一种无人机着陆航线规划方法及规划系统与流程
1.本发明属于信息技术智能应用技术领域,涉及固定翼无人机的着陆航线规划技术,具体为一种无人机着陆航线规划方法及规划系统。
背景技术:
2.固定翼无人机是指机翼外端后掠角可随速度自动或手动调整的机翼固定的一类无人机。随着无人机技术的蓬勃发展,固定翼无人机由于具有优良的功能、模块化集成,其应用场景越来越广泛。
3.自主研发无人机、靶机、有人机改无人机、多功能无人机等层出不穷,而大部分固定翼无人机的起降都依赖机场跑道,需要设定特定的飞行航线和着陆航线。传统的无人机航线编辑方法是根据飞行科目及需求,在地图上的机场领空范围内选取特定航点信息,记录他们的经度、纬度和高度,从而生成飞行航线和着陆航线,但是这种传统的方法要求对每一条飞行航线设置对应的着陆航线,如果需要临时变更机场,还需要重新设定飞行航线和着陆航线,导致着陆航线规划繁琐且不可复用。
技术实现要素:
4.针对传统的航线规划方法需要针对每一条飞行航线设置对应的着陆航线,导致着陆航线规划繁琐且不可复用的问题,本发明提出了一种无人机着陆航线规划方法及规划系统。
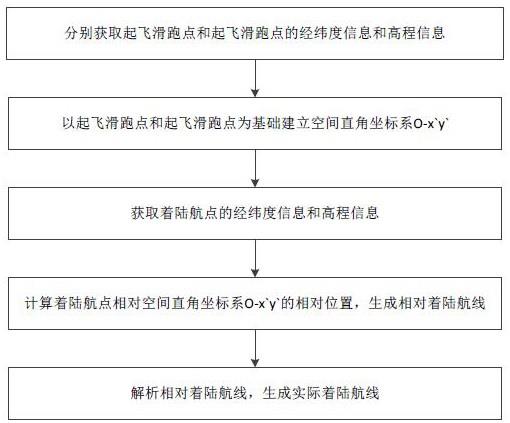
5.本发明一种无人机着陆航线规划方法及规划系统,可用于自动匹配不同飞行航线的不同飞行机场场地的应用场景,提供了一种着陆航线的通用规划方法,具有复用性,简化了着陆航线的规划过程;其具体技术方案如下:一种无人机着陆航线规划方法,包括以下步骤:分别获取起飞滑跑点和起飞滑跑点的经纬度信息和高程信息;以起飞滑跑点和起飞滑跑点为基础建立空间直角坐标系o-x`y`;获取着陆航点的经纬度信息和高程信息;计算着陆航点相对空间直角坐标系o-x`y`的相对位置,生成相对着陆航线;解析相对着陆航线,生成实际着陆航线。
6.进一步限定,所述以起飞滑跑点和起飞滑跑点为基础建立空间直角坐标系o-x`y`的具体步骤为:将起飞滑跑点的地理坐标和起飞滑跑点的地理坐标转换为笛卡尔坐标;以起飞滑跑点为相对坐标原点,建立空间直角坐标系。
7.进一步限定,所述计算着陆航点相对空间直角坐标系o-x`y`的相对位置,生成相对着陆航线的具体步骤为:将着陆航点的地理坐标转换为笛卡尔坐标;
确定着陆航点与空间直角坐标系o-x`y`的相对夹角以及着陆航点与空间直角坐标系o-x`y`的相对坐标,生成相对着陆航线。
8.进一步限定,所述着陆航点与空间直角坐标系o-x`y`的相对夹角以及着陆航点与空间直角坐标系o-x`y`的相对坐标的具体确定过程为:计算空间直角坐标系o-x`y`相对于地理坐标系o-xy的夹角以及着陆航点相对于地理坐标系o-xy的夹角,根据空间直角坐标系o-x`y`相对于地理坐标系o-xy的夹角以及着陆航点相对于地理坐标系o-xy的夹角计算着陆航点与空间直角坐标系o-x`y`的相对夹角;根据着陆航点与空间直角坐标系o-x`y`的相对夹角以及相对坐标原点至着陆航点的向量确定着陆航点的相对坐标。
9.进一步限定,所述解析相对着陆航线,生成实际着陆航线的具体步骤为:根据着陆航点的相对坐标、空间直角坐标系o-x`y`以及着陆航点与空间直角坐标系o-x`y`的相对夹角计算着陆航点的实际坐标;根据着陆航点的实际坐标、起飞滑跑点的经纬度信息以及地球的曲率半径计算出实际着陆航线。
10.进一步限定,所述根据着陆航点的相对坐标、空间直角坐标系o-x`y`以及着陆航点与空间直角坐标系o-x`y`的相对夹角计算着陆航点的实际坐标的具体过程为:根据着陆航点的相对坐标,起飞滑跑点的空间直角坐标以及着陆航点与空间直角坐标系o-x`y`计算着陆航点的实际坐标。
