一种临崖路段的识别方法以及道路交通安全隐患排查方法与流程
1.本发明属于道路安全技术领域,具体涉及一种临崖路段的识别方法以及道路交 通安全隐患排查方法。
背景技术:
2.近些年来我国大力开展道路基础设施建设,由于地形、地质、工程投资等 因素限制,实际道路建设中临崖路段标志标线、交通安全设施、交通组织、路 侧净区等设置不合理问题难以避免,易形成临崖隐患路段。临崖路段一般易发 生坠崖等事故,存在较高的致死率。2019年公安部交管局印发《公路交通事故 多发点段及严重安全隐患排查工作规范(试行)》,明确了路侧险要路段道路 交通安全隐患排查参考标准。
3.现有技术方案:
4.专利号为:cn202120037171.7的专利提供一种公路安全隐患排查装置,利用检 测车辆二次检测,对路段两侧的驾驶员视野、护栏完好程度进行信息收集,判断两 侧峡谷、沟壑和河流村在的安全风险。该专利并没有针对临崖路段道路交通安全隐 患排查流程的详细说明。
5.专利号为:cn201810008594.9的专利提供一种道路安全隐患检测系统,利用道 路信息数据采集系统和数据处理对比系统以及视频分析系统,经过高清网络摄像 机,采集需要检测的道路图像信息,经过互联网数据传输系统传递到数据对比检测 系统,数据对比检测系统会将对接收到的数据进行对比,根据国家规定的道路数据 要求,将不符合道路要求的路段检测标记实现对路侧险要路段隐患的检测。该专利 利用信息采集系统对场景数据进行采集,利用分析系统对数据处理对比分析。
6.专利号为:cn202111005220.x的专利提供一种全场景道路交通安全隐患排查方 法以及排查系统,其中有标准化数据采集、全场景道路交通安全隐患排查知识体系、 道路交通安全隐患场景智能化识别、生成道路交通安全隐患排查结论等,具体阐述 了道路交通安全隐患排查流程,该专利未对临崖路段特定场景进行针对性的排查知 识体系建立和隐患排查分析。
7.总体看来,当前临崖路段道路交通安全隐患排查无具体识别方法及侧重于路段 整体是否存在安全隐患认定,认定结果虽然涵盖了道路设计、安全设施等内容,但 排查方法缺乏理论支撑,同时对临崖路段内部详细隐患点段未进行细致性分析,排 查结果难以有效推进相关部门开展临崖路段道路交通安全隐患排查工作。
技术实现要素:
8.本发明通过提供一种临崖路段的识别方法以及道路交通安全隐患排查方法,通 过对临崖路段进行准确的识别判别,以及构建临崖路段道路交通安全隐患排查知识 体系,开展安全隐患标准化排查,生成临崖路段道路交通安全隐患排查结论,以解 决现在技术中存在的问题。
9.为实现上述目的,本发明的技术解决方案是:
10.一种临崖路段的识别方法,包括以下步骤:
11.step1:自动测量t时刻i点路侧边坡坡角θ(ti),坡角为地面与边坡坡面的夹角;
12.step2:计算t时刻路侧边坡瞬时坡度值α(ti),其中α(ti)=tanθ(ti);
13.step3:判断α(ti)是否大于1:3:
14.若α(ti)<1:3,则令t=t+δt,返回step1,其中δt为数据采集时间间隔;
15.若α(ti)>1:3,则进入step4;
16.step4:测量t时刻路侧边坡瞬时边坡坡长s(ti),计算边坡高度h(ti),其中 h(ti)=s(ti)
×
sinθ(ti);
17.step5:判断边坡高度h(ti)是否大于6:
18.若h(ti)<6,则令t=t+δt,返回step1;
19.若h(ti)>6,则该点属于临崖路段,进入step6;
20.step6:标记ti时刻坐标点为临崖路段起点p(t起);
21.step7:测量第i+1个点路侧边坡坡角θ(t
i+1
);
