车辆轨迹数据驱动的驾驶行为安全度量与实时预警方法
本发明可应用于车辆车载系统中的安全驾驶辅助系统或安全预警平台。
背景技术:
1、随着社会汽车行业的不断发展,我国机动车保有量与道路交通量增长速度不断加快,交通安全也愈发受到关注,交通事故主要是由于驾驶员的不良驾驶行为造成的,驾驶员的驾驶行为对交通安全起到越来越重要的作用。
2、现有研究表明,不良驾驶行为的正确识别与及时预警,能够有效提醒驾驶员纠正驾驶行为,从而避免交通事故的发生。目前,对于驾驶行为的评价,大部分集中在对不良驾驶行为的评估,如对出现蛇形驾驶、速度不稳、频繁超车等不良驾驶行为的次数与幅度进行评估,缺少对车辆行驶过程中各种驾驶行为具体情况的综合评价;对于驾驶行为数据的采集,集中在车辆安装检测器、车内踏板数据采集器等,得到的结果很难普及到实际应用中,采用车辆行驶轨迹数据可以直观地表示出驾驶员的各种驾驶行为,通过车辆轨迹数据反映真实的交通情况,有助于评估各种交通运营和控制策略在交通安全方面的有效性。
3、目前,现有技术对驾驶行为更多的集中在不良驾驶行为的研究,缺少利用车辆轨迹数据对车辆行驶过程中各种驾驶行为具体情况的综合评价,缺少对驾驶行为的实时度量,也没有针对不同类型不良驾驶行为的个性化、操作性强的预警方案,因此,不能满足交通安全管理与控制的技术需求。
技术实现思路
1、有鉴于现有技术的上述缺陷,本发明的目的在于提供车辆轨迹数据驱动的驾驶行为安全度量与实时预警方法,本发明设计的技术方案包含以下步骤,具体包括:
2、s1:获取ngsim数据集中的车辆行驶轨迹数据;
3、s2:选取驾驶行为安全度量指标,驾驶行为安全度量指标包括行驶稳定度量指标、跟驰风险度量指标和换道安全度量指标;
4、s3:采用风险度量方法构建驾驶行为安全度量综合模型,通过行驶稳定度量指标、跟驰风险度量指标和换道安全度量指标综合评价驾驶员的驾驶行为;
5、s4:对行驶稳定性度量指标、跟驰风险度量指标和换道安全度量指标采用皮尔森相关系数法进行相关性分析;
6、s5:对行驶稳定性度量指标、跟驰风险度量指标和换道安全度量指标采用cartic赋权法计算各个指标的变异性和冲突性,得到各个指标的权重,然后进行加权得到驾驶行为安全度量综合模型;
7、s6:采用四分位差法提取行驶稳定度量指标、跟驰风险度量指标和换道安全度量指标的阈值;
8、s7:通过对驾驶行为安全度量综合模型进行聚类分析,结合行驶稳定度量指标、跟驰风险度量指标和换道安全度量指标的阈值,制定智能预警方案。
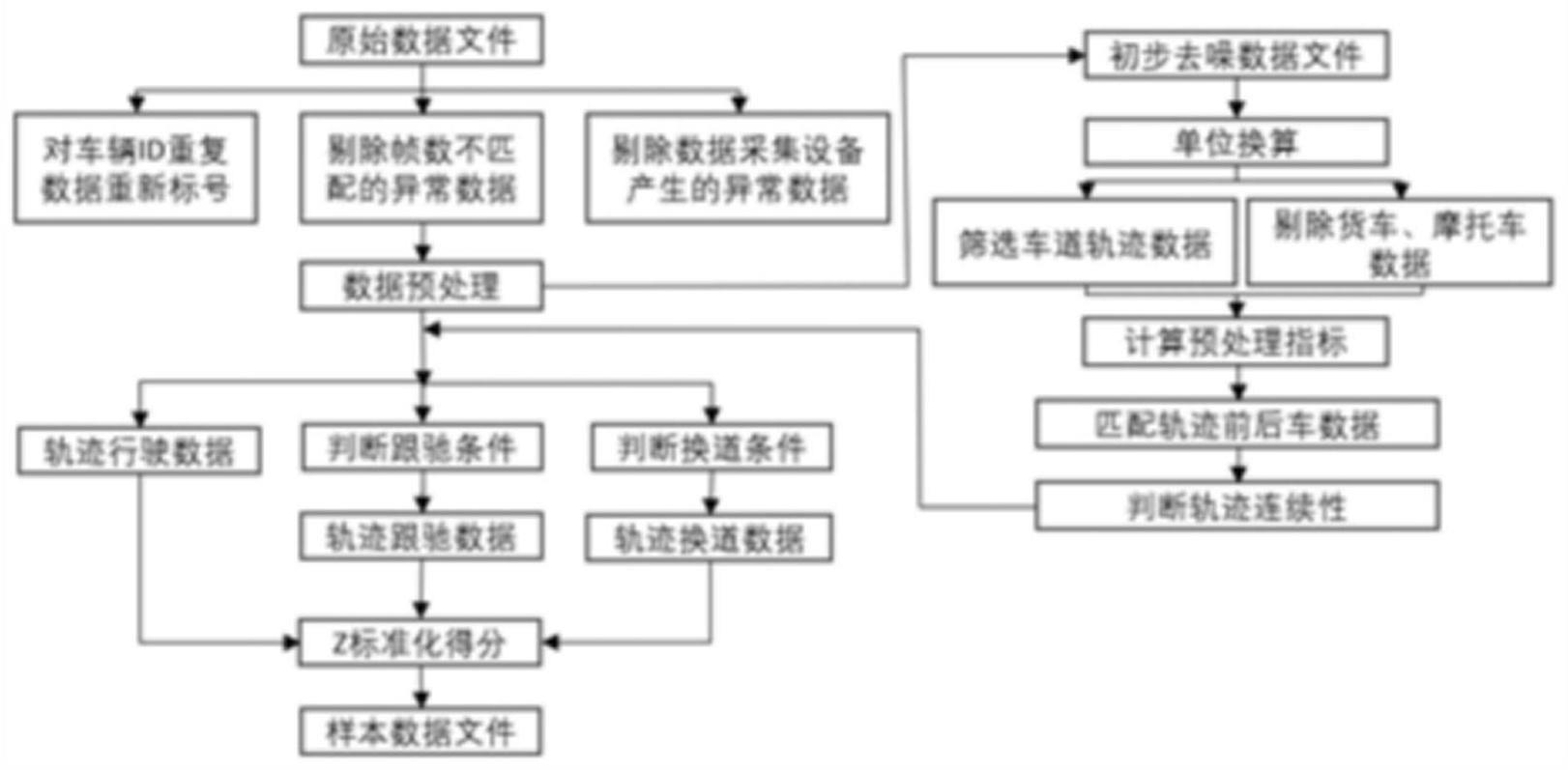
9、进一步地,步骤s1和s2中,由于ngsim数据集中的车辆行驶轨迹数据存在噪声和不连续等问题,因此,本发明通过python中的dataframe模块对轨迹数据进行数据分析及处理,为明确研究对象,对轨迹数据作如下处理:
