停车场管理系统、停车场管理方法以及存储介质与流程
1.本发明涉及停车场管理系统、停车场管理方法以及存储介质。
背景技术:
2.公知有一种具备太阳能电池面板的自动驾驶车辆的行驶控制装置,就该行驶控制装置而言,在即使考虑自动驾驶车辆的当前位置与太阳能发电场所之间的往返时的电力消耗量,在太阳能发电场所处通过太阳能发电对电池进行充电时的预测充电量也比在当前位置处通过太阳能发电对电池进行充电时的电池的预测充电量多的情况下,通过自动驾驶使自动驾驶车辆行驶至太阳能发电场所(例如参照国际公开第2016-072165)。
3.然而,在该行驶控制装置中存在如下问题:未预先感测太阳能发电场所处的自动驾驶车辆的泊车场所实际上日照是否良好,因此即使使自动驾驶车辆移动至太阳能发电场所,也不清楚是否能对电池充分进行充电。
技术实现要素:
4.为了解决这样的问题,根据本发明,提供一种停车场管理系统,该停车场管理系统具备:基础设施传感器,能检测停车场内的泊车空间的日照状态;以及通知装置,将通过基础设施传感器检测到的各泊车空间的日照状态通知给具有太阳能发电功能的车辆和停车场的利用者中的至少一方。
5.而且,根据本发明,提供一种停车场管理方法,该停车场管理方法使用能检测停车场内的泊车空间的日照状态的基础设施传感器,将通过基础设施传感器检测到的各泊车空间的日照状态通知给具有太阳能发电功能的车辆和该停车场的利用者中的至少一方。
6.而且,根据本发明,提供一种存储介质,该存储介质储存有程序,该程序使计算机以如下方式发挥功能:使用能检测停车场内的泊车空间的日照状态的基础设施传感器,将通过基础设施传感器检测到的各泊车空间的日照状态通知给具有太阳能发电功能的车辆和该停车场的利用者中的至少一方。
7.能良好地发挥车辆的太阳能发电功能。
附图说明
8.以下,参照附图,对本发明的示例性实施例的特征、优点以及技术和工业意义进行说明,其中,相同的附图标记表示相同的元件,其中:
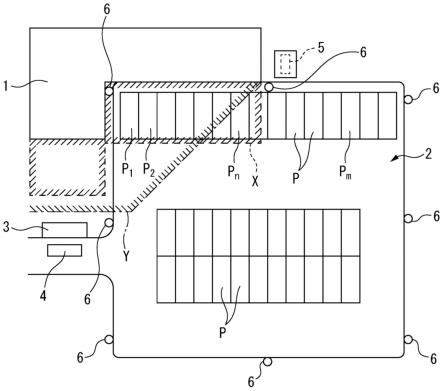
9.图1a是图解地表示的自动停车场的一个例子的俯视图。
10.图1b是图解地表示的自动停车场的一个例子的侧视图。
11.图2是图解地表示泊车管理服务器的图。
12.图3是图解地表示自动驾驶车辆的图。
13.图4是表示日照度r的图。
14.图5是表示日照度r的一览表的图。
15.图6是用于计算日照度r的流程图。
16.图7是用于进行信息提供的流程图。
17.图8是用于进行出库入库的管理的流程图。
18.图9是用于进行自动驾驶控制的流程图。
具体实施方式
19.图1a是图解地表示自动停车场的俯视图,图1b是图1a所示的自动停车场的侧视图。参照图1a和图1b,1表示百货公司等设施,2表示与设施1邻接设置的自动停车场,3表示上下车场所,4表示停止于上下车场所3的自动驾驶车辆。如图1a所示,在自动停车场2内设有许多泊车空间p。在该自动停车场2中,实施通过自动驾驶使到达上下车场所3的自动驾驶车辆4入库至空闲的泊车空间p,并且通过自动驾驶使泊车于泊车空间p的自动驾驶车辆出库至上下车场所3的自动泊车服务,即自动代客泊车服务。另一方面,在图1a中,5表示配置于泊车管理设施的泊车管理服务器。需要说明的是,该自动停车场2也能供手动驾驶的车辆泊车。
20.在利用该自动泊车服务的用户使本车泊车于自动停车场2时,例如,在能进行自动驾驶的本车到达了上下车场所3时,例如从用户的便携终端经由通信网络向泊车管理服务器5,与用于识别本车的车辆id一起发送入库请求。当接收到入库请求时,泊车管理服务器5设定车辆能从上下车场所3到达空闲的泊车空间p而不与其他车辆、行人接触的车辆的行驶路线,并将该设定行驶路线发送至用户的车辆。当从泊车管理服务器5接收到设定行驶路线时,使用户的车辆通过自动驾驶沿着该设定行驶路线从上下车场所3移动至空闲的泊车空间p。
