一种自动驾驶无人出租车速度调控方法、系统及调度系统与流程
本发明涉及自动驾驶控制领域,特别是涉及一种自动驾驶无人出租车速度调控方法、系统及调度系统。
背景技术:
1、自动驾驶的无人出租车慢慢地变成了现实,但对于无人出租车的调度,特别是对进出高铁站或飞机场等场所的调度非常影响乘客的使用体验。在现有的技术中,通常只涉及某一具体路段(如从候车区到上客区之间)的调控,且经常只考虑车辆或交通道路情况,没办法对用户的进站时间等进行综合判断和计算,易造成站点的拥堵,致使用户体验不佳。
技术实现思路
1、本发明所要解决的技术问题在于,提供一种自动驾驶无人出租车速度调控方法、系统及调度系统。可以调控无人出租车行驶速度,缩短无人出租车进站停靠时间,减少站点的拥堵。
2、为解决上述技术问题,作为本发明的一方面,提供一种自动驾驶无人出租车速度调控方法,其至少包括如下步骤:
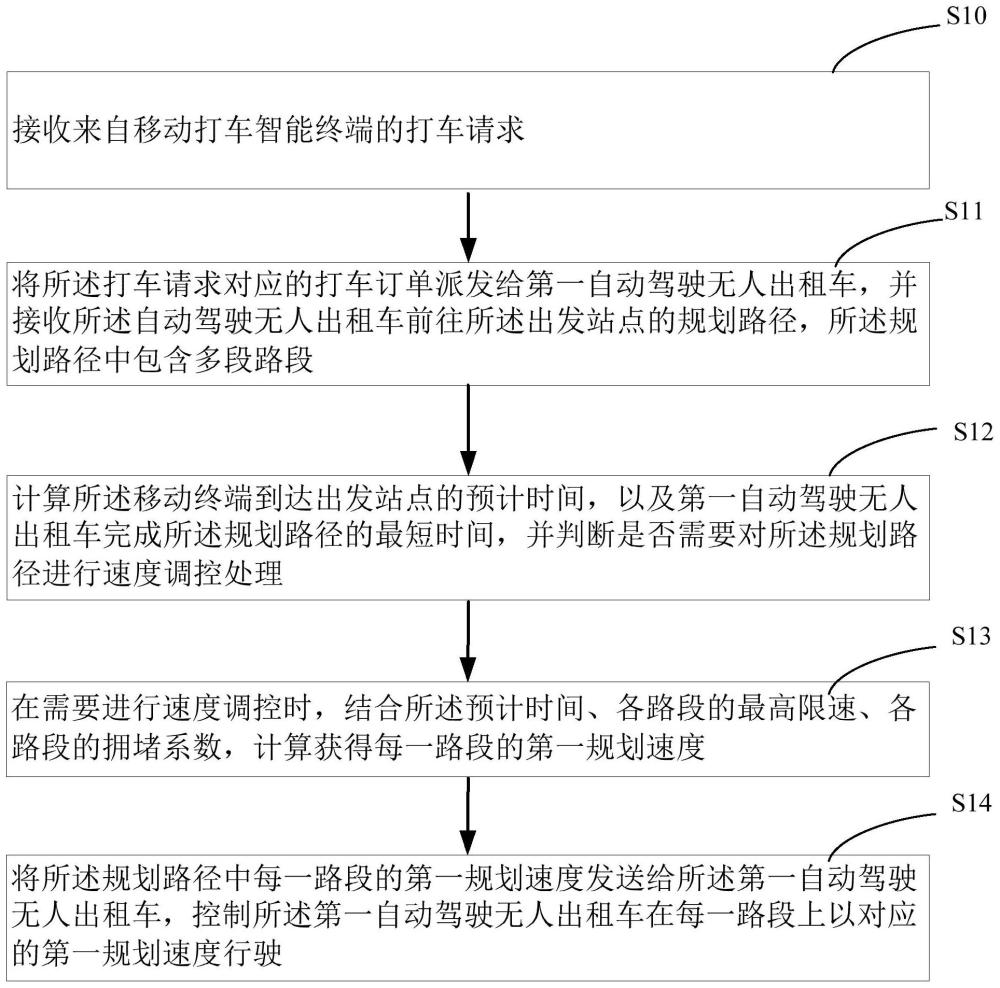
3、接收来自打车终端的打车请求,所述打车请求至少包括:出发站点、目的站点以及当前位置信息;
4、将所述打车请求对应的打车订单派发给第一自动驾驶无人出租车,并接收所述自动驾驶无人出租车前往所述出发站点的规划路径,所述规划路径中包含多段路段;
5、计算所述打车终端到达出发站点的预计时间,以及第一自动驾驶无人出租车完成所述规划路径的最短到达时间,并判断是否需要对所述规划路径进行速度调控处理;
6、在需要进行速度调控时,结合所述预计时间、各路段的最高限速、各路段的拥堵系数,计算获得每一路段的第一规划速度;
7、将所述规划路径中每一路段的第一规划速度发送给所述第一自动驾驶无人出租车,以控制所述第一自动驾驶无人出租车在每一路段上以对应的第一规划速度行驶。
8、其中,所述计算所述打车终端到达出发站点的预计时间,以及第一自动驾驶无人出租车完成所述规划路径的最短到达时间,根据所述预计时间以及所述最短到达时间判断是否需要对所述规划路径进行速度调控处理的步骤进一步包括:
9、当所述预计时间大于最短到达时间,则判断需要对所述规划进行速度调控处理;
10、当所述预计时间小于或等于最短到达时间,则判断无需对所述规划进行速度调控处理,将每一路段的最高限速发送给所述第一自动驾驶无人出租车,控制所述第一自动驾驶出租车在每一路段上以最高限速或自适应以当前拥堵状态的速度行驶。
11、其中,结合所述预计时间、各路段的最高限速、各路段的拥堵系数,计算获得每一路段的第一规划速度的步骤具体为:
12、根据各路段的拥堵系数,确定其中行驶通畅路段;
13、根据所述行驶通畅路段中对应的拥堵系数,平衡地降低各行驶通畅路段的最高限速度,获得每一路段的第一规划速度,以使第一自动驾驶无人出租车的行驶时间与所述预计时间的差值最小。
14、其中,进一步包括:
15、如果判断到存在所述第一自动驾驶无人出租车之前到达所述出发站点的第二自动驾驶无人出租车,且所述第二自动驾驶无人出租车离开出发站点的预计驶出时间晚于第一自动驾驶无人出租车的到达时间,则对所述第一自动驾驶无人出租车的剩余路段的速度进行重新调控,根据所述预计驶出时间,剩余各路段的最高限速、剩余各路段的拥堵系数,计算获得剩余各路段中每一路段的第二规划速度。
16、其中,根据所述预计驶出时间,剩余各路段的最高限速、剩余各路段的拥堵系数,计算获得剩余各路段中每一路段的第二规划速度的步骤具体为:
17、根据剩余各路段的拥堵系数,确定其中行驶通畅路段;
