用于自主车辆的牵引管理系统和方法与流程
本专利文件中描述的技术总体上涉及对自主车辆的牵引,且更特别地涉及用于使用自主车辆来牵引(多个)自主车辆的系统和方法。
背景技术:
1、自主车辆是能够在很少或没有用户输入的情况下感测其环境并导航的车辆。自主车辆使用感测装置(诸如,雷达、激光雷达、图像传感器等)来感测其环境。自主车辆系统进一步使用来自定位系统(包括全球定位系统(gps)技术)、导航系统、车辆对车辆通信、车辆对基础设施技术和/或线控驾驶系统的信息来导航车辆。
2、在一些情况下,自主车辆可由于例如车辆的一个或多个系统中的故障所致而不能继续驾驶。在这种情况下,可能期望将自主车辆牵引到能够评估和/或修理故障的位置。期望使另一自主车辆牵引有故障的自主车辆。
3、因此,期望提供用于使用自主车辆来管理对(多个)自主车辆的牵引的系统和方法。此外,结合附图考虑,从随后的详细描述和所附权利要求中,其他期望的特征和特性将变得显而易见。
技术实现思路
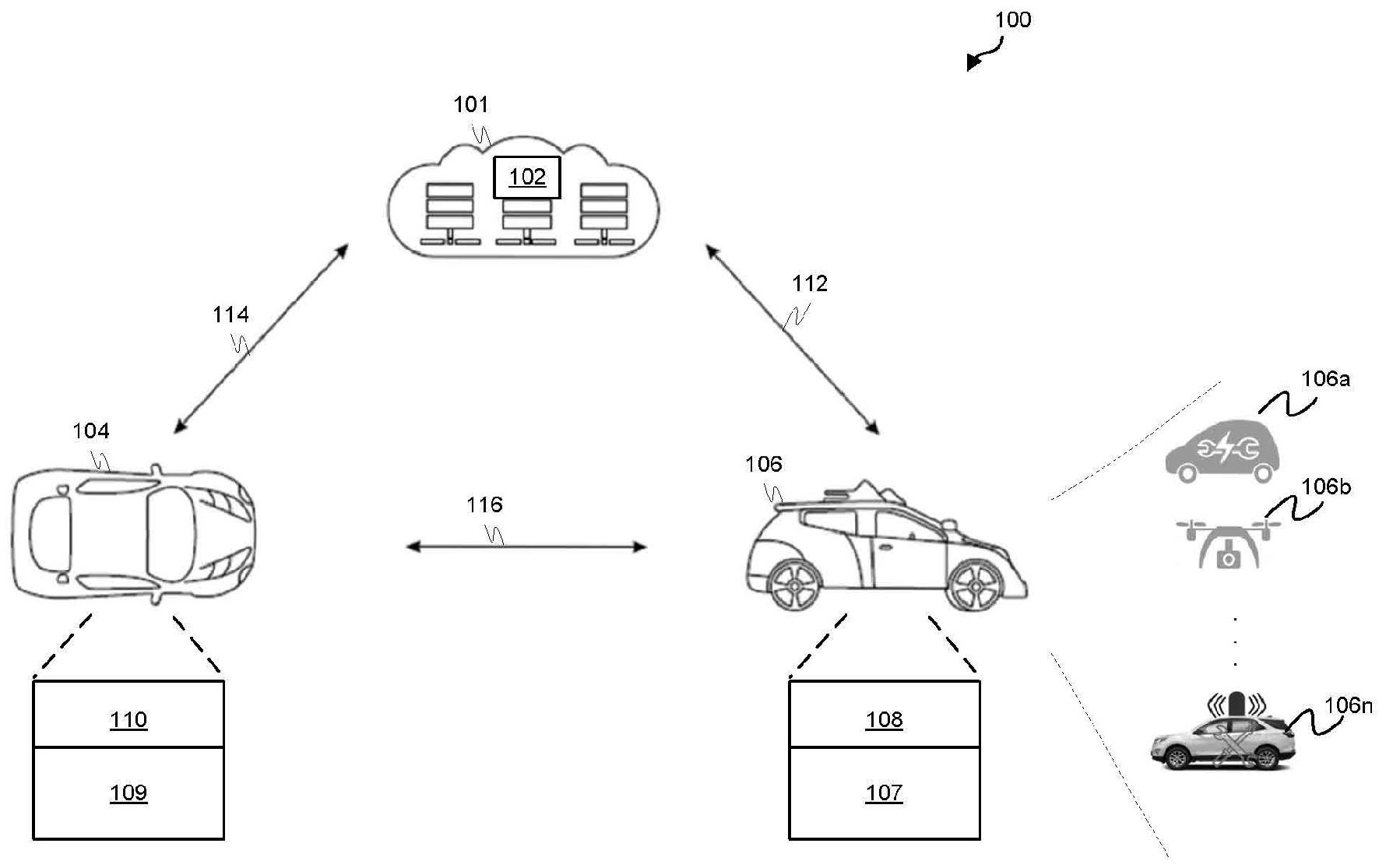
1、提供了用于远程交通系统的方法和系统,该远程交通系统包括第一自主车辆、至少一个第二自主车辆和远程交通服务器。所述至少一个第二自主车辆包括非暂时性计算机可读介质和一个或多个处理器,所述一个或多个处理器通过非暂时性计算机可读介质上的编程指令而被构造成:从远程交通服务器接收对牵引服务的请求,其中,该请求包括第一自主车辆的位置;基于该请求来定位和识别第一自主车辆;在第一自主车辆和第二自主车辆之间创建通信链路;基于该请求来选择中心化(centralized)牵引方法和基于投影的(projection-based)牵引方法中的至少一者;以及基于对中心化牵引方法和基于投影的牵引方法中的所述至少一者的选择来执行对第一自主车辆的自主牵引。
2、在各种实施例中,中心化牵引方法确定用于第一自主车辆的操作的控制命令并将这些控制命令传送给第一自主车辆。
3、在各种实施例中,基于投影的牵引方法确定用于操作第一自主车辆的传感器信息并将传感器数据传送给第一自主车辆。
4、在各种实施例中,基于投影的牵引方法确定用于操作第一自主车辆的感知信息并将感知数据传送给第一自主车辆。
5、在各种实施例中,处理器被构造成:监测对第一车辆的自主牵引;以及基于该监测对中心化牵引方法和基于投影的牵引方法中的所述至少一者的牵引参数进行调适。
6、在各种实施例中,处理器被构造成通过检测来自第一自主车辆和第二自主车辆的反馈信号中的不确定性来进行监测。
7、在各种实施例中,第二自主车辆是空中自主车辆。
8、在各种实施例中,第二自主车辆是基于地面的自主车辆。
9、在各种实施例中,第二自主车辆是传感器套件。
10、在各种实施例中,请求包括识别第一自主车辆的物理特性和第一自主车辆的故障代码的参数。