21.另一方面,在用户使本车从自动停车场2出库时也是同样。例如,当用户到达上下车场所3时,从用户的便携终端经由通信网络将出库请求与用于识别本车的车辆id一起发送给泊车管理服务器5。当接收到出库请求时,泊车管理服务器5设定车辆能从泊车中的泊车空间p到达上下车场所3而不与其他车辆、行人接触的车辆的行驶路线,并将该设定行驶路线发送至用户的车辆。用户的车辆当从泊车管理服务器5接收到设定行驶路线时,通过自动驾驶沿着该设定行驶路线从泊车中的泊车空间p移动至上下车场所3。
22.接下来,如图1a所示,在自动停车场2中,以能检测自动停车场2内的整个区域的状态的方式设置有多个基础设施传感器6,这些基础设施传感器6如图1b所示,设置于比车辆高的位置。能使用摄像机或激光传感器等作为这些基础设施传感器6,下面以使用摄像机作为基础设施传感器6的情况为例进行说明。即,以通过基础设施传感器6对自动停车场2内进行拍摄的情况为例进行说明。在该情况下,通过各基础设施传感器6对自动停车场2内的所有的泊车空间p和泊车空间p间的所有的通路进行拍摄,通过各基础设施传感器6拍摄到的图像信号被发送至泊车管理服务器5。在泊车管理服务器5中,基于这些图像信号来设定出库入库时的自动驾驶车辆的行驶路线。
23.图2示出了图1a的泊车管理服务器5。如图2所示,在该泊车管理服务器5内设有电子控制单元10。该电子控制单元10由数字计算机构成,具备通过双向总线11相互连接的cpu(微处理器)12、由rom和ram构成的存储器13以及输入输出端口14。如图2所示,通过各基础设施传感器6拍摄到的图像信号被输入至电子控制单元10。此外,在电子控制单元10的存储
器13内存储有自动停车场2的地图数据。
24.图3图解地示出了具有太阳能发电功能的自动驾驶车辆20的一个例子。参照图3,21表示用于对车辆20的驱动轮施加驱动力的车辆驱动部,22表示用于对车辆驱动部21供给电力的电池,23表示设置于车辆20的车顶上的太阳能电池面板,24表示用于将在太阳能电池面板23中发电的电力充电至电池22的充电控制装置,25表示用于对车辆20进行制动的制动装置,26表示用于对车辆20进行转向的转向装置,27表示搭载于车辆20内的电子控制单元。如图3所示,电子控制单元27由数字计算机构成,具备通过双向总线28相互连接的cpu(微处理器)29、由rom和ram构成的存储器30以及输入输出端口31。
25.另一方面,如图3所示,在车辆20中设置有车辆20进行自动驾驶所需的各种传感器40,即检测车辆20的状态的传感器和检测车辆20的周边的周边感测传感器。在该情况下,使用加速度传感器、速度传感器、方位角传感器来作为检测车辆20的状态的传感器,使用对车辆20的前方、侧方、后方进行拍摄的车载摄像机、激光雷达(lidar)、雷达等来作为检测车辆20的周边的周边感测传感器。此外,在车辆20中设有gnss(global navigation satellite system:全球定位卫星系统)接收装置41、地图数据存储装置42、导航装置43以及用于进行各种操作的操作部44。gnss接收装置41能基于从多个人造卫星获得的信息来检测车辆20的当前位置(例如车辆20的纬度和经度)。因此,能通过该gnss接收装置41来获取车辆20的当前位置。例如,使用gps接收装置作为该gnss接收装置41。
26.另一方面,在地图数据存储装置42中存储有车辆20进行自动驾驶所需的地图数据等。该各种传感器40、gnss接收装置41、地图数据存储装置42、导航装置43以及操作部44连接于电子控制单元27。此外,在车辆20搭载有用于与泊车管理服务器5进行通信的通信装置45,如图2所示,在泊车管理服务器5内设有用于与车辆20进行通信的通信装置15。在图3所示的例子中,车辆驱动部21由通过电池22驱动的电动马达构成,车辆20的驱动轮按照电子控制单元27的输出信号通过电动马达被驱动控制。此外,车辆20的制动控制按照电子控制单元27的输出信号通过制动装置25来进行,车辆20的转向控制按照电子控制单元27的输出信号通过转向装置26来进行。