22.step8:计算t时刻路侧边坡瞬时坡度值α(t
i+1
);
23.step9:判断α(t
i+1
)是否小于1:3:
24.若α(t
i+1
)>1:3,则进入step10;
25.若α(t
i+1
)<1:3,则为临崖路段终点,进入step12;
26.step10:测量边坡坡长s(t
i+1
),计算边坡高度h(t
i+1
);
27.step11:判断h(t
i+1
)是否小于6:
28.若h(t
i+1
)>6,则令i=i+1,返回step7;
29.若h(t
i+1
)<6,则为临崖路段终点,进入step12;
30.step12:标记t
i+1
时刻坐标点为临崖路段终点p(t
终
)。
31.优选地,所述临崖路段为路肩挡墙、陡于1:3的填方边坡、路侧陡崖或深沟高 度大于6-8米的路段。
32.本发明还提供一种临崖路段的道路交通安全隐患排查方法,包括以下步骤:
33.(1)构建临崖路段道路交通安全隐患排查知识体系,该知识体系包含临崖路 段的基本信息以及在交通标志、交通标线、安全设施、交通组织、路侧净区中可能 存在的隐患类型,同时还包含隐患认定标准、隐患排查点位位置信息、隐患内容描 述及治理建议;
34.(2)基于车载高清摄像头、gps测量仪、陀螺仪、车速传感器、海拔测量仪、 激光测距仪等智能化前端设备,通过在改装车辆上布设多个高清摄像头,从左前方、 正前方、右前方不同方向进行多视角高频道路图像数据采集;利用gps测量仪采集 获取车辆行驶过程gps信息;依靠陀螺仪测量滚转角、俯仰角、偏航角信息;使用 车速传感器测量车速信息和海拔测量仪测量车辆行驶过程中海拔高度;使用激光测 距仪测量边坡坡长;
35.(3)依托车辆端设备自动化采集的视频、位置、时间相关标志标线数据,将 道路标志标线信息数字化,根据图片的gps信息,在地图上进行数据上图;
36.(4)通过图像ai识别公路里程碑、百米桩,将每一张图片建立电子桩号,为 隐患排查做数据基础,再通过公里桩号标定路段上下行方向;
37.(5)利用上述的临崖路段识别方法实现临崖路段智能化识别,确定临崖路段 对应
起终点位置信息;
38.(6)以构建的安全隐患排查知识体系为基础,对临崖路段从交通标志、交通 标线、安全设施、交通组织和路侧净区不同方面开展安全隐患排查工作;
39.(7)形成临崖路段道路交通安全隐患排查结论,包括临崖路段道路交通安全 隐患排查流程报告、临崖路段道路交通安全隐患单、基于隐患排查的总体报告。
40.优选地,所述步骤(1)中临崖路段所述交通标线包括上下游的对向车行道分 界线、同向车行道分界线、车行道边缘线、减速振动标线;所述交通标志包括上下 游的傍山险路标志、限制速度标志、解除限制速度标志、禁止超车标志与解除禁止 超车标志;所述安全设施包括示警柱、路侧护栏、轮廓标;所述交通组织包括路段 重型货运车辆混行情况和安全视距。
41.优选地,所述步骤(2)中各项信息采集完成后分别存储于相应设备存储中心, 利用时间标签完成不同数据特征匹配,构建标准化采集数据,为后续临崖路段识别 与安全隐患排查提供数据基础。
42.优选地,所述步骤(3)中还包括数据清洗,根据排查内容,人工从原始数据 清洗出需要进行专项排查的路段。
43.优选地,所述步骤(6)中所述的开展安全隐患排查工作为:首先通过基本信 息中路侧边坡坡度、路肩墙高度等参数对临崖路段进行识别和对道路设计不科学所 造成的安全隐患进行排查;然后依托于智能化采集图片对临崖路段交通标志、交通 标线、安全设施、交通组织、路侧净区各内容进行可视化排查;再依据构建安全隐 患排查知识体系中标准规定与临崖路段中存在安全隐患位置信息,确定排查交通标 志、交通标线、安全设施、交通组织、路侧净区等各项内容排查的最佳点位,根据 图像确认最佳视角下交通标志、交通标线、安全设施是否缺失,交通组织和路侧净 区是否存在安全隐患,判定交通标志、交通标线、安全设施是否完整,以图片标注 和文字总结形式输出隐患认定结果,完成安全隐患智能化排查。
