一种道路绿波优化算法及系统的制作方法
1.本技术涉及智能交通领域,尤其涉及道路绿波优化算法及系统。
背景技术:
2.当前,绿波道路是指在指定的交通路线上,指定路段的速度后,信号控制器根据路段的距离,相应地调整车流经过的每个路口的绿灯开始时间,以保证车流到达每个路口时刚好遇到“绿灯”。这种“绿波”交通减少车辆在交叉口的停歇,提高了平均行车速度和通行能力。但目前由于在不同时间环境下,通过的车流大小不同,并且随着城市发展,机动车保有量不断的增加,需要不定时的人工根据车流量调整每个路口的绿灯开始时间以及相位放行时长,无法灵活的进行应对。
3.此外,为了提高区域内整体道路的通行能力,需要将这片区域内的多条道路相交道路实现“绿波”效果,起到缓解区域内的交通压力的作用。基于以上问题本发明需要设计一种绿波道路的优化算法,既可以减少人工的工作量,也可以根据不同时间维度的车流量大小和路段速度,快速灵活计算方案。
4.因此,期望提供一种道路绿波优化算法及系统,根据路口车流量和路段车辆速度计算路口相位配时和区域中多条路段的相位差,提高车辆通行能力,缓解区域交通压力。
技术实现要素:
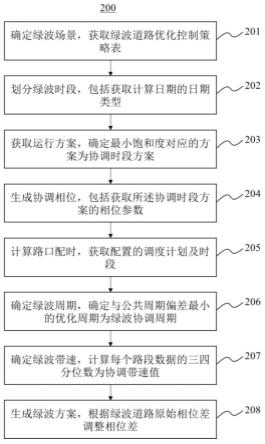
5.根据本技术的一些实施例的第一方面,提供了一种道路绿波优化算法,应用于平台(例如,云控平台等)中,所述算法可以包括确定绿波场景,获取绿波道路优化控制策略表;划分绿波时段,包括获取计算日期的日期类型;获取运行方案,确定最小饱和度对应的方案为协调时段方案;生成协调相位,包括获取所述协调时段方案的相位参数;计算路口配时,获取配置的调度计划及时段;确定绿波周期,确定与公共周期偏差最小的优化周期为绿波协调周期;确定绿波带速,计算每个路段数据的三四分位数为协调带速值;生成绿波方案,根据绿波道路原始相位差调整相位差。
6.在一些实施例中,所述确定绿波场景,获取绿波道路优化控制策略表,具体包括获取待优化的绿波道路列表,包括绿波道路优化优先级、绿波道路关键交叉口;获取待优化的绿波道路参数数据,所述参数数据包括关联路口、路口顺序、路口间距、路口;获取至少两个绿波道路组团,每个所述绿波道路组团包括存在相同路口的绿波道路,后续分别对每个所述绿波道路组团的绿波道路进行优化。
7.在一些实施例中,所述划分绿波时段,具体包括:
8.s301.获取计算日期的日期类型,当计算前一天时,所述日期类型为前一天;
9.s302.获取每一所述绿波道路组团内的所有关键交叉口;
10.s303.获取s302中所述日期类型的所有所述关键交叉口每个车道每5分钟的车道基准流量,计算所述日期类型的24小时中每5分钟的基准流量之和为:
[0011][0012]
s304.抽取数据f
i=1....288
,生成初始余数集为s305.查找最大数据fi及其序号i;
[0013]
s306.设置本组数据比对阈值αfi,生成第一组数据对应余数集为
[0014]
s307.以fi数据为起点向两侧比对数据,即以序号i位数据fi分别与向前序号i-1数据f
i-1
和向后序号i+1位数据f
i+1
进行比对,确定偏差β;
[0015]
s308.判断β与阈值αfi关系;
[0016]
s309.若β≤αfi,则序号i-1位数据f
i-1
和序号i+1位数据f
i+1
与序号i位数据fi同属一组,更新本组数据集为对应余数集为
[0017]
s310.继续比对序号i-2位数据f
i-2
和序号i+2位数据f
i+2
与序号i位数据fi的偏差β;
[0018]
s311.若β≤αfi,更新本组数据集为对应余数集为
[0019]
s312.继续比对序号i-m位数据f
i-m
和序号i+n位数据f
i+n
与序号i位数据fi的偏差β;
[0020]
s313.若β≤αfi,更新本组数据集为对应余数集为其中,余数集中的i-m和i+n表示依次循环比对后,用于确定是否需放入本组数据集;
[0021]
s314.若β》αfi,序号i-m位数据f
i-m
和序号i+n位数据f
i+n
与序号i位数据fi不属一组,即第一组数据集为s311所示结果,第一组数据集的最大值为fi;
[0022]
s315.在余数集继续选择最大值,即序号k位数据fk,生成第二组数据对应余数集为
[0023]
s316.以序号k位数据fk为起点向两侧比对数据,即以序号k位数据fk分别与向前序号k-1位数据f
k-1
和向后序号k+1位数据f
k+1
进行比对,确定偏差β;
[0024]
s317.判断序号k前后的比对序号k-1位数据f
k-1
和序号k+1位数据f
k+1
是否在余数集dr中,若在余数集dr中,所对应的方向搜索继续,若不在余数集dr中,所对应的方向搜索结束;
[0025]
s318.重复s309-s317,确定第二组数据集为第二组数据集的最大值为fk,对应余数集为余数集中的i-m和i+n用于表示依次循环比对后,是否需放入本组数据集;
[0026]
s319.重复s309-s318,直至余数集dr中无剩余数据,根据原始数据序号将x组数据d1,d2..d
x
进行重新排序,即:
[0027][0028]
比对每组数据集的数据个数,当某一组数据集d
x
中的数据个数少于γ时,将该组数据集d
x
合并至d
x
在d
1、2...x
数据集排序中的前一组或后一组数据集中;
[0029]
s320.和分别表示前一组和后一组数据集,判断集,判断的大小;当将d
x
数据集合并至数据集中;当将d
x
数据集合并至数据集中;当对比判断与d
x
数据集的所有数据的差值绝对值之和与maxd
x
与数据集的所有数据的差值绝对值之和的大小,将d
x
合并至差值绝对值之和较小的数据集中;
[0030]
s321.根据重新划分的数据集:
[0031]
进行数据集分析;
[0032]
s322.输出所述日期类型中24小时的时段划分结果:
[0033]
(0、g*15/60)、(g*15/60、h*15/60)、(h*15/60、k*15/60、)......((j+1)*15/60、24:00)。
[0034]
在一些实施例中,所述划分绿波时段,具体包括:
[0035]
s401.获取已存在时段的绿波道路的配置方案,并对更新时段划分的绿波道路进行时段方案匹配;
[0036]
s402.根据所述时段划分结果,分别获取每个路口在所述日期类型下该时段内的至少两个方案;
[0037]
s403.获取每个路口的每个车道的5分钟基准流量和∑f
b-5
;
[0038]
s404.计算s402获取的每个方案小时通行能力ch;
[0039]
s405.计算每个方案饱和度∑f
b-5
/ch;
[0040]
s406.确定至少两个饱和度∑f
b-5
/ch中的最小值对应的方案为路口协调时段方案。