27.那么,为了在自动驾驶车辆20正泊车于自动停车场2的期间通过太阳能电池面板23高效地进行太阳能发电,需要预先使车辆20泊车于阳光照射的泊车空间p。因此,需要判别哪个泊车空间p实际上正被阳光照射。另一方面,在该情况下,能根据通过各基础设施传感器6拍摄到的图像来识别在自动停车场2内的所有的泊车空间p和泊车空间p间的所有的通路中阳光照射的区域和阳光不照射的区域。因此,在根据本发明的实施例中,为了使车辆20泊车于实际上阳光照射的泊车空间p,根据通过各基础设施传感器6拍摄到的图像来确定阳光照射的区域。
28.接着,参照图1a、图4以及图5,并且基于具体的一个例子,对本发明的概要进行说明。首先,参照图1a,在图1a中,由虚线包围的区域x(仅在区域周边标注有斜线)表示某日的正午的由设施1形成的遮阴(shaded)区域,由单点划线包围的区域y(仅在区域周边的一部分标注有斜线)表示同日的傍晚的由设施1形成的遮阴区域。如此,遮阴区域x、y在一日之间位置会变化,此外,也根据春夏秋冬这样的季节的不同而位置变化。此外,在自动停车场2内或在自动停车场2的周边设置有遮挡阳光的构造物等的情况下,遮阴区域也会变化。因此,无法仅根据天气来判断在自动停车场2内阳光照射的区域。
29.因此,在根据本发明的实施例中,根据通过各基础设施传感器6拍摄到的图像来确定阳光照射的区域。在该情况下,若将在各泊车空间p的区域中阳光照射的部分的比例称为日照度r,则在根据本发明的实施例中,根据通过各基础设施传感器6拍摄到的图像来计算各泊车空间p的日照度r。图4示出了图1a所示的泊车空间p中的代表性的泊车空间p1、p2、pn、pm的从某日的时刻6:00起到时刻18:00为止的期间的日照度r的变化,图5示出了从同日的时刻6:00起到时刻18:00为止的期间中的一部分的时间的代表性的泊车空间p1、p2、pn、pm处的日照度r的变化的一览表。需要说明的是,在图5所示的例子中,示出了每10分钟的日照度r的变化。
30.接着,参照图6对该日照度r的计算方法进行说明。图6示出了用于计算日照度r的日照度计算例程,该例程在泊车管理服务器5的电子控制单元10内被反复执行。参照图6,首先,在步骤50中,判别是否成为了日照度r的计算时刻。在根据本发明的实施例中,如图5所示,按每10分钟求出日照度r,例如,时刻6:00、时刻6:10、时刻6:20被设为日照度r的计算时刻。在步骤50中,在判别为不是日照度r的计算时刻时结束处理循环,在判别为成为了日照度r的计算时刻时进入步骤51。
31.在步骤51中,获取各基础设施传感器6的检测信号,即图像信号。接着,在步骤52中,根据这些图像信号来判别是否能识别日照区域和背阴区域。例如,在晴天时判别为能识别日照区域和背阴区域,在阴天时等没有阳光时判别为不能识别日照区域和背阴区域。在步骤52中,在判别为不能识别日照区域和背阴区域时结束处理循环,在判别为能识别日照区域和背阴区域时进入步骤53。
32.在步骤53中,基于存储于泊车管理服务器5的电子控制单元10的存储器13内的自动停车场2的地图数据,根据获取到的各基础设施传感器6的图像信号来确定图1a所示那样的自动停车场21的平面地图上的日照区域,根据确定出的日照区域和各泊车空间p的位置来计算各泊车空间p的日照度r。当计算出日照度r时,进入步骤54,对存储于泊车管理服务器5的电子控制单元10的存储器13内的各泊车空间p的日照度r进行更新。因此,在能识别日照区域和背阴区域的情况下,在存储器13内存储有当前的实际的各泊车空间p的日照度r,在不能识别日照区域和背阴区域的情况下,在存储器13内存储有前一次更新的实际的各泊车空间p的日照度r,即最新的实际的各泊车空间p的日照度r。
33.图7示出了用于提供与日照度r相关的信息的信息提供例程,该例程在泊车管理服务器5的电子控制单元10内被反复执行。
34.参照图7,首先,在步骤60中,读入存储于存储器13内的各泊车空间p的日照度r。接着,在步骤61中,将各泊车空间p的日照度r通知给具有太阳能发电功能的车辆20或自动停车场2的利用者等需要取得与各泊车空间p的日照度r相关的信息的对象。在该情况下,关于与各泊车空间p的日照度r相关的信息的通知方法,存在各种各样的方法。例如,既能配置为当访问泊车管理服务器5时,能阅览与各泊车空间p的日照度r相关的信息,也能从泊车管理服务器5经由通信网络将与各泊车空间p的日照度r相关的信息通知给需要取得该信息的对象。