44.优选地,所述步骤(7)中所述临崖路段道路交通安全隐患排查流程报告为对 临崖路段交通标志、交通标线、安全设施、交通组织与路侧净区排查结果进行汇总, 其作用在于确保排查流程完整性与正确性;所述临崖路段道路交通安全隐患单与基 于隐患排查的总体报告中从部分到整体对现存隐患内容进行分析,其作用在于面向 不同用户业务需求,在不同权限、范围内查看隐患排查结论。
45.本发明的有益效果是:
46.本发明提出了一种临崖路段道路交通安全隐患排查方法,该方法以推进相关部 门开展临崖路段道路交通安全隐患排查为原则,构建临崖路段道路交通安全隐患排 查知识体系,基于资料收集,通过前端智能化设备采集数据,系统性的路段清洗和 桩号标定,完成临崖路段智能化识别,依据图像和数据进行可视化排查,从交通标 志、交通标线、安全设施、交通组织、路侧净区等不同方面进行临崖路段的道路交 通安全隐患排查,生成隐患排查结果,进一步推动临崖路段道路交通安全隐患排查 工作。
附图说明
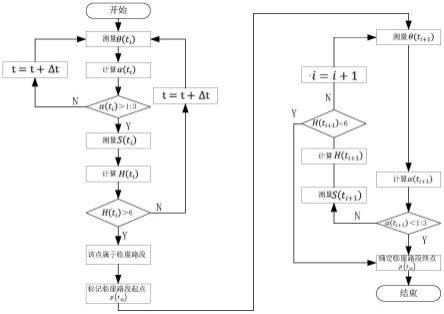
47.图1是临崖路段识别方法流程图。
48.图2是路侧边坡简易测量示意图。
49.图3是临崖路段道路交通安全隐患排查流程技术路线图。
具体实施方式
50.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、 完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的 实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提 下所获得的所有其他实施例,都属于本发明保护的范围。
51.另外,本发明各个实施例之间的技术方案可以相互结合,但是必须是以本领域 普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当 认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
52.实施例1
53.参见图1至图2,图1为临崖路段识别方法流程图;图2是路侧边坡简易测量 示意图。
54.依据《公路交通事故多发点段及严重安全隐患排查工作规范|试行》,确定了 临崖点段安全隐患排查参考标准如下:
55.临崖路段:路肩挡墙、陡于1:3的填方边坡、路侧陡崖或深沟高度大于一定值 (一般为6-8米)的路段。
56.基于上述临崖路段场景定义,以路侧边坡为例,临崖路段识别方法包括以下步 骤:
57.step1:自动测量t时刻i点路侧边坡坡角θ(ti),坡角为地面与边坡坡面的夹角;
58.step2:计算t时刻路侧边坡瞬时坡度值α(ti),其中α(ti)=tanθ(ti);
59.step3:判断α(ti)是否大于1:3:
60.若α(ti)<1:3,则令t=t+δt,返回step1,其中δt为数据采集时间间隔;
61.若α(ti)>1:3,则进入step4;
62.step4:测量t时刻路侧边坡瞬时边坡坡长s(ti),计算边坡高度h(ti),其中 h(ti)=s(ti)
×
sinθ(ti);
63.step5:判断边坡高度h(ti)是否大于6:
64.若h(ti)<6,则令t=t+δt,返回step1;
65.若h(ti)>6,则该点属于临崖路段,进入step6;