10、s2001:基于dataframe模块对车辆行驶轨迹数据的异常值进行处理,将不同车辆轨迹下标记为相同车辆id的数据进行重新标号,剔除异常的车辆行驶轨迹数据;
11、s2002:将车辆行驶轨迹数据中的英制单位换算为国际标准单位,仅保留研究范围内小汽车数据作为研究对象;
12、s2003:根据车辆行驶轨迹数据坐标重新计算每辆车每一帧的速度、加速度与跟驰距离;
13、s2004:通过数据匹配寻找车辆的前后相邻车辆的信息,仅保留具有连续帧且能匹配到前后车信息的车辆作为跟驰风险度量指标的研究对象;
14、s2005:仅保留单次换道行为的车辆作为换道安全度量指标的研究对象;
15、s2006:采用z标准化得分法,对所筛选的车辆行驶轨迹数据进行异常判断并去除异常数据。
16、进一步地,步骤s2中,对于行驶稳定度量指标,考虑车辆轨迹横纵变化情况,采用横向位移变化量描述驾驶员横向驾驶行为,以加速度变化情况描述驾驶员纵向驾驶行为;对于跟驰风险度量指标,采用碰撞时间的倒数作为度量参数;对于换道安全度量指标,采用换道过程中前后车的空间距离与停车距离差值作为判断依据;
17、为实现对驾驶行为的实时安全度量指标,通过对比轨迹数据分析结果,采用40帧作为安全度量范围,以每辆车前40帧的驾驶行为综合判断作为此时的驾驶行为安全度量指标的结果。
18、进一步地,步骤s3中,行驶稳定度量指标,包括横向位移变化指标与纵向速度变化指标;横向位移变化指标,通过描述目标车在t帧前40帧内每一帧的横向位移偏移量的变异系数来评价驾驶员驾驶过程中横向稳定情况,横向位移变化指标越大,代表横向位移的离散程度越大,车辆蛇形驾驶的可能性越高,行驶稳定性越差,公式如下:
19、dx(t)=|x(t)-x(t-1)| (1)
20、
21、式中,r1(t)为横向位移变化指标、x(t)为目标车辆在t帧时的横向坐标、dx(t)为目标车辆在时间段[t-1,t]内横向偏移量、std为标准差,mean为均值、t为预设值;
22、纵向速度变化指标,通过计算每辆车前40帧目标车辆加速度与平均加速度的差值绝对值之和与总时间段相除后再开方来描述纵向速度的变化,纵向速度变化指标越大代表驾驶员行驶过程中出现速度不稳的可能性越大,行驶稳定性越差,公式如下:
23、
24、式中,r2(t)为纵向速度变化指标;ai表示目标车辆在t帧时的加速度;表示t时间段内目标车辆加速度的平均值;t为i帧前的时间段总长;t、i为预设值;
25、车辆跟驰风险度量指标采用碰撞时间ttc的倒数来描述,该指标值越大,碰撞时间ttc的值越小,跟驰过程中的风险越高,计算公式如下:
26、