18、根据所述行驶通畅路段中对应的拥堵系数,平衡地降低剩余路段中各行驶通畅路段的第一规划速度,获得每一路段的第二规划速度,以使第一自动驾驶无人出租车的到达时间晚于所述第二自动驾驶无人出租车的预计驶出时间。
19、相应地,作为本发明的另一方面,还提供一种自动驾驶无人出租车速度调控方法,其至少包括如下步骤:
20、接收来自打车终端的打车请求,所述打车请求至少包括:出发站点、目的站点以及当前位置信息;
21、将所述打车请求对应的打车订单派发给一自动驾驶无人出租车,并接收所述自动驾驶无人出租车在接收到乘客后前往所述目的站点的规划路径,所述规划路径中包含多段路段;
22、将每一路段的最高限速发送给所述自动驾驶无人出租车,控制所述自动驾驶无人出租车在每一路段上以最高限速或自适应以当前拥堵状态的速度行驶,并计算自动驾驶无人出租车到达所述目的站点的最短到达时间;
23、根据所述最短到达时间确定需要对所述自动驾驶无人出租车的剩余路段的行驶速度进行重新调控时,计算获得剩余各路段中每一路段的规划速度;
24、将所述规划路径中每一路段的规划速度发送给所述自动驾驶无人出租车,以控制所述自动驾驶无人出租车在每一路段上以对应的规划速度行驶。
25、其中,根据所述最短到达时间确定需要对所述自动驾驶无人出租车的剩余路段的行驶速度进行重新调控时,计算获得剩余各路段中每一路段的规划速度的步骤具体为:
26、如果存在所述自动驾驶无人出租车之前到达所述目的站点的另一自动驾驶无人出租车,且另一自动驾驶无人出租车其驶出所述目的站点的预计驶出时间晚于自动驾驶无人出租车的到达时间,则确定需要对所述自动驾驶无人出租车的剩余路段的行驶速度进行重新调控;
27、根据剩余各路段的拥堵系数,确定其中行驶通畅路段;
28、根据所述行驶通畅路段中对应的拥堵系数,平衡地降低剩余路段中各行驶通畅路段的当前速度,获得每一路段的规划速度,以使自动驾驶无人出租车的到达时间晚于所述另一自动驾驶无人出租车的预计驶出时间。
29、其中,至少包括:
30、订单接入模块,用于接收来自打车终端的打车请求,所述打车请求至少包括:出发站点、目的站点以及当前位置信息;
31、订单分配模块,用于将所述打车请求对应的打车订单派发给第一自动驾驶无人出租车,并接收所述自动驾驶无人出租车前往所述出发站点的规划路径,所述规划路径中包含多段路段;
32、无人车调控模块,用于计算所述打车终端到达出发站点的预计时间,以及第一自动驾驶无人出租车完成所述规划路径的最短到达时间,根据所述预计时间以及所述最短到达时间判断是否需要对所述规划路径进行速度调控处理;如果需要进行速度调控,结合所述预计时间、各路段的最高限速、各路段的拥堵系数,计算获得每一路段的第一规划速度;将所述规划路径中每一路段的第一规划速度发送给所述第一自动驾驶无人出租车,以控制所述第一自动驾驶无人出租车在每一路段上以对应的第一规划速度行驶。
33、其中,所述无人车调控模块进一步包括:
34、第一计算单元,用于计算所述打车终端到达出发站点的预计时间,以及第一自动驾驶无人出租车完成所述规划路径的最短到达时间;
35、第一调控判断单元,用于根据所述预计时间以及所述最短到达时间判断是否需要对所述规划路径进行速度调控处理;其中,当所述预计时间大于最短到达时间,则判断需要对所述规划进行速度调控处理;当所述预计时间小于或等于最短到达时间,则判断无需对所述规划进行速度调控处理;