35.如此,在根据本发明的实施例中,设有:基础设施传感器6,能检测停车场2内的泊车空间p的日照状态;以及通知装置,将通过基础设施传感器6检测到的各泊车空间p的日照状态通知给具有太阳能发电功能的车辆20和停车场2的利用者中的至少一方。在该情况下,
在根据本发明的实施例中,泊车管理服务器5构成该通知装置。
36.此外,在根据本发明的实施例中,每隔一定时间的各泊车空间p的日照状态被通知给具有太阳能发电功能的车辆20和停车场2的利用者中的至少一方。此外,在根据本发明的实施例中,在能通过基础设施传感器6检测当前的实际的停车场2内的泊车空间p的日照状态时,当前的实际的停车场2内的泊车空间p的日照状态被通知给具有太阳能发电功能的车辆20和停车场2的利用者中的至少一方,在不能通过基础设施传感器6检测当前的实际的停车场2内的泊车空间p的日照状态时,最新的实际的泊车空间p的日照状态被通知给具有太阳能发电功能的车辆20和停车场2的利用者中的至少一方。
37.此外,在根据本发明的实施例中,基于通过基础设施传感器6检测到的各泊车空间p的日照状态,按每个泊车空间p求出日照度r,该日照度r被通知给具有太阳能发电功能的车辆20和停车场2的利用者中的至少一方。
38.而且,在根据本发明的实施例中,提供一种停车场管理方法,该停车场管理方法使用能检测停车场2内的泊车空间p的日照状态的基础设施传感器6,将通过基础设施传感器6检测到的各泊车空间p的日照状态通知给具有太阳能发电功能的车辆20和停车场2的利用者中的至少一方。
39.此外,在根据本发明的实施例中,提供一种程序,该程序使计算机以如下方式发挥功能:使用能检测停车场2内的泊车空间p的日照状态的基础设施传感器6,将通过基础设施传感器6检测到的各泊车空间p的日照状态通知给具有太阳能发电功能的车辆20和停车场2的利用者中的至少一方。所述程序储存于存储介质。
40.接着,说明应用于为了在自动驾驶车辆20泊车于自动停车场2的期间使其通过太阳能电池面板23进行太阳能发电而自动泊车服务的用户使自动驾驶车辆20泊车于自动停车场2的情况下的向自动停车场2出库入库的出库入库方法。图8示出了用于实施向该自动停车场2出库入库的出库入库方法的出库入库管理例程,该例程在泊车管理服务器5的电子控制单元10内被反复执行。
41.参照图8,首先,在步骤70中,判别是否存在向自动停车场2入库的入库请求。在判别为存在向自动停车场2入库的入库请求时,进入步骤71,判别在泊车中是否存在通过太阳能电池面板23进行太阳能发电的发电请求。在判别为不存在通过太阳能电池面板23进行太阳能发电的发电请求时结束处理循环。与此相对,在判别为存在通过太阳能电池面板23进行太阳能发电的发电请求时,进入步骤72,获取自动驾驶车辆20的车辆id。需要说明的是,在进行向自动停车场2入库的入库请求时,请求预定出库时刻的登记,在步骤73中,获取所登记的预定出库时刻。接着,在步骤74中,设定用于在预定出库时刻前在自动驾驶车辆20的泊车场所移动的移动时刻。该移动时刻例如被设为预定出库时刻的30分钟前。
42.接着,在步骤75中,基于图5所示的一览表,检索在从入库时刻起到移动时刻为止的期间日照度r高的空闲的泊车空间p,优选的是检索日照度r为百分之百的空闲的泊车空间p,并将日照度r高的空闲的泊车空间p设定为移动目的地。接着,在步骤76中,基于存储于存储器13内的自动停车场2的地图数据来设定从上下车场所3起到所设定的移动目的地为止的行驶路线。接着,在步骤77中,基于存储于存储器13内的自动停车场2的地图数据和基础设施传感器6的图像信号来决定不与其他车辆、行人接触的自动驾驶车辆20的行驶轨迹和行驶速度。