27、式中,r3(t)为车辆跟驰风险度量指标;yf(t)、vf(t)分别为跟驰车辆的纵向坐标和纵向速度;yp(t)、vp(t)、lp(t)分别表示为被跟驰车辆的纵向坐标、纵向速度和车身长;
28、换道安全度量指标,首先计算换道目标车辆与其前后方相邻车辆之间的距离与最小安全距离之间的差值,定义为dss,当dss>0时,前后车之间的距离大于最小安全距离,前后车不会发生碰撞;当dss<0时,前后车之间的距离小于最小安全距离,换道安全度量指标用dss的绝对值与换道目标车辆速度的比值来刻画,通过计算目标车与其换道前同车道的前车、目标车道上的前车、目标车道上的后车的缺失反应时间,取最大值来描述换道安全情况,换道安全度量指标越大,缺失的反应时间就越长,换道安全程度越差,具体计算公式如下:
29、
30、
31、r4(t)=max(top(t),tcp(t),tcf(t)) (7)
32、式中,r4(t)为换道安全度量指标、u为分数率、g为重力加速度、τ为反应时间的预设值、vf(t)为跟驰过程中后车的纵向速度、t(t)为不发生碰撞驾驶员需要的缺失反应时间、top(t)表示目标车与同车道上的前车的dss绝对值与目标车纵向速度的比值、tcp(t)表示目标车与目标车道上前车的dss绝对值与目标车纵向速度的比值、tcf(t)表示目标车与目标车道上后车的绝对dss值与后车纵向速度的比值、max为取top(t)、tcp(t)和tcp(t)中的最大值。
33、进一步地,步骤s5中,根据权重计算每辆车在i帧时的驾驶行为安全评价,用于表示每辆车在i帧时所有驾驶行为综合得到的驾驶行为安全度量综合模型mor,其中i为预设值,计算公式及分布情况如下所示:
34、mor=0.397r1+0.310r2+0.082r3+0.210r4 (8)
35、式中,mor为驾驶行为安全度量综合模型;r1为横向位移变化指标、r2为纵向速度变化指标,两者并称行驶稳定度量指标;r3为跟驰风险度量指标;r4为换道安全度量指标。
36、进一步地,步骤s7中,对驾驶行为安全度量综合模型进行聚类分析,分为危险型、激进型、安全型与保守型四种驾驶行为,进而判断车辆行驶的安全性,结合4个度量指标的阈值分析结果,研究找到每类驾驶行为各个度量指标的评价情况,通过各个指标的阈值分析针对性地制定用于驾驶员调整驾驶行为的预警方案。
37、有益效果:本发明以车辆行驶轨迹数据为基础,结合车辆纵横向行驶特性,从行驶稳定性、跟驰与换道安全性等三个角度定义4个驾驶行为风险度量指标,并通过加权建立驾驶行为安全度量综合模型,再结合各指标阈值分析得到不同类型的不良驾驶行为评估结果,制定个性化、操作性强的预警方案,为道路交通系统中驾驶员的驾驶行为的评估和实时预警提供了技术支持。
- 还没有人留言评论。精彩留言会获得点赞!