[0041]
在一些实施例中,所述生成协调相位,具体包括:
[0042]
s501.获取已存在时段的绿波道路的协调相位,并基于所述时段方案对更新时段
划分的绿波道路进行协调相位匹配;
[0043]
s502.获取绿波道路所有路口的内部转向关系,若获取成功继续,若获取失败退出当前绿波道路优化;
[0044]
s503.获取绿波道路上下游路段及路口的关联关系,若获取成功继续,若获取失败退出当前绿波道路优化;
[0045]
s504.根据绿波道路上下游路口的关联关系,分别获取绿波道路的每个路口正、反向协调流向;
[0046]
s505.判断经过上游路段-连接路口-下游路段方位,以获取两个路段及连接路口的关联关系,判断开始路段与结束路段分别位于连接路口的方向,通过路口的转向开始方向至路口的转向结束方向判断该路口的转向车道;
[0047]
s506.根据s505正反向转向车道获取相位参数,并获取当前时段方案的当前转向车道在该路口的所处相位,若存在至少两个相位,按相位相序排列所述至少两个相位,作为协调相位。
[0048]
在一些实施例中,所述计算路口配时,获取配置的调度计划及时段,具体包括:
[0049]
s601.获取已存在时段的绿波道路的调度计划及时段,并获取各路口的初始配时参数;
[0050]
s602.根据所述调度计划及时段,获取每个路口该时段内各车道每5分钟基准流量之和∑f
b-5
,对获取成功的路口进行配时优化,对未获取的路口配置初始配时参数;
[0051]
s603.将∑f
b-5
换算至路口小时流量ti为时段划分后的小时时段长度;
[0052]
s604.获取路口车道渠化信息、所述时段方案的相位相序、车道通行能力以及周期时长t0;
[0053]
s605.计算该时段下各车道流量比其中,fh为车道小时流量,c
x
为车道小时饱和流率的配置值;
[0054]
s606.确定当前所述时段方案的各相位最大流量比yi=max[y
x
],其中,i代表相位号,若多个相位中存在同一个车道时,对不同相位中的同一车道赋值相同;
[0055]
s607.计算路口各相位最大流量比之和y=∑yi;
[0056]
s608.计算所述时段方案的绿灯损失时间l=∑(li+i
i-ai),其中,相位i的信号损失时间为li,绿灯间隔时间ii,黄灯时间ai)
[0057]
s609.判断y值区间,若y<0.7,周期时长若0.7≤y<1,周期时长c0=1.23le
(2.46-0.02l)*y
;若1≤y,退出;
[0058]
s610.判断周期时长;
[0059]
s611.若c0≤t0+30&c0<=180,则c0=c0;
[0060]
s612.若c0≤t0+30&c0>180,则c0=180;
[0061]
s613.若c0>t0+30&c0<=180,则c0=t0+30;
[0062]
s614.若c0>t0+30&c0>180,则c0=180;
[0063]
s615.计算周期有效绿灯时长ge=c
0-l;
[0064]
s616.计算各相位流量比占流量比之和的比例
[0065]
s617.计算各相位有效绿灯时长
[0066]
s618.计算各相位显示绿灯时间gli=max(g
ei
、g
min
)+l
i-ai,其中,g
min
当前时段关联的所有相位的最小绿灯时长,max取最大值;
[0067]
s619.计算优化周期为c0=∑(gli+ii)。
[0068]
在一些实施例中,所述确定绿波周期,确定与公共周期偏差最小的优化周期为绿波协调周期,具体包括:
[0069]
s701.获取绿波道路组团的所有关键路口优化周期ci;
[0070]
s702.确定公共周期为maxci;
[0071]
s703.判断每个路口优化周期与maxci的差值,确定maxci与路口优化周期的最小差值对应路口绿波协调周期c
co
;
[0072]
s704.计算匹配绿波协调周期的每个路口各相位绿灯时长
[0073]
在一些实施例中,所述确定绿波带速,计算每个路段数据的三四分位数为协调带速值,具体包括:
[0074]
s801.获取绿波道路沿线的每一路口连续n个相同日期类型当前计算时段内的正、反向协调流向的速度vi;
[0075]
s802.计算每一路口速度值的三四分位数;
[0076]
s803.确定每个第三四分位数为路口正反向的协调带速值。
[0077]
在一些实施例中,所述生成绿波方案,根据绿波道路原始相位差调整相位差,具体包括:s901.根据每一绿波道路组团,计算每个组团的各绿波道路原始相位差;
[0078]
s902.根据绿波道路组团的优化优先级顺序,调整路口相位差;
[0079]
s903.生成两个数组,包括第一数组
①
未调整相位差绿波道路数组,第二数组
②
已调整相位差绿波道路数组;
[0080]
c、在第一数组
①
中获取优化优先级顺序最小的绿波道路,若无数据即完成调整,若有数据程序继续循环调整;
[0081]
d、在第二数组
②
中获取优化优先级顺序最大的绿波道路,若无数据,将a获取的绿波道路放入
②
中,在
①
中删除该绿波道路,所述绿波道路各路口相位差不变;若有数据,判断
②
中获取的绿波道路与
①
中的绿波道路是否存在关联路口,若存在且至少两个,确定道路等级更高的交叉路口作为基准路口,调整
①
中获取的绿波道路所有路口相位差,将调整后的该绿波道路由第一数组
①
转移至第二数组
②
;所述调整相位差包括:
[0082]
所述交叉路口在第二数组
②
的绿波道路中的相位差为t0,在第一数组
①
中获取的绿波道路中的相位差为t1,则相位差偏差为t
0-t1,第一数组
①
中获取的绿波道路其他路口调整后的相位差为[t
i-(t
1-t0)]mod ci;
[0083]
s904.重复以上s903,直至第一数组
①
中无绿波道路的数据。
[0084]
在一些实施例中,所述计算绿波道路相位差,具体包括:
[0085]
s1001.获取绿波道路参数,包括绿波道路编号、路口序号、路口编号、关键路口,每一绿波道路至多设置一个关键路口;路口宽度wi、路口正向间距li→
i+1
、路口反向间距li→
i-1
其中,i=1....n,n为路口数量;
[0086]
s1002.获取路口i的配时参数,正向协调相位绿灯时长t
if
、反向协调相位绿灯时长t
i|r
、正反向协调相位绿灯开启时间差δt
i|fr
;
[0087]
s1003.获取路口i的正向协调带速vi→
i+1
、反向协调带速vi→
i-1
;
[0088]
s1004.获取路口i的正向协调相位相位差o
i|f
、反向协调相位相位差o
i|r
=o
i|f
+δt
i|fr
;
[0089]
s1005.获取路口i的周期ci;