11.进一步限定,所述根据着陆航点的实际坐标、起飞滑跑点的经纬度信息以及地球的曲率半径计算出实际着陆航线的具体过程为:根据着陆航点的实际坐标和起飞滑跑点、地球子午圈曲率半径rm和地球卯酉圈曲率半径rv计算出着陆航点的实际经纬度信息和高程信息,生成实际着陆航线。
12.进一步限定,所述起飞滑跑点为起飞航线上的第一个起飞滑跑点,所述起飞滑跑点为起飞航线上除第一个起飞滑跑点之外的任意一个起飞滑跑点。
13.一种无人机着陆航线规划系统,包括:滑跑点信息获取模块:用于分别获取起飞滑跑点和起飞滑跑点的经纬度信息和高程信息;空间直角坐标系建立模块:用于以起飞滑跑点和起飞滑跑点为基础建立空间直角坐标系o-x`y`;着陆航点信息获取模块:用于获取着陆航点的经纬度信息和高程信息;相对航线生成模块:用于计算着陆航点相对空间直角坐标系o-x`y`的相对位置,生成相对着陆航线;以及实际航线生成模块:用于解析相对着陆航线,生成实际着陆航线。
14.一种计算机可读存储介质,存储有程序文件,所述程序文件被执行实现上述任一的一种无人机着陆航线规划方法。
15.与现有技术相比,本发明的有益效果在于:1、本发明一种无人机着陆航线规划方法,其以起飞滑跑点为参考点,建立空间直
角坐标系o-x`y`,计算着陆航点相对于空间直角坐标系o-x`y`的相对位置,根据相对位置计算着陆航点的实际位置,继而生成实际着陆航线;可以根据不同的飞行航线和不同的飞行机场自动生成实际着陆航线,提高了着陆航线规划的可复用性,不需要再针对不同飞行任务或不同机场跑道设置特定的着陆航线信息。
16.2、本发明一种无人机着陆航线规划方法,其根据起飞滑跑点规划出着陆航线,明确了着陆航线基于相对机场的位置。
附图说明
17.图1为本发明无人机着陆航线规划方法的过程示意图:图2为本发明无人机着陆航线规划系统的示意图;图3为本发明中地理坐标与笛卡尔坐标的转换示意图;图4为本发明空间直角坐标系o-x`y`建立过程的示意图;图5为本发明陆航点与空间直角坐标系o-x`y`的相对坐标以及相对夹角γ的示意图。
具体实施方式
18.下面结合附图及实施例对本发明的技术方案进行进一步地揭解释说明,但本发明并不限于以下说明的实施方式。
19.实施例1参见图1,本实施例一种无人机着陆航线规划方法,其包括以下步骤:分别获取起飞滑跑点和起飞滑跑点的经纬度信息和高程信息;以起飞滑跑点和起飞滑跑点为基础建立空间直角坐标系o-x`y`;获取着陆航点的经纬度信息和高程信息;计算着陆航点相对空间直角坐标系o-x`y`的相对位置,生成相对着陆航线;解析相对着陆航线,生成实际着陆航线。
20.本实施例以起飞滑跑点和起飞滑跑点为参考点,建立空间直角坐标系o-x`y`,然后计算着陆航点与空间直角坐标系o-x`y`的相对位置,根据相对位置计算实际位置,继而生成实际着陆航点。
21.实施例2本实施例一种无人机着陆航线规划方法,在实施例1的基础上,其具体的步骤为:分别获取起飞滑跑点和起飞滑跑点的经纬度信息和高程信息,得到起飞滑跑点和起飞滑跑点;起飞滑跑点为起飞航线上的第一个起飞滑跑点,起飞滑跑点为起飞航线上除第一个起飞滑跑点之外的任意一个起飞滑跑点;参见图4,将起飞滑跑点的地理坐标和起飞滑跑点的地理坐标转换为笛卡尔坐标;以起飞滑跑点为相对坐标原点,将起飞滑跑点指向起飞滑跑点的方向作为x`
轴,以x`轴顺时针旋转90
°