11、在另一实施例中,方法包括:从远程交通服务器接收对牵引服务的请求,其中,该请求包括第一自主车辆的位置;基于该请求来定位和识别第一自主车辆;在第一自主车辆和第二自主车辆之间创建通信链路;基于该请求来选择中心化牵引方法和基于投影的牵引方法中的至少一者;以及基于对中心化牵引方法和基于投影的牵引方法中的所述至少一者的选择来执行对第一自主车辆的自主牵引。
12、在各种实施例中,中心化牵引方法确定用于第一自主车辆的操作的控制命令并将这些控制命令传送给第一自主车辆。
13、在各种实施例中,基于投影的牵引方法确定用于操作第一自主车辆的传感器信息并将传感器数据传送给第一自主车辆。
14、在各种实施例中,基于投影的牵引方法确定用于操作第一自主车辆的感知信息并将感知数据传送给第一自主车辆。
15、在各种实施例中,该方法包括:监测对第一车辆的自主牵引;以及基于该监测对中心化牵引方法和基于投影的牵引方法中的所述至少一者的牵引参数进行调适。
16、在各种实施例中,监测包括检测来自第一自主车辆和第二自主车辆的反馈信号中的不确定性。
17、在各种实施例中,第二自主车辆是空中自主车辆。
18、在各种实施例中,第二自主车辆是基于地面的自主车辆。
19、在各种实施例中,第二自主车辆是传感器套件。
20、在各种实施例中,请求包括识别第一自主车辆的物理特性和该自主车辆的故障代码的参数。
21、方案1. 一种远程交通系统,其包括第一自主车辆、至少一个第二自主车辆和远程交通服务器,所述至少一个第二自主车辆包括非暂时性计算机可读介质和一个或多个处理器,所述一个或多个处理器通过所述非暂时性计算机可读介质上的编程指令而被构造成:
22、从所述远程交通服务器接收对牵引服务的请求,其中,所述请求包括所述第一自主车辆的位置;
23、基于所述请求来定位和识别所述第一自主车辆;
24、在所述第一自主车辆和所述第二自主车辆之间创建通信链路;
25、基于所述请求来选择中心化牵引方法和基于投影的牵引方法中的至少一者;以及
26、基于对所述中心化牵引方法和所述基于投影的牵引方法中的所述至少一者的选择来执行对所述第一自主车辆的自主牵引。
27、方案2. 根据方案1所述的远程交通系统,其中,所述中心化牵引方法确定用于所述第一自主车辆的操作的控制命令并将所述控制命令传送给所述第一自主车辆。
28、方案3. 根据方案1所述的远程交通系统,其中,所述基于投影的牵引方法确定用于操作所述第一自主车辆的传感器信息并将所述传感器数据传送给所述第一自主车辆。
29、方案4. 根据方案1所述的远程交通系统,其中,所述基于投影的牵引方法确定用于操作所述第一自主车辆的感知信息并将所述感知信息传送给所述第一自主车辆。
30、方案5. 根据方案1所述的远程交通系统,其中,所述处理器被构造成:监测对所述第一车辆的所述自主牵引;以及