66.step6:标记ti时刻坐标点为临崖路段起点p(t
起
);
67.step7:测量第i+1个点路侧边坡坡角θ(t
i+1
);
68.step8:计算t时刻路侧边坡瞬时坡度值α(t
i+1
);
69.step9:判断α(t
i+1
)是否小于1:3:
70.若α(t
i+1
)>1:3,则进入step10;
71.若α(t
i+1
)<1:3,则为临崖路段终点,进入step12;
72.step10:测量边坡坡长s(t
i+1
),计算边坡高度h(t
i+1
);
73.step11:判断h(t
i+1
)是否小于6:
74.若h(t
i+1
)>6,则令i=i+1,返回step7;
75.若h(t
i+1
)<6,则为临崖路段终点,进入step12;
76.step12:标记t
i+1
时刻坐标点为临崖路段终点p(t终)。
77.实施例2
78.本发明针对现阶段临崖路段道路交通安全隐患排查方法存在的问题,构建临崖 路段道路交通安全隐患排查知识体系,基于资料收集,进行标准化数据采集,路段 清洗,完成系统性的桩号标定,实现路段智能化识别后,开展安全隐患标准化排查, 生成临崖路段道路交通安全隐患排查结论。临崖路段道路交通安全隐患排查流程技 术路线如图3所示。
79.一种临崖路段的道路交通安全隐患排查方法,包括以下步骤:
80.(1)临崖路段道路交通安全隐患排查涉及基本信息、交通标志、交通标线、 安全设施、交通组织、路侧净区等方面,实际道路交通安全隐患认定涉及众多法律、 规范,要实现全面细致对临崖路段道路交通安全隐患排查,需依托道路交通安全相 关标准,构建临崖路段道路交通安全隐患排查知识体系,该知识体系包含临崖路段 的基本信息以及在交通标志、交通标线、安全设施、交通组织、路侧净区中可能存 在的隐患类型,同时还包含隐患认定标准、隐患排查点位位置信息、隐患内容描述 及治理建议;
81.临崖路段所述交通标线包括上下游的对向车行道分界线、同向车行道分界线、 车行道边缘线、减速振动标线;所述交通标志包括上下游的傍山险路标志、限制速 度标志、解除限制速度标志、禁止超车标志与解除禁止超车标志;所述安全设施包 括示警柱、路侧护栏、轮廓标;所述交通组织包括路段重型货运车辆混行情况和安 全视距。
82.本发明构建的临崖路段道路交通安全隐患排查知识体系,不局限于对于临崖路 段隐患有无的认定,更重要在于确定路段安全隐患点段位置信息及隐患分析,从而 保证对临崖路段交通标志、交通标线、安全设施、交通组织和路侧净区隐患排查的 完整性与标准性。
83.(2)基于车载高清摄像头、gps测量仪、陀螺仪、车速传感器、海拔测量仪、 激光测距仪等智能化前端设备,通过在改装车辆上布设多个高清摄像头,从左前方、 正前方、右前方不同方向进行多视角高频道路图像数据采集;利用gps测量仪采集 获取车辆行驶过程gps信息;依靠陀螺仪测量滚转角、俯仰角、偏航角信息;使用 车速传感器测量车速信息和海拔测量仪测量车辆行驶过程中海拔高度;使用激光测 距仪测量边坡坡长;上述信息采集完成后分别存储于相应设备存储中心,利用时间 标签完成不同数据特征匹配,构建标准化采集数据,为后续临崖路段识别与安全隐 患排查提供数据基础。
84.(3)依托车辆端设备自动化采集的视频、位置、时间相关标志标线数据,将 道路标志标线信息数字化,根据图片的gps信息,在地图上进行数据上图;当进行 日常排查和专项排查时,采集的道路图像数据很可能具有重复性,尤其是路口,为 了保证排查道路图集的唯一性,需要清洗路段。清洗路段采用的是人工清洗,根据 排查内容,人工从原始数据清洗出需要进行专项排查的路段。