作为y`轴,建立空间直角坐标系o-x`y`;其中,起飞滑跑点的地理坐标和起飞滑跑点的地理坐标是指起飞滑跑点和起飞滑跑点相对于地球原点为坐标系的坐标点;需要说明的是,本实施例中空间直角坐标系还可以通过其他本领域技术人员常用的方式去建立。
22.参见图3,起飞滑跑点转换为笛卡尔坐标的公式为:获取着陆航点的经纬度信息和高程信息;该取着陆航点是指着陆航线上任意一点的信息;将着陆航线的地理坐标转换为笛卡尔坐标;确定着陆航点与空间直角坐标系o-x`y`的相对坐标以及相对夹角γ,生成相对着陆航线;参见图5,其中,着陆航点与空间直角坐标系o-x`y`的相对坐标以及着陆航点与空间直角坐标系o-x`y`的相对夹角γ的具体确定过程为:取着陆航点为,计算空间直角坐标系o-x`y`相对于地理坐标系o-xy的夹角:计算着陆航点相对于地理坐标系o-xy的夹角:计算着陆航点相对于空间直角坐标系o-x`y`的相对夹角γ:计算着陆航点的相对坐标:的相对坐标:的相对坐标:其中,为起飞滑跑点d1的y轴坐标,为起飞滑跑点d2的y轴坐标,为起飞滑跑点d1的x轴坐标,为起飞滑跑点d2的x轴坐标,为着陆航点l1的x轴坐标,为着陆航点l1的y轴坐标,为着陆航点l1在相对坐标系下的x轴坐标,为着陆航点l1在相对坐标系下的y轴坐标,为相对高度,为着陆航点l1的海拔高度,为起飞滑跑点的海拔高度,为相对坐标原点至着陆航点l1的向量;根据着陆航点的相对坐标、空间直角坐标系o-x`y`以及着陆航点与空间直角坐标系o-x`y`的相对夹角γ计算着陆航点的实际坐标;
根据着陆航点的实际坐标、起飞滑跑点的经纬度信息以及地球的曲率半径计算出实际着陆航线;具体的,根据着陆航点的相对坐标、空间直角坐标系o-x`y`以及着陆航点与空间直角坐标系o-x`y`的相对夹角γ计算着陆航点的实际坐标的过程为:据着陆航点的相对坐标,起飞滑跑点的空间直角坐标和和着陆航点与空间直角坐标系o-x`y`的相对夹角γ计算着陆航点的实际坐标的计算过程如下:算过程如下:其中,为实际的着陆航点的x轴坐标,为实际的着陆航点的y轴坐标,为着陆航点l1在相对坐标系下的x轴坐标,为着陆航点l1在相对坐标系下的y轴坐标,为相对高度,为起飞滑跑点d1的x轴坐标,为起飞滑跑点d1的y轴坐标;具体的,根据着陆航点的实际坐标、起飞滑跑点的经纬度信息以及地球的曲率半径计算出实际着陆航线的过程为:根据着陆航点的相对坐标、和起飞滑跑点、地球子午圈曲率半径rm和地球卯酉圈曲率半径rv计算出着陆航点的实际经纬度信息和高程信息,生成实际着陆航线,计算公式如下:计算公式如下:计算公式如下:计算公式如下:为着陆航点的经度信息,为着陆航点的纬度信息,为着陆航点的高程信息;为起飞滑跑点d1的经度信息,为起飞滑跑点d1的纬度信息,为起飞滑跑点d1的高程信息,为着陆航点l1的x轴坐标,为着陆航点l1的y轴坐标,为着陆航点l1的海拔高度,为起飞滑跑点d1的x轴坐标,为起飞滑跑点d1的y轴坐标,为起飞滑跑点d1的海拔高度;地球子午圈曲率半径rm和地球卯酉圈曲率半径rv的计算公式如下:地球子午圈曲率半径rm和地球卯酉圈曲率半径rv的计算公式如下:其中,r为地球半径,e为地球扁率,为起飞滑跑点d1的经度角,为起飞滑跑
点d1的纬度角。
23.具体示例:现取起飞滑跑点d1(87.169595,42.184613,1094)和起飞滑跑点d2(87.20333,42.176778,1094)以及着陆航点l1(87.12184, 42.240726,1094)。
