬时速度大于15m/s的轨迹点作为高速轨迹点,计算不确定移动段中的高速轨迹点的占比。将高速轨迹点占比超过20%的不确定移动段的出行方式tm
uncertain
识别为小汽车,即令tm
uncertain
=car;反之,则该不确定移动段待下一步处理。高速轨迹点占比rh计算公式如下:
[0077][0078]
式中,nh表示不确定移动段中高速轨迹点的数量;n
t
表示不确定移动段中轨迹点的总数量。
[0079]
规则3:平均方位角变化约束。
[0080]
居民步行时可以根据自己的喜好任意的改变步行方向,而自行车、公交和小汽车受到城市路网结构的约束,只能在交叉口等特定区域或有需要的时候才会变换前进方向;所以,步行的轨迹点方位角的变化相对于其他三种出行方式更大。本发明,将平均方向变化d
avg
大于90
°
的不确定移动段的出行方式tm
uncertain
识别为步行,即令tm
uncertain
=walk;反之,
则该不确定移动段待下一步处理。方位角示意图见图5,平均方向变化d
avg
计算方法如下:
[0081][0082]
式中,表示不确定移动段中第i个轨迹点的方位角;n
t
表示不确定移动段中轨迹点的总数量。
[0083]
规则4:时间范围约束。
[0084]
凌晨和晚上公交基本停运,因此,将晚上23点-第二天凌晨6点之间的不确定移动段的公交出行概率设置为零,即排除居民晚间及凌晨的公交出行。
[0085]
规则5:导航时间相似度约束。
[0086]
对于使用前四种约束规则都无法识别的不确定移动段,本发明结合导航数据,使用导航时间相似度来识别其最终的出行方式。使用高德地图导航平台api接口,将对应的不确定移动段轨迹数据输入,可获取平台规划的公交、小汽车、步行、自行车等出行方式的预期花费时间,由此计算每种交通方式的导航时间隶属度r
k,navtime
,k∈{walk,bike,bus,car},将最大导航时间相似度r
ma
x=max(r
k,navtime
),k∈{walk,bike,bus,car}所对应的出行方式k设置为该不确定移动段的出行方式,即令tm
uncertain
=k;注意:在计算导航时间相似度过程中,若该不确定移动段符合规则4的时间范围约束,则首先应当令公交对应的导航时间隶属度为零,即令r
bus,navtime
=0,然后再计算最大导航时间相似度。时间隶属度计算公式如下:
[0087][0088]
式中,t
real
表示移动段移动的总时间,t
nav
表示导航平台返回的不同交通方式的预期花费时间。
[0089]
s6:至此,已完成某一居民个体出行轨迹中某一个移动段出行方式的识别,重复上述步骤s4到s6完成其他移动段出行方式的识别,最终完成该居民个体出行轨迹中出行方式的识别。
[0090]
基于上述方案,为了验证本发明方法的有效性,本实施例中将上述方案进行实例应用,具体过程如下:
[0091]
(1)数据预处理;获取某一居民个体出行轨迹数据traj,将速度大于120km/h的记录以及同一时间的重复、字段不全等错误记录进行剔除,得到如表5所示的居民个体出行轨迹数据。
[0092]
表5:预处理后的居民个体出行轨迹数据
[0093][0094]
(2)行程链构建;使用smuot算法将经预处理后的居民个体轨迹数据划分为停留段si和移动段mi,并提取其中的移动段mi,待后续处理,本实施例中该个体轨迹数据共提取6个移动段。如表6所示为提取的移动段。
[0095]
表6:提取的移动段
[0096][0097][0098]
(3)综合隶属度计算及确定移动段和不确定移动段划分:
[0099]
根据移动段中轨迹点的位置和时间戳计算每个移动段的出行时长t(minute)、出行距离d(km)和平均出行速度u(km/h)。将计算出来的出行时长t、出行距离d和出行速度v作为表1.4中隶属度函数的自变量,计算步行、公交、自行车、小汽车四种交通各自的综合隶属度和最大隶属度,将最大隶属度超过阈值δ=0.7的移动段判定为确定移动段m
certain
,反之为不确定移动段m
uncertain
,划分结果如表7所示。
[0100]
表7确定移动段和不确定移动段划分
[0101][0102]
(4)确定移动段m
certain
出行方式识别:
[0103]
将确定移动段最高隶属度得分u
max
所对应的交通方式k作为确定移动段的交通出行方式,如移动段m1中u
max
=u
bus
,则该移动段的出行方式tm
certain
=bus,同理,识别其他确定移动段m2,m3,m6的出行方式依次为:walk、ride、walk。这样依次完成所有确定移动段出行方式的识别。
[0104]
(5)不确定移动段m
uncertain
出行方式识别:
[0105]
不确定移动段的出行方式需依次根据停车频率、高速轨迹点占比、平均方位角变化、时间范围和导航时间相似度这五个约束条件来进行识别。如针对不确定移动段m4首先计算其停车频率不符合停车频率约束;接着计算m4中高速轨迹点占比rh=0.15,不符合高速轨迹点占比约束;然后计算平均方位角变化d
avg
=70,不符合平均方位角变化约束;最后将该移动段轨迹输入导航平台api接口获取平台规划的公交、小汽车、步行、自行车等出行方式的预期花费时间,计算不同交通方式的导航时间相似度r
bus,navtime
=0.23,r
car,navtime
=0.45,r
walk,navtime
=0.85,r
ride,navtime
=0.56(如果不确定移动段符合时间范围约束,则应该将r
bus,navtime
修正为0,这里m4不符合无需修正),其中r
max
=r
walk,navtime
=0.85,则不确定移动段m4所对应的出行方式为walk。同理,识别不确定移动段m5所对应的出行方式为bus。至此,已完成该居民个体的交通出行方式识别。
[0106]
为了验证本发明方法的实际效果,本实例将本发明识别方法和现有仅通过距离、时耗、速度三个属性值的映射函数进行识别的方法,如公开号为cn 102136192的专利中提到的方法,进行对比,分别计算两种方法的精确率、召回率。准确率和召回率的计算公式如下:
[0107][0108][0109]
式中,acc,rec,n
correct
,n
distinguish
,n
label
分别表示:精确率,召回率,算法识别的出行方式与实际的出行方式一致的移动段的数量,算法识别各出行方式的移动段数量,实际的各出行方式的移动段数量。经过计算后可以得到本发明识别方法及公开号为cn 102136192的专利中提到的仅凭映射函数的方法对不同交通方式的识别准确率和召回率,计算结果如下:
[0110]
表8本发明识别方法的识别结果混淆矩阵
[0111][0112]
表9仅凭映射函数进行识别的结果混淆矩阵
[0113][0114]
从表8和表9可见,本发明识别方法与现有方法相比,精确率和召回率都有了大幅提升,从而验证了本发明方法的效果。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1