85.(4)通过图像ai识别公路里程碑、百米桩,将每一张图片建立电子桩号,为 隐患排查做数据基础,再通过公里桩号标定路段上下行方向;
86.使用前端采集设备中主相机和右侧相机图像,也可以通过人工进行二次确认。 在主图像中,人工找到有任意一个里程碑的图像,以采集设备中右侧相机图像为基 准,开口中心偏下位置,按钮标定里程碑。该图片即赋予图片中展示的电子桩号。 根据桩号信息,后
台自动判断出上下行方向。
87.(5)在开展临崖路段道路交通安全隐患排查工作时,临崖路段排查前需实现 临崖路段智能化识别,确定临崖路段对应起终点位置信息,智能化识别结合前端感 知与人工辅助手段双重认定。对前端感知手段确定路段范围内的边坡坡度、坡角等 路段基础参数进行识别计算,利用临崖路段感知判别算法与人工辅助手段将临崖路 段识别出来。
88.利用实施例1所述的临崖路段识别方法实现临崖路段智能化识别,确定临崖路 段对应起终点位置信息。
89.(6)以构建的安全隐患排查知识体系为基础,对临崖路段从交通标志、交通 标线、安全设施、交通组织和路侧净区不同方面开展安全隐患排查工作;
90.所述的开展安全隐患排查工作为:首先通过基本信息中路侧边坡坡度、路肩墙 高度等参数对临崖路段进行识别和对道路设计不科学所造成的安全隐患进行排查; 然后依托于智能化采集图片对临崖路段交通标志、交通标线、安全设施、交通组织、 路侧净区各内容进行可视化排查;再依据构建安全隐患排查知识体系中标准规定与 临崖路段中存在安全隐患位置信息,确定排查交通标志、交通标线、安全设施、交 通组织、路侧净区等各项内容排查的最佳点位,根据图像确认最佳视角下交通标志、 交通标线、安全设施是否缺失,交通组织和路侧净区是否存在安全隐患,判定交通 标志、交通标线、安全设施是否完整(遮挡、磨损、损坏等情况),以图片标注和 文字总结形式输出隐患认定结果,完成安全隐患智能化排查。
91.(7)形成临崖路段道路交通安全隐患排查结论,包括临崖路段道路交通安全 隐患排查流程报告、临崖路段道路交通安全隐患单、基于隐患排查的总体报告;
92.所述临崖路段道路交通安全隐患排查流程报告为对临崖路段交通标志、交通标 线、安全设施、交通组织与路侧净区排查结果进行汇总,其作用在于确保排查流程 完整性与正确性;所述临崖路段道路交通安全隐患单与基于隐患排查的总体报告中 从部分到整体对现存隐患内容进行分析,其作用在于面向不同用户业务需求,在不 同权限、范围内查看隐患排查结论。
93.本发明定义的上述排查报告依据排查工作规范中排查报告格式要求,便于道路 交通安全隐患排查工作中将排查结论上报相关部门,及后续安全隐患治理。
94.本发明基于临崖路段安全相关法律法规及规范梳理,构建了临崖路段道路交通 安全隐患排查知识体系,以相关部门道路交通安全隐患排查业务流程为导向,规范 化了从数据采集、路段清洗、桩号标定、路段识别、隐患排查到隐患结论生成的临 崖路段道路交通安全隐患排查流程。对临崖路段全面排查,包括交通标志、交通标 线、安全设施、交通组织和路侧净区等,基于最新国家标准、行业标准、部门规范 构建排查知识体系,以提供理论支撑,并基于安全隐患排查方法制定了不同层次隐 患排查报告,其结果能够推动相关部门开展安全隐患排查与治理工作。
95.以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本 发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它 相关的技术领域,均同理包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1