[0090]
s1006.获取当前协调类型,包括双向协调、正向协调、反向协调;
[0091]
s1007.计算路口i与路口i+1的双向协调相位,当类型为双向协调时,进入s1007-s1011:j、初始固定路口i的正向协调相位相位差o
i|f
=0,反向协调相位相位差o
i|r
=δt
i|ifr
;k、计算路口i+1的正向协调相位相位差反向协调相位相位差o
i+1|r
=o
i+1|f
+δt
i+1|fr
;其中,路口i+1相位差分别由0至c
i+1
循环遍历;
[0092]
l、判断此时路口i、路口i+1是否形成双向绿波,若形成双向绿波,记录正向带宽b
i+1
→
1|f
,反向带宽b
i+1
→
i|r
;包括步骤d-g:
[0093]
m、判断此时正向是否形成协调相位:[mc
i+1
+o
i+1|f
、mc
i+1
+o
i+1|f
+t
i+1|f
],其中,m为大于等于0的整数;存在m使[mc
i+1
+o
i+1|f
、mc
i+1
+o
i+1|f
+t
i+1|f
]存在重叠部分,即路口i+1的正向协调相位相位差为o
i+1|f
,
[0094]
n、判断此时反向是否形成协调相位:[nci+o
i|r
、nci+o
i|r
+t
i|r
],其中,n为大于等于0的整数;存在n使[nci+o
i|r
、nci+o
i|r
+t
i|r
]存在重叠部分,即路口i+1的反向协调相位相位差为o
i+1|f
,此时正向带宽:
[0095][0095]
其中,
[0096]
为处在重叠区间的点;
[0097]
o、反向带宽:
[0098][0098]
其中,
[0099]
为处在重叠区间的点;
[0100]
p、当路口i、路口i+1形成双向绿波,即同时满足d、e步骤时,计算b=bi→
i+1|r
+b
i+1
→
i|r
,获取maxb所对应的路口i+1的正向协调相位相位差为o
i+1|f
为路口i与路口i+1之间的双向协调相位差;若当maxb存在至少两个值时,获取正向、反向带宽偏差的较小值,当此时仍存在多个值时,确定路口i+1正向协调相位相位差为o
i+1|f
的较小值;
[0101]
q、当路口i、路口i+1无法形成双向绿波,即不满足双向协调条件时,确定为正向协调,并计算路口i与路口i+1的协调相位相位差为
[0102]
r、记录路口i与路口i+1是否形成双向协调,若否记录为0,若是记录为1,路口i+1相
[0103]
对路口i相位差为o
i+1|f
;
[0104]
s1008.重复以上步骤,计算路口i+1与路口i+2的协调相位差,直至最后一个路口完成计算,生成最后的结果列表[0、o
2|f
、o
3|f
、、...o
n|f
];
[0105]
s1009.计算路口相对第一个路口修正后的相位差为[0、o2、o3、、...on],o2=o
2|f
,o3=(o
3|f
+o
2|f
)mod c3,o4=(o
4|f
+o
3|f
+o
2|f
)mod c4,on=(o
n-1|f
+...+o
3|f
+o
2|f
)mod cn;
[0106]
s1010.获取是否存在关键路口,若不存在关键路口,所有路口的最终协调相位相位差即为s1008所示,若存在关键路口对最终协调相位差进行修改,关键路口最终协调相位差offk=0,关键路口相位差修正量为δo=0-ok,计算其他路口最终协调相位差;
[0107]
s1011.所有路口的最终协调相位相位差为[0+δo、(o2+δo)mod c2、(o3+δo)mod c3、、...(on+δo)mod cn];
[0108]
当不存在双向绿波协调,或满足条件时,单向协调带宽低于阈值时,使用正向协调算法计算所述两个路口之间的协调相位;
[0109]
s1012.计算路口i与路口i+1的正向协调相位,当类型为正向协调时,进入s1012-s1015:
[0110]
c、当为正向协调时,计算路口i与路口i+1的协调相位相位差为c、当为正向协调时,计算路口i与路口i+1的协调相位相位差为
[0111]
d、重复以上步骤计算路口i+1与路口i+2的协调相位差,直至最后一个路口完成计算,生成最后的结果列表
[0112]
s1013.计算路口相对第一个路口修正后的相位差为[0、o2、o3、、...on],
[0113][0114]
s1014.获取是否存在关键路口,若不存在关键路口,所有路口最终协调相位相位差即为s1013所示,若存在关键路口对最终协调相位差进行修改,关键路口最终协调相位差offk=0,关键路口相位差修正量为δo=0-ok,计算其他路口最终协调相位差;
[0115]
s1015.所有路口的最终协调相位差为[0+δo、o2+δo、o3+δo、、...on+δo];
[0116]
当以上不存在双向绿波协调,或满足条件时,单向协调带宽低于阈值时,使用正向协调算法计算该两个路口之间协调相位;
[0117]
s1016.计算路口i与路口i+1的反向协调相位,当类型为反向协调时,进入s1016-s1020,其中,路口顺序根据倒序进行重新排序后进行计算:
[0118]
s1017.计算路口i与路口i-1的反向协调相位,其中,i=n、n-1、.....1,n为路口序号;
[0119]
c、当为反向协调时,路口i与路口i-1的协调相位相位差为1的协调相位相位差为
[0120]
d、重复以上步骤计算路口i-1与路口i-2的协调相位差,直至最后一个路口完成计算,生成第一次循环后各路口初始相位差(反向)列表为[o
1|r
、o
2|r
、...o
n|r
];
[0121]
s1018.计算路口相对第一个路口修正后的相位差(正向相位差)列表为[o1、o2、o3...on],o1=0,o2=(o
2|r-o
1|r-δt
2|fr
)mod c2.......on=[o
n|r-(o
n-1|r
+...+o
3|r
+o
2|r
)-δt
n|fr
]mod cn;
[0122]
s1019.获取是否存在关键路口,若不存在关键路口,所有路口最终协调相位差即为s1017所示,若存在关键路口对最终协调相位差进行修改,关键路口最终协调相位差ok=0,关键路口相位差修正量为δo=0-ok;
[0123]
s1020.计算其他路口最终协调相位差,最终所有路口协调相位差为[0+δo、o2+δo、o3+δo、、...on+δo],此时为反向协调相位的相位差;
[0124]
s1021.路口n的信号机相位差=(协调相位的相位差-协调相位距离第一相位开始时刻的长度)mod cn。
[0125]