43.在该情况下,也能在自动驾驶车辆20到达移动目的地并泊车于所设定的泊车空间p时,以与自动驾驶车辆20的前侧相比阳光更强烈地照射至自动驾驶车辆20的后侧的方式决定自动驾驶车辆20的行驶轨迹和行驶速度,也包括决定自动驾驶车辆20向所设定的泊车空间p的泊车姿势。如此,存在如下优点:若以与自动驾驶车辆20的前侧相比阳光更强烈地照射至自动驾驶车辆20的后侧的方式泊车,则能防止前灯的泛黄,并且能防止行车记录仪的加热。接着,在步骤78中,发出自动驾驶车辆20的自动驾驶执行指令,接着,在步骤79中,从泊车管理服务器5向自动驾驶车辆20发送所设定的移动目的地、行驶路线、行驶轨迹、行驶速度以及自动驾驶执行指令。
44.当从泊车管理服务器5向自动驾驶车辆20发送了自动驾驶执行指令时,开始自动驾驶车辆20的自动驾驶控制。图9示出了用于进行该自动驾驶车辆20的自动驾驶控制的自动驾驶控制例程,该例程在搭载于车辆20的电子控制单元27中被反复执行。
45.参照图9,首先,在步骤90中,获取在泊车管理服务器5中设定的移动目的地,接着,在步骤91中,获取在泊车管理服务器5中设定的行驶路线,在步骤92中,获取在泊车管理服务器5中设定的行驶轨迹和行驶速度。接着,在步骤93中,沿着所设定的行驶轨迹,基于对自动驾驶车辆20的前方等进行拍摄的摄像机、激光雷达(lidar)、雷达等的检测结果,以不与其他车辆、行人接触的方式进行自动驾驶车辆20的行驶控制。接着,在步骤94中,判别自动驾驶车辆20是否到达了移动目的地。在判别为自动驾驶车辆20未到达移动目的地时,返回至步骤93,继续进行自动驾驶车辆20的自动驾驶。另一方面,在步骤94中,在判别为自动驾驶车辆20到达了移动目的地时,进入步骤95,结束自动驾驶车辆20的自动驾驶控制。
46.再次返回至图8,在步骤70中,在判别为未发出向自动停车场2入库的入库请求时,进入步骤80,判别当前的时刻是否成为了在步骤74中设定的移动时刻。在判别为当前的时刻未成为在步骤74中设定的移动时刻时,结束处理循环。与此相对,在判别为当前的时刻成为了在步骤74中设定的移动时刻时,进入步骤81,基于图5所示的一览表,在从当前起到预定出库时刻为止的期间,检索日照度r低的空闲的泊车空间p,优选的是检索成为背阴的空闲的泊车空间p,在从当前起到预定出库时刻为止的期间,将日照度r低的空闲的泊车空间p设定为新的移动目的地,优选的是将成为背阴的空闲的泊车空闲p设定为新的移动目的地。
47.接着,在步骤82中,基于存储于存储器13内的自动停车场2的地图数据来设定从当前的泊车空间p3起到所设定的新的移动目的地为止的行驶路线。接着,在步骤83中,基于存储于存储器13内的自动停车场2的地图数据和基础设施传感器6的图像信号来决定不与其他车辆、行人接触的自动驾驶车辆20的行驶轨迹和行驶速度。接着,在步骤78中,发出自动驾驶车辆20的自动驾驶执行指令,接着,在步骤79中,从泊车管理服务器5向自动驾驶车辆20发送所设定的新的移动目的地、行驶路线、行驶轨迹、行驶速度以及自动驾驶执行指令。当从泊车管理服务器5向自动驾驶车辆20发送了自动驾驶执行指令时,执行图9所示的自动驾驶控制例程,进行自动驾驶车辆20的自动驾驶直到所设定的新的移动目的地为止。
48.如此,在图8和图9所示的实施例中,基于通过基础设施传感器6检测到的各泊车空间p的日照状态来识别日照度r高的泊车空间p和日照度r低的泊车空间p,在存在具有太阳能发电功能的自动驾驶车辆20的入库请求时,通过自动驾驶使自动驾驶车辆20移动至日照度r高的泊车空间p来进行泊车。在该情况下,在图8和图9所示的实施例中,使泊车于日照度r高的泊车空间p的自动驾驶车辆20在预定出库时刻前移动至日照度r低的泊车空间p,优选
的是移动至成为背阴的泊车空间p。
49.如此,使泊车于日照度r高的泊车空间p的自动驾驶车辆20在预定出库时刻前移动至日照度r低的泊车空间p,优选的是移动至成为背阴的泊车空间p,由此能在自动驾驶车辆20出库之前预先使自动驾驶车辆20的室内温度下降。需要说明的是,在该情况下,也能根据泊车中的自动驾驶车辆20的室内温度或太阳的位置来变更移动时刻与预定出库时刻的时间间隔,以便能在自动驾驶车辆20出库之前使自动驾驶车辆20的室内温度充分下降。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1