24.先将其分别转换为笛卡尔空间直角坐标d1(233767.11552631774,4728288.742522013, 4261555.204600165)、d2(231011.63848649844, 4729009.338489852,4260910.184443536)以及l1(237497.6634123103, 4723909.043883143,4266172.42338155);计算夹角:α=atan((4729009.338489852-4728288.742522013)/ (231011.63848649844-233767.11552631774))*180/π=-15
°
=atan(4723909/237497)*180/π=87
°
γ= 90-(-15)-87 = 18
°
根据相对角度γ以及计算l1在相对坐标系下的坐标:x` = =3730 my` = =-4379 m= mx
、l1
=cos 18*π/180 *5752 = 5470 my
、l1
= sin 18*π/180 *5752=1777 mz
、l1
= 1094-1094=0 m从而得到l1在相对坐标系下的坐标为(5470,1777,0);当实际应用时,根据着陆航点相对信息l1(5470,1777,0)、起飞滑跑点经纬高(87.169595,42.184613,1094)和的笛卡尔空间坐标(233767.11552631774,4728288.742522013,4261555.204600165)和相对夹角γ计算等计算出着陆航点l1实际经纬度信息1)计算相对夹角γγ=atan(5470/1777)*180/π = 72
°
2)计算着陆点l1的实际坐标x
l1
=233767+(cos(72*π/180)*5470)-sin(72*π/180*1777)=233410 my
l1
=4728288+cos(72*π/180)*1777+sin(72*π/180)*5470=4728592 m3)根据地球半径r=6378137和扁率e=0.003352810664775,以及坐标计算地球子午圈曲率半径rm和地球卯酉圈曲率半径rv = 6367.383 m
=6378.245 m4)计算实际着陆航点经纬高为:lat = (233767-233410)/6367.383+42.184613=42.240726
°
lon=(4728288-4728592)/6378.245+87.169595=87.12184
°
hei = 1094+0=1094 m实施例3参见图2,本实施例一种无人机着陆航线规划系统,其包括滑跑点信息获取模块、空间直角坐标系建立模块、着陆航点信息获取模块、着陆航点信息获取模块、相对航线生成模块以及实际航线生成模块;滑跑点信息获取模块:用于分别获取起飞滑跑点和起飞滑跑点的经纬度信息和高程信息;空间直角坐标系建立模块:用于以起飞滑跑点和起飞滑跑点为基础建立空间直角坐标系o-x`y`;着陆航点信息获取模块:用于获取着陆航点的经纬度信息和高程信息;相对航线生成模块:用于计算着陆航点相对空间直角坐标系o-x`y`的相对位置,生成相对着陆航线;实际航线生成模块:用于解析相对着陆航线,生成实际着陆航线。
25.实施例4本实施例一种计算机可读存储介质,其存储有程序文件,程序文件被执行实现实施例1或实施例2任一项所述的一种无人机着陆航线规划方法。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1