根据本技术的一些实施例的第二方面,提供了一种道路绿波优化系统,包括一个存储器,被配置为存储数据及指令;一个与存储器建立通信的处理器,其中,当执行存储器中的指令时,所述处理器被配置为:确定绿波场景,获取绿波道路优化控制策略表;划分绿波时段,包括获取计算日期的日期类型;获取运行方案,确定最小饱和度对应的方案为协调
时段方案;生成协调相位,包括获取所述协调时段方案的相位参数;计算路口配时,获取配置的调度计划及时段;确定绿波周期,确定与公共周期偏差最小的优化周期为绿波协调周期;确定绿波带速,计算每个路段数据的三四分位数为协调带速值;生成绿波方案,根据绿波道路原始相位差调整相位差。
[0126]
因此,根据本技术的一些实施例的道路绿波优化算法及系统,根据路口车流量和路段车辆速度计算路口相位配时和区域中多条路段的相位差,提高车辆通行能力,缓解区域交通压力。
附图说明
[0127]
为更好地理解并阐述本技术的一些实施例,以下将结合附图参考实施例的描述,在这些附图中,同样的数字编号在附图中指示相应的部分。
[0128]
图1是根据本技术的一些实施例提供的道路绿波优化系统的示例性示意图。
[0129]
图2是根据本技术的一些实施例提供的道路绿波优化算法的示例性流程图。
具体实施方式
[0130]
以下参考附图的描述为便于综合理解由权利要求及其等效内容所定义的本技术的各种实施例。这些实施例包括各种特定细节以便于理解,但这些仅被视为示例性的。因此,本领域技术人员可以理解对在此描述的各种实施例进行各种变化和修改而不会脱离本技术的范围和精神。另外,为简要并清楚地描述本技术,本技术将省略对公知功能和结构的描述。
[0131]
在以下说明书和权利要求书中使用的术语和短语不限于字面含义,而是仅为能够清楚和一致地理解本技术。因此,对于本领域技术人员,可以理解,提供对本技术各种实施例的描述仅仅是为说明的目的,而不是限制所附权利要求及其等效定义的本技术。
[0132]
下面将结合本技术一些实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
[0133]
需要说明的是,在本技术实施例中使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本技术。在本技术实施例和所附权利要求书中所使用的单数形式的“一”、“一个”、“一种”、“所述”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义。还应当理解,本技术中使用的术语“和/或”是指并包含一个或多个相绑定的列出项目的任何或所有可能组合。表达“第一”、“第二”、“所述第一”和“所述第二”是用于修饰相应元件而不考虑顺序或者重要性,仅仅被用于区分一种元件与另一元件,而不限制相应元件。
[0134]
根据本技术一些实施例的终端可以是智能终端,平台,装备和/或电子设备等;该智能终端可以包括车载终端等。该平台可以包括云端平台等,所述平台可以包括由一个或多个电子设备组成的系统平台;该装备可以包括智能网联车辆(intelligent connected vehicle,icv);该电子设备可以包括个人电脑(pc,例如平板电脑、台式电脑、笔记本、上网本、掌上电脑pda)、客户端设备、虚拟现实设备(vr)、增强现实设备(ar)、混合现实设备(mr)、xr设备、渲染机、智能手机、移动电话、电子书阅读器、便携式多媒体播放器(pmp)、音
频/视频播放器(mp3/mp4)、摄像机和可穿戴设备等中的一种或几种的组合。根据本技术的一些实施例,所述可穿戴设备可以包括附件类型(例如手表、戒指、手环、眼镜、或头戴式装置(hmd))、集成类型(例如电子服装)、装饰类型(例如皮肤垫、纹身或内置电子装置)等,或几种的组合。在本技术的一些实施例中,所述电子设备可以是灵活的,不限于上述设备,或者可以是上述各种设备中的一种或几种的组合。在本技术中,术语“用户”可以指示使用电子设备的人或使用电子设备的设备(例如人工智能电子设备)。
[0135]
本技术实施例提供了一种道路绿波优化算法及系统。为了便于理解本技术实施例,以下将参考附图对本技术实施例进行详细描述。
[0136]
图1是根据本技术的一些实施例提供的道路绿波优化系统的示例性示意图。如图1所述,道路绿波优化系统100可以包括网络110、控制端120、用户端130和服务器140等。具体的,控制端120与用户端130在通过网络建立通信,例如,控制端120与用户端130可以在同一个局域网(比如,同一个路由器的网络环境等)中通信。进一步,控制端120可以通过有线(例如,网线等)或无线(例如,云端服务器等)等方式与网络110连接,用户端130可以通过有线或无线(例如,wifi等)等方式与网络110建立通信连接。在一些实施例中,用户端130可以向控制端120、服务器140发送车辆实时信息等。进一步地,控制端120、服务器140可以向用户端130反馈绿波方案、道路等级数据等。作为示例,服务器140和/或控制端120可以基于路侧设备获取道路等级数据,或根据路侧设备的地图数据获取道路走向信息等。
[0137]
根据本技术的一些实施例,控制端120、用户端130可以为相同或不同的终端设备等。所述终端设备可以包括但不限于智能终端,云端平台,移动终端,计算机等。在智能交通场景中,控制端120可以包括云控平台等,用户端130可以包括网联车辆等。在一些实施例中,控制端120和用户端130可以集成在一个设备中,例如,车载终端等。在一些实施例中,服务器140是计算机的一种,具有比普通计算机运行更快、负载更高等优势,而相对应的价格更高昂。在网络环境中,服务器可以为其它客户机(例如,pc机、智能手机、atm等终端,以及交通系统等大型设备)提供计算或者应用服务。服务器具有高速的cpu运算能力、长时间的可靠运行、强大的i/o外部数据吞吐能力以及更好的扩展性。所述服务器可以提供的服务包括但不限于承担响应服务请求、承担服务、保障服务的能力等。所述服务器作为电子设备,具有极其复杂的内部结构,包括与普通计算机相近的内部结构等,作为示例,所述服务器的内部结构可以包括中央处理器(central processing unit,cpu)、硬盘、内存,系统、系统总线等。
[0138]
在本技术的一些实施例中,道路绿波优化系统100可以省略一个或多个元件,或者可以进一步包括一个或多个其它元件。作为示例,道路绿波优化系统100可以包括多个用户端130,如多个智能车辆等。又例如,道路绿波优化系统100可以包括一个或多个控制端120。再例如,道路绿波优化系统100可以包括多个服务器140等。在一些实施例中,道路绿波优化系统100可以包括但不限于基于城市智能交通场景处理的系统。网络110可以为任意类型的通信网络,所述通信网络可以包括计算机网络(例如,局域网(lan,local area network)或广域网(wan,wide area network))、互联网和/或电话网络等,或几种的组合。在一些实施例中,网络110可以为其他类型的无线通信网络。所述无线通信可以包括微波通信和/或卫星通信等。所述无线通信可以包括蜂窝通信,例如,全球移动通信(gsm,global system for mobile communications)、码分多址(cdma,code division multiple access)、第三代移