36、第一调控处理单元,用于在第一调控判断单元的判断结果为需要调控处理时,根据各路段的拥堵系数,确定其中行驶通畅路段,根据所述行驶通畅路段中对应的拥堵系数,平衡地降低各行驶通畅路段的最高限速度,获得每一路段的第一规划速度,以使第一自动驾驶无人出租车的行驶时间与所述预计时间的差值最小。
37、其中,所述无人车调控模块进一步包括:
38、第二调控判断单元,用于在判断到存在所述第一自动驾驶无人出租车之前到达所述出发站点的第二自动驾驶无人出租车,且所述第二自动驾驶无人出租车离开出发站点的预计驶出时间晚于第一自动驾驶无人出租车的到达时间,则判断需要对所述第一自动驾驶无人出租车的剩余路段的速度进行重新调控;
39、第二调控处理单元,用于根据剩余各路段的拥堵系数,确定其中行驶通畅路段;根据所述行驶通畅路段中对应的拥堵系数,平衡地降低剩余路段中各行驶通畅路段的第一规划速度,获得每一路段的第二规划速度,以使第一自动驾驶无人出租车的到达时间晚于所述第二自动驾驶无人出租车的预计驶出时间。
40、相应地,作为本发明的又一方面,还提供一种自动驾驶无人出租车速度调控系统,至少包括:
41、订单接入模块,用于接收来自打车终端的打车请求,所述打车请求至少包括:出发站点、目的站点以及当前位置信息;
42、订单分配模块,用于将所述打车请求对应的打车订单派发给一自动驾驶无人出租车,并接收所述自动驾驶无人出租车在接收到乘客后前往所述目的站点的规划路径,所述规划路径中包含多段路段;
43、无人车调控模块,用于将每一路段的最高限速发送给所述自动驾驶无人出租车,控制所述自动驾驶出租车在每一路段上以最高限速或自适应以当前拥堵状态的速度行驶,并计算自动驾驶无人出租车到达所述目的站点的最短到达时间;根据所述最短到达时间确定需要对所述自动驾驶无人出租车的剩余路段的行驶速度进行重新调控时,计算获得剩余各路段中每一路段的规划速度;将所述规划路径中每一路段的规划速度发送给所述自动驾驶无人出租车,以控制所述自动驾驶无人出租车在每一路段上以对应的规划速度行驶。
44、其中,所述无人车调控模块至少包括:
45、第二计算单元,用于计算自动驾驶无人出租车到达所述目的站点的最短到达时间;
46、速度调控判断单元,用于判断到存在所述自动驾驶无人出租车之前到达所述目的站点的另一自动驾驶无人出租车,且另一自动驾驶无人出租车其驶出所述目的站点的预计驶出时间晚于当前自动驾驶无人出租车的到达时间时,则确定对所述自动驾驶无人出租车的剩余路段的行驶速度进行重新调控;
47、速度调控处理单元,用于根据剩余各路段的拥堵系数,确定其中行驶通畅路段;并根据所述行驶通畅路段中对应的拥堵系数,平衡地降低剩余路段中各行驶通畅路段的速度,获得每一路段的规划速度,以使自动驾驶无人出租车的到达时间晚于所述第二自动驾驶无人出租车的预计驶出时间。
48、作为本发明的再一方面,还提供一种自动驾驶无人出租车调度系统,其至少包括:
49、多辆自动驾驶无人出租车;
50、打车管理平台,所述打车管理平台集成有前述的自动驾驶无人出租车速度调控系统。
51、实施本发明实施例,具有如下的有益效果:
52、本发明提供一种自动驾驶无人出租车速度调控方法、系统及调度系统。本发明中将规划路径划分为多个路段,通过打车管理平台实时采集用户、无人出租车位置、交通拥堵系数,以及其他无人出租车的进出站情况,可以对无人出租车规划路径中每一路段的行驶速度进行调控,从而从整体上缩短无人车进站停靠时间,减少站点的拥堵,提升站点运营效率;
53、本发明的实施例中,将乘客行为加入了调控的参考因素,有利于匹配用户的乘车需求,提供到站时间更精准的无人出租车服务。
- 还没有人留言评论。精彩留言会获得点赞!