31、基于所述监测对所述中心化牵引方法和所述基于投影的牵引方法中的所述至少一者的牵引参数进行调适。
32、方案6. 根据方案5所述的远程交通系统,其中,所述处理器被构造成通过检测来自所述第一自主车辆和所述第二自主车辆的反馈信号中的不确定性来进行监测。
33、方案7. 根据方案1所述的远程交通系统,其中,所述第二自主车辆是空中自主车辆。
34、方案8. 根据方案1所述的远程交通系统,其中,所述第二自主车辆是基于地面的自主车辆。
35、方案9. 根据方案1所述的远程交通系统,其中,所述第二自主车辆是传感器套件。
36、方案10. 根据方案1所述的远程交通系统,其中,所述请求包括识别所述第一自主车辆的物理特性和所述第一自主车辆的故障代码的参数。
37、方案11. 一种在远程交通系统中的方法,所述远程交通系统包括第一自主车辆、至少一个第二自主车辆和远程交通服务器,所述方法包括:
38、从所述远程交通服务器接收对牵引服务的请求,其中,所述请求包括所述第一自主车辆的位置;
39、基于所述请求来定位和识别所述第一自主车辆;
40、在所述第一自主车辆和所述第二自主车辆之间创建通信链路;
41、基于所述请求来选择中心化牵引方法和基于投影的牵引方法中的至少一者;以及
42、基于对所述中心化牵引方法和所述基于投影的牵引方法中的所述至少一者的选择来执行对所述第一自主车辆的自主牵引。
43、方案12. 根据方案11所述的方法,其中,所述中心化牵引方法确定用于所述第一自主车辆的操作的控制命令并将所述控制命令传送给所述第一自主车辆。
44、方案13. 根据方案11所述的方法,其中,所述基于投影的牵引方法确定用于操作所述第一自主车辆的传感器信息并将所述传感器数据传送给所述第一自主车辆。
45、方案14. 根据方案11所述的方法,其中,所述基于投影的牵引方法确定用于操作所述第一自主车辆的感知信息并将所述感知信息传送给所述第一自主车辆。
46、方案15. 根据方案11所述的方法,所述方法进一步包括:监测对所述第一车辆的所述自主牵引;以及
47、基于所述监测对所述中心化牵引方法和所述基于投影的牵引方法中的所述至少一者的牵引参数进行调适。
48、方案16. 根据方案15所述的方法,其中,所述监测包括检测来自所述第一自主车辆和所述第二自主车辆的反馈信号中的不确定性。
49、方案17. 根据方案11所述的方法,其中,所述第二自主车辆是空中自主车辆。
50、方案18. 根据方案11所述的方法,其中,所述第二自主车辆是基于地面的自主车辆。
51、方案19. 根据方案11所述的方法,其中,所述第二自主车辆是传感器套件。
52、方案20. 根据方案11所述的方法,其中,所述请求包括识别所述第一自主车辆的物理特性和所述第一自主车辆的故障代码的参数。
- 还没有人留言评论。精彩留言会获得点赞!