动通信(3g,the 3rd generation telecommunication)、第四代移动通信(4g)、第五代移动通信(5g)、第六代移动通信(6g)、长期演进技术(lte,long term evolution)、长期演进技术升级版(lte-a,lte-advanced)、宽带码分多址(wcdma,wideband code division multiple access)、通用移动通信系统(umts,universal mobile telecommunications system)、无线宽带(wibro,wireless broadband)等,或几种的组合。在一些实施例中,用户端130可以为其他具备同等功能模块的装备和/或电子设备,该装备和/或电子设备可以包括智能网联车辆(intelligent connected vehicle,icv)、虚拟现实设备(vr)、渲染机、个人电脑(pc,例如平板电脑、台式电脑、笔记本、上网本、掌上电脑pda)、智能手机、移动电话、电子书阅读器、便携式多媒体播放器(pmp)、音频/视频播放器(mp3/mp4)、摄像机和可穿戴设备等中的一种或几种的组合。
[0139]
在一些实施例中,所述wifi可以为其他类型的无线通信技术。根据本技术的一些实施例,所述无线通信可以包括无线局域网(wifi,wireless fidelity)、蓝牙、低功耗蓝牙(ble,bluetooth low energy)、紫蜂协议(zigbee)、近场通讯(nfc,near field communication)、磁安全传输、射频和体域网(ban,body area network)等,或几种的组合。根据本技术的一些实施例,所述有线通信可以包括全球导航卫星系统(glonass/gnss,global navigation satellite system)、全球定位系统(gps,global position system)、北斗导航卫星系统或伽利略(欧洲全球卫星导航系统)等。所述有线通信可以包括通用串行总线(usb,universal serial bus)、高清多媒体接口(hdmi,high-definition multimedia interface)、推荐标准232(rs-232,recommend standard 232)、和/或简易老式电话服务(pots,plain old telephone service)等,或几种的组合。
[0140]
需要说明的是,以上对于道路绿波优化系统100的描述,仅为描述方便,并不能把本技术限制在所举实施例的范围之内。可以理解,对于本领域技术人员,基于本系统的原理,可能在不背离该原理的前提下,对各个元件进行任意组合,或者构成子系统与其他元件连接,对实施上述方法和系统的应用领域进行形式和细节上的各种修正和改变。例如,服务器140和/或控制端120可以通过路侧设备等获取地图数据、道路等级数据等。诸如此类的变形,均在本技术的保护范围之内。
[0141]
图2是根据本技术的一些实施例提供的道路绿波优化算法的示例性流程图。如图2所述,流程200可以通过道路绿波优化系统100实现。在一些实施例中,所述道路绿波优化算法200可以自动启动或通过指令启动。所述指令可以包括系统指令、设备指令、用户指令、动作指令等,或几种的组合。
[0142]
在201,确定绿波场景,获取绿波道路优化控制策略表。操作201可以通过道路绿波优化系统100的控制端120实现。在一些实施例中,控制端120可以确定绿波场景,获取绿波道路优化控制策略表。在一些实施例中,控制端120和/或服务器140可以根据绿波道路优化控制策略表确定绿波场景等。
[0143]
作为示例,所述确定绿波场景,获取绿波道路优化控制策略表,具体包括获取待优化的绿波道路列表,包括绿波道路优化优先级、绿波道路关键交叉口;获取待优化的绿波道路参数数据,所述参数数据包括关联路口、路口顺序、路口间距、路口;获取至少两个绿波道路组团,每个所述绿波道路组团包括存在相同路口的绿波道路,后续分别对每个所述绿波道路组团的绿波道路进行优化。
[0144]
在202,划分绿波时段,包括获取计算日期的日期类型。操作202可以通过道路绿波优化系统100的控制端120、服务器140实现。在一些实施例中,控制端120和/或服务器140可以划分绿波时段,包括获取计算日期的日期类型。
[0145]
作为示例,所述划分绿波时段,具体包括:
[0146]
s301.获取计算日期的日期类型,当计算前一天时,所述日期类型为前一天;
[0147]
s302.获取每一所述绿波道路组团内的所有关键交叉口;
[0148]
s303.获取s302中所述日期类型的所有所述关键交叉口每个车道每5分钟的车道基准流量,计算所述日期类型的24小时中每5分钟的基准流量之和为:
[0149][0150]
s304.抽取数据f
i=1....288
,生成初始余数集为s305.查找最大数据fi及其序号i;
[0151]
s306.设置本组数据比对阈值αfi,生成第一组数据对应余数集为
[0152]
s307.以fi数据为起点向两侧比对数据,即以序号i位数据fi分别与向前序号i-1数据f
i-1
和向后序号i+1位数据f
i+1
进行比对,确定偏差β;
[0153]
s308.判断β与阈值αfi关系;
[0154]
s309.若β≤αfi,则序号i-1位数据f
i-1
和序号i+1位数据f
i+1
与序号i位数据fi同属一组,更新本组数据集为对应余数集为
[0155]
s310.继续比对序号i-2位数据f
i-2
和序号i+2位数据f
i+2
与序号i位数据fi的偏差β;
[0156]
s311.若β≤αfi,更新本组数据集为对应余数集为
[0157]
s312.继续比对序号i-m位数据f
i-m
和序号i+n位数据f
i+n
与序号i位数据fi的偏差β;
[0158]
s313.若β≤αfi,更新本组数据集为对应余数集为其中,余数集中的i-m和i+n表示依次循环比对后,用于确定是否需放入本组数据集;
[0159]
s314.若β》αfi,序号i-m位数据f
i-m
和序号i+n位数据f
i+n
与序号i位数据fi不属一组,即第一组数据集为s311所示结果,第一组数据集的最大值为fi;
[0160]
s315.在余数集继续选择最大值,即序号k位数据fk,生成第二组数据对应余数集为
[0161]
s316.以序号k位数据fk为起点向两侧比对数据,即以序号k位数据fk分别与向前序号k-1位数据f
k-1
和向后序号k+1位数据f
k+1
进行比对,确定偏差β;
[0162]
s317.判断序号k前后的比对序号k-1位数据f
k-1
和序号k+1位数据f
k+1
是否在余数集dr中,若在余数集dr中,所对应的方向搜索继续,若不在余数集dr中,所对应的方向搜索结束;
[0163]
s318.重复s309-s317,确定第二组数据集为第二组数据集的最大值为fk,对应余数集为余数集中的i-m和i+n用于表示依次循环比对后,是否需放入本组数据集;
[0164]
s319.重复s309-s318,直至余数集dr中无剩余数据,根据原始数据序号将x组数据d1,d2..d
x
进行重新排序,即:
[0165][0166]
比对每组数据集的数据个数,当某一组数据集d
x
中的数据个数少于γ时,将该组数据集d
x
合并至d
x
在d
1、2...x
数据集排序中的前一组或后一组数据集中;
[0167]
s320.和分别表示前一组和后一组数据集,判断判断的大小;当将d
x
数据集合并至数据集中;当将d
x
数据集合并至数据集中;当对比判断与d
x
数据集的所有数据的差值绝对值之和与maxd
x
与数据集的所有数据的差值绝对值之和的大小,将d
x
合并至差值绝对值之和较小的数据集中;
[0168]
s321.根据重新划分的数据集:
[0169]
进行数据集分析;
[0170]
s322.输出所述日期类型中24小时的时段划分结果:
[0171]
(0、g*15/60)、(g*15/60、h*15/60)、(h*15/60、k*15/60、)......((j+1)*15/60、24:00)。
[0172]
在203,获取运行方案,确定最小饱和度对应的方案为协调时段方案。操作203可以通过道路绿波优化系统100的控制端120、服务器140实现。在一些实施例中,控制端120和/或服务器140可以获取运行方案,确定最小饱和度对应的方案为协调时段方案。
[0173]
作为示例,所述划分绿波时段,具体包括:
[0174]
s401.获取已存在时段的绿波道路的配置方案,并对更新时段划分的绿波道路进行时段方案匹配;
[0175]
s402.根据所述时段划分结果,分别获取每个路口在所述日期类型下该时段内的至少两个方案;
[0176]
s403.获取每个路口的每个车道的5分钟基准流量和∑f
b-5
;
[0177]
s404.计算s402获取的每个方案小时通行能力ch;
[0178]
s405.计算每个方案饱和度∑f
b-5
/ch;
[0179]
s406.确定至少两个饱和度∑f
b-5
/ch中的最小值对应的方案为路口协调时段方案。
[0180]
在204,生成协调相位,包括获取所述协调时段方案的相位参数。操作204可以通过道路绿波优化系统100的服务器140和/或控制端120实现。在一些实施例中,服务器140和/或控制端120可以生成协调相位,包括获取所述协调时段方案的相位参数。
[0181]
例如,所述生成协调相位,具体包括:
[0182]
s501.获取已存在时段的绿波道路的协调相位,并基于所述时段方案对更新时段划分的绿波道路进行协调相位匹配;
[0183]
s502.获取绿波道路所有路口的内部转向关系,若获取成功继续,若获取失败退出当前绿波道路优化;
[0184]
s503.获取绿波道路上下游路段及路口的关联关系,若获取成功继续,若获取失败退出当前绿波道路优化;
[0185]
s504.根据绿波道路上下游路口的关联关系,分别获取绿波道路的每个路口正、反向协调流向;
[0186]
s505.判断经过上游路段-连接路口-下游路段方位,以获取两个路段及连接路口的关联关系,判断开始路段与结束路段分别位于连接路口的方向,通过路口的转向开始方向至路口的转向结束方向判断该路口的转向车道;
[0187]
s506.根据s505正反向转向车道获取相位参数,并获取当前时段方案的当前转向车道在该路口的所处相位,若存在至少两个相位,按相位相序排列所述至少两个相位,作为协调相位。
[0188]
在205,计算路口配时,获取配置的调度计划及时段。操作205可以通过道路绿波优化系统100的服务器140和/或控制端120实现。在一些实施例中,服务器140和/或控制端120可以计算路口配时,获取配置的调度计划及时段。
[0189]
作为示例,所述计算路口配时,获取配置的调度计划及时段,具体包括:
[0190]
s601.获取已存在时段的绿波道路的调度计划及时段,并获取各路口的初始配时参数;
[0191]
s602.根据所述调度计划及时段,获取每个路口该时段内各车道每5分钟基准流量之和∑f
b-5
,对获取成功的路口进行配时优化,对未获取的路口配置初始配时参数;
[0192]
s603.将∑f
b-5
换算至路口小时流量ti为时段划分后的小时时段长度;
[0193]
s604.获取路口车道渠化信息、所述时段方案的相位相序、车道通行能力以及周期时长t0;
[0194]
s605.计算该时段下各车道流量比其中,fh为车道小时流量,c
x
为车道小时饱和流率的配置值;
[0195]
s606.确定当前所述时段方案的各相位最大流量比yi=max[y
x
],其中,i代表相位号,若多个相位中存在同一个车道时,对不同相位中的同一车道赋值相同;
[0196]
s607.计算路口各相位最大流量比之和y=∑yi;
[0197]
s608.计算所述时段方案的绿灯损失时间l=∑(li+i
i-ai),其中,相位i的信号损失时间为li,绿灯间隔时间ii,黄灯时间ai)
[0198]
s609.判断y值区间,若y<0.7,周期时长若0.7≤y<1,周期时长c0=1.23le
(2.46-0.02l)*y
;若1≤y,退出;
[0199]
s610.判断周期时长;
[0200]
s611.若c0≤t0+30&c0<=180,则c0=c0;
[0201]
s612.若c0≤t0+30&c0>180,则c0=180;
[0202]
s613.若c0>t0+30&c0<=180,则c0=t0+30;
[0203]
s614.若c0>t0+30&c0>180,则c0=180;
[0204]
s615.计算周期有效绿灯时长ge=c
0-l;
[0205]
s616.计算各相位流量比占流量比之和的比例
[0206]
s617.计算各相位有效绿灯时长
[0207]
s618.计算各相位显示绿灯时间gli=max(g
ei
、g
min
)+l
i-ai,其中,g
min
当前时段关联的所有相位的最小绿灯时长,max取最大值;
[0208]
s619.计算优化周期为c0=∑(gli+ii)。
[0209]
在206,确定绿波周期,确定与公共周期偏差最小的优化周期为绿波协调周期。操作206可以通过道路绿波优化系统100的服务器140和/或控制端120实现。在一些实施例中,服务器140和/或控制端120可以确定绿波周期,确定与公共周期偏差最小的优化周期为绿波协调周期。
[0210]
作为示例,所述确定绿波周期,确定与公共周期偏差最小的优化周期为绿波协调周期,具体包括:
[0211]
s701.获取绿波道路组团的所有关键路口优化周期ci;
[0212]
s702.确定公共周期为maxci;
[0213]
s703.判断每个路口优化周期与maxci的差值,确定maxci与路口优化周期的最小差值对应路口绿波协调周期c
co
;
[0214]
s704.计算匹配绿波协调周期的每个路口各相位绿灯时长
[0215]
在207,确定绿波带速,计算每个路段数据的三四分位数为协调带速值。操作207可以通过道路绿波优化系统100的服务器140和/或控制端120实现。在一些实施例中,服务器140和/或控制端120可以确定绿波带速,计算每个路段数据的三四分位数为协调带速值。
[0216]
作为示例,所述确定绿波带速,计算每个路段数据的三四分位数为协调带速值,具体包括:
[0217]
s801.获取绿波道路沿线的每一路口连续n个相同日期类型当前计算时段内的正、反向协调流向的速度vi;
[0218]
s802.计算每一路口速度值的三四分位数;
[0219]
s803.确定每个第三四分位数为路口正反向的协调带速值。。
[0220]
在208,生成绿波方案,根据绿波道路原始相位差调整相位差。操作208可以通过道路绿波优化系统100的服务器140和/或控制端120实现。在一些实施例中,服务器140和/或控制端120可以生成绿波方案,根据绿波道路原始相位差调整相位差。
[0221]
作为示例,所述生成绿波方案,根据绿波道路原始相位差调整相位差,具体包括:
[0222]
s901.根据每一绿波道路组团,计算每个组团的各绿波道路原始相位差;
[0223]
s902.根据绿波道路组团的优化优先级顺序,调整路口相位差;
[0224]
s903.生成两个数组,包括第一数组
①
未调整相位差绿波道路数组,第二数组
②
已调整相位差绿波道路数组;
[0225]
e、在第一数组
①
中获取优化优先级顺序最小的绿波道路,若无数据即完成调整,若有数据程序继续循环调整;
[0226]
f、在第二数组
②
中获取优化优先级顺序最大的绿波道路,若无数据,将a获取的绿波道路放入
②
中,在
①
中删除该绿波道路,所述绿波道路各路口相位差不变;若有数据,判断
②
中获取的绿波道路与
①
中的绿波道路是否存在关联路口,若存在且至少两个,确定道路等级更高的交叉路口作为基准路口,调整
①
中获取的绿波道路所有路口相位差,将调整后的该绿波道路由第一数组
①
转移至第二数组
②
;所述调整相位差包括:
[0227]
所述交叉路口在第二数组
②
的绿波道路中的相位差为t0,在第一数组
①
中获取的绿波道路中的相位差为t1,则相位差偏差为t
0-t1,第一数组
①
中获取的绿波道路其他路口调整后的相位差为[t
i-(t
1-t0)]mod ci;
[0228]
s904.重复以上s903,直至第一数组
①
中无绿波道路的数据。
[0229]
根据本技术的一些实施例,流程200可以进一步包括计算绿波道路相位差等。作为示例,所述计算绿波道路相位差,具体包括:
[0230]
s1001.获取绿波道路参数,包括绿波道路编号、路口序号、路口编号、关键路口,每一绿波道路至多设置一个关键路口;路口宽度wi、路口正向间距li→
i+1
、路口反向间距li→
i-1
其中,i=1....n,n为路口数量;
[0231]
s1002.获取路口i的配时参数,正向协调相位绿灯时长t
i|f
、反向协调相位绿灯时长t
i|r
、正反向协调相位绿灯开启时间差δt
i|fr
;
[0232]
s1003.获取路口i的正向协调带速vi→
i+1
、反向协调带速vi→
i-1
;
[0233]
s1004.获取路口i的正向协调相位相位差o
i|f
、反向协调相位相位差o
i|r
=o
i|f
+δt
i|fr
;
[0234]
s1005.获取路口i的周期ci;
[0235]
s1006.获取当前协调类型,包括双向协调、正向协调、反向协调;
[0236]
s1007.计算路口i与路口i+1的双向协调相位,当类型为双向协调时,进入s1007-s1011:s、初始固定路口i的正向协调相位相位差o
i|f
=0,反向协调相位相位差o
i|r
=δt
i|fr
;
[0237]
t、计算路口i+1的正向协调相位相位差反向协调相位相位差o
i+1|r
=o
i+1|f
+δt
i+1|fr
;其中,路口i+1相位差分别由0至c
i+1
循环遍历;
[0238]
u、判断此时路口i、路口i+1是否形成双向绿波,若形成双向绿波,记录正向带宽bi→
i+1|f
,反向带宽b
i+1
→
i|r
;包括步骤d-g:
[0239]
v、判断此时正向是否形成协调相位:[mc
i+1
+o
i+1|f
、mc
i+1
+o
i+1|f
+t
i+1|f
],其中,m为大于等于0的整数;存在m使[mc
i+1
+o
i+1|f
、mc
i+1
+o
i+1|f
+t
i+1|f
]存在重叠部分,即路口i+1的正向协调相位相位差为o
i+1|f
,
[0240]
w、判断此时反向是否形成协调相位:[nci+o
i|r
、nci+o
i|r
+t
i|r
],其中,n为大于等于0的整数;存在n使[nci+o
i|r
、nci+o
i|r
+t
i|r
]存在重叠部分,即路口i+1的反向协调相位相位差为o
i+1|f
,此时正向带宽:
[0241][0241]
其中,
[0242]
为处在重叠区间的点;
[0243]
x、反向带宽:
[0244][0244]
其中,
[0245]
为处在重叠区间的点;
[0246]
y、当路口i、路口i+1形成双向绿波,即同时满足d、e步骤时,计算b=bi→
i+1|r
+b
i+1
→
i|r
,获取maxb所对应的路口i+1的正向协调相位相位差为o
i+1f
为路口i与路口i+1之间的双向协调相位差;若当maxb存在至少两个值时,获取正向、反向带宽偏差的较小值,当此时仍存在多个值时,确定路口i+1正向协调相位相位差为o
i+1|f
的较小值;
[0247]
z、当路口i、路口i+1无法形成双向绿波,即不满足双向协调条件时,确定为正向协调,并计算路口i与路口i+1的协调相位相位差为
[0248]
aa、记录路口i与路口i+1是否形成双向协调,若否记录为0,若是记录为1,路口i+1相对路口i相位差为o
i+1|f
;
[0249]
s1008.重复以上步骤,计算路口i+1与路口i+2的协调相位差,直至最后一个路口完成计算,生成最后的结果列表[0、o
2|f
、o
3|f
、、...o
n|f
];
[0250]
s1009.计算路口相对第一个路口修正后的相位差为[0、o2、o3、、...on],o2=o
2|f
,o3=(o
3|f
+o
2|f
)mod c3,o4=(o
4|f
+o
3|f
+o
2|f
)mod c4,on=(o
n-1|f
+...+o
3|f
+o
2|f
)mod cn;
[0251]
s1010.获取是否存在关键路口,若不存在关键路口,所有路口的最终协调相位相位差即为s1008所示,若存在关键路口对最终协调相位差进行修改,关键路口最终协调相位差offk=0,关键路口相位差修正量为δo=0-ok,计算其他路口最终协调相位差;
[0252]
s1011.所有路口的最终协调相位相位差为[0+δo、(o2+δo)mod c2、(o3+δo)mod c3、、...(on+δo)mod cn];
[0253]
当不存在双向绿波协调,或满足条件时,单向协调带宽低于阈值时,使用正向协调算法计算所述两个路口之间的协调相位;
[0254]
s1012.计算路口i与路口i+1的正向协调相位,当类型为正向协调时,进入s1012-s1015:
[0255]
e、当为正向协调时,计算路口i与路口i+1的协调相位相位差为e、当为正向协调时,计算路口i与路口i+1的协调相位相位差为
[0256]
f、重复以上步骤计算路口i+1与路口i+2的协调相位差,直至最后一个路口完成计算,生成最后的结果列表
[0257]
s1013.计算路口相对第一个路口修正后的相位差为[0、o2、o3、、...on],
[0258][0259]
s1014.获取是否存在关键路口,若不存在关键路口,所有路口最终协调相位相位
差即为s1013所示,若存在关键路口对最终协调相位差进行修改,关键路口最终协调相位差offk=0,关键路口相位差修正量为δo=0-ok,计算其他路口最终协调相位差;
[0260]
s1015.所有路口的最终协调相位差为[0+δo、o2+δo、o3+δo、、...on+δo];
[0261]
当以上不存在双向绿波协调,或满足条件时,单向协调带宽低于阈值时,使用正向协调算法计算该两个路口之间协调相位;
[0262]
s1016.计算路口i与路口i+1的反向协调相位,当类型为反向协调时,进入s1016-s1020,其中,路口顺序根据倒序进行重新排序后进行计算:
[0263]
s1017.计算路口i与路口i-1的反向协调相位,其中,i=n、n-1、.....1,n为路口序号;
[0264]
e、当为反向协调时,路口i与路口i-1的协调相位相位差为1的协调相位相位差为
[0265]
f、重复以上步骤计算路口i-1与路口i-2的协调相位差,直至最后一个路口完成计算,生成第一次循环后各路口初始相位差(反向)列表为[o
1|r
、o
2|r
、...o
n|r
];
[0266]
s1018.计算路口相对第一个路口修正后的相位差(正向相位差)列表为[o1、o2、o3...on],o1=0,o2=(o
2|r-o
1|r-δt
2|fr
)mod c2.......on=[o
n|r-(o
n-1|r
+...+o
3|r
+o
2|r
)-δt
n|fr
]mod cn;
[0267]
s1019.获取是否存在关键路口,若不存在关键路口,所有路口最终协调相位差即为s1017所示,若存在关键路口对最终协调相位差进行修改,关键路口最终协调相位差ok=0,关键路口相位差修正量为δo=0-ok;
[0268]
s1020.计算其他路口最终协调相位差,最终所有路口协调相位差为[0+δo、o2+δo、o3+δo、、...on+δo],此时为反向协调相位的相位差;
[0269]
s1021.路口n的信号机相位差=(协调相位的相位差-协调相位距离第一相位开始时刻的长度)mod cn。
[0270]
根据本技术的一些实施例,所述绿波方案中关联车辆的数据信息可以在用户端130的用户界面(ui)中显示,所述数据信息的显示场景可以包括但不限于通过vr,ar,mr,xr任一形式或组合形式进行场景显示。所述数据信息可以包括但不限于速度信息、车道信息等中一种或几种的组合。
[0271]
需要说明的是,以上对于流程200的描述,仅为描述方便,并不能把本技术限制在所举实施例的范围之内。可以理解,对于本领域技术人员,基于本系统的原理,可能在不背离该原理的前提下,对各个操作进行任意组合,或者构成子流程与其它操作组合,对实施上述流程和操作的功能进行形式和细节上的各种修正和改变。例如,流程200可以进一步包括计算绿波道路相位差等操作。诸如此类的变形,均在本技术的保护范围之内。
[0272]
综上所述,根据本技术实施例的道路绿波优化算法及系统,根据路口车流量和路段车辆速度计算路口相位配时和区域中多条路段的相位差,提高车辆通行能力,缓解区域交通压力。
[0273]
需要注意的是,上述的实施例仅仅是用作示例,本技术不限于这样的示例,而是可以进行各种变化。
[0274]
需要说明的是,在本说明书中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
[0275]
最后,还需要说明的是,上述一系列处理不仅包括以这里所述的顺序按时间序列执行的处理,而且包括并行或分别地、而不是按时间顺序执行的处理。
[0276]
本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过计算机程序指令相关的硬件来完成,所述的程序可存储于一计算机可读存储介质中,该程序在执行时,可包括如上述各方法的实施例的流程。其中,所述的存储介质可为磁碟、光盘、只读存储器(read-only memory,rom)或随机存储器(random access memory,ram)等。
[0277]
以上所揭露的仅为本技术一些优选的实施例,不能以此来限定本技术之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本技术权利要求所作的等同变化,仍属于发明所涵盖的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1