一种面向智能网联环境的机场场道车机冲突检测方法
1.本发明涉及机场场道安全运行技术领域,具体涉及一种面向智能网联环境的机场场道车机冲突检测方法。
背景技术:
2.随着近年来航空运输行业的迅速发展,机场布局日益复杂,机坪运行日益繁忙,机场场面运行环境愈加复杂,机坪各运行主体的冲突风险也在持续增大,因此针对机场场面开发的车机冲突检测方法具有重大的意义。
3.在运输环境日益复杂、机场场面交通流量不断增大的状况下,飞机、车辆在机场场道分布密集,运动轨迹复杂,存在大量相互交叉、汇聚的情况。传统的依靠管制人员和驾驶员目视判断是否会发生冲突的方法不够准确,导致未能及时避免剐蹭、碰撞等不安全事件。机场场面存在的大量不安全事件,表明仅依靠当前的场面监测设备和冲突探测方式已越来越不足以保障机场在复杂条件和大流量环境下的安全运行。
4.现阶段的机场场面冲突检测技术,对目标模型设置的粒度较粗,未能有效区分不同交通冲突场景下最小安全间隔的边界范围,导致冲突检测的准确度和精度都尚未达到理想水平。再者,虽然智能网联的相关技术已逐步应用于机场场面交通,但其主要应用仍局限于飞机和地面车辆在机场场道的通行路径规划方面,通过提前规划无冲突通行路线保障场面的安全运行。然而该技术在突发状况的实时冲突检测和预警方面应用深度尚不充足,实时感知与自我调整的能力较差,对复杂多变的运行场景中突发的潜在冲突应对能力不足。因此需要提出一种融合智能网联技术的新型机场场道冲突检测方法,通过更精确的冲突判断,应对日益复杂的机场场道运行场景。
技术实现要素:
5.本发明目的:在于提供一种面向智能网联环境的机场场道车机冲突检测方法,旨在解决当前机场场道车机冲突检测方式较为粗糙、冲突判定尺度不够精确的问题。
6.为实现以上功能,本发明设计一种面向智能网联环境的机场场道车机冲突检测方法,基于机载监测识别设备、机场场面监视系统、机载和车载监测设备、通讯系统,针对机场场道上的目标飞机,以及以目标飞机为中心,预设范围内的其他飞机或车辆,执行如下步骤s1-步骤s4,判定其他飞机或车辆是否会与目标飞机发生冲突;
7.步骤s1:基于机载监测识别设备,实时采集以目标飞机为中心,预设范围内的其他飞机或车辆的视频,基于视频检测和图像识别方法,获取该飞机或车辆的身份信息,根据身份信息获取该飞机或车辆对应的几何参数信息;
8.步骤s2:基于机场场面监视系统、机载和车载监测设备,检测以目标飞机为中心,预设范围内的其他飞机或车辆的位姿信息、运动状态信息;
9.步骤s3:基于步骤s1、步骤s2所获得的预设范围内的其他飞机或车辆对应的几何参数信息、位姿信息、运动状态信息,以及目标飞机的几何参数信息,分别构建目标飞机与
其他飞机或车辆的叠加安全保护区,基于叠加安全保护区,确定用于判断其他飞机或车辆是否会与目标飞机发生冲突的碰撞锥范围;
10.步骤s4:根据碰撞锥范围,判断目标飞机与其他飞机或车辆以当前运动状态是否会发生冲突,并将判断结果通过通讯系统传输至机场场面控制中心、各飞机和车辆。
11.作为本发明的一种优选技术方案:步骤s1中所述身份信息包括预设范围内的其他飞机或车辆的种类,对于车辆,其对应的几何参数信息包括车身长度、宽度、该类车辆的安全保护区范围;对于飞机,其对应的几何参数信息包括机身长度、机翼长度、该类飞机的安全保护区范围;其中,所述安全保护区范围为以车辆或飞机为中心的椭圆形区域。
12.作为本发明的一种优选技术方案:所述机场场面监视系统包括场面监视雷达、多点定位系统、运动检测雷达,机载和车载监测设备由多传感器融合系统组成,其中多传感器融合系统包括测距传感器、微波测速传感器、雷达检测器。
13.作为本发明的一种优选技术方案:步骤s2中所述位姿信息包括预设范围内的其他飞机或车辆的位置信息和姿态信息,其中位置信息为飞机或车辆在机场场面上所处位置,即以机场场面上预设参照点为原点建立坐标系,以飞机或车辆在该坐标系中的坐标作为位置信息;对于车辆,姿态信息为车辆车头指向方向,对于飞机,姿态信息为飞机机头指向方向;运动状态信息包括飞机或车辆的速度大小和方向角。
14.作为本发明的一种优选技术方案:步骤s3中确定碰撞锥范围的步骤如下:
15.步骤s31:根据目标飞机、预设范围内的其他飞机或车辆的几何参数信息中的安全保护区范围,获得目标飞机的椭圆形安全保护区范围的长轴d
ba
、短轴d
bb
,其他飞机或车辆的椭圆形安全保护区范围的长轴d
aa
、短轴d
ab
;
16.步骤s32:以目标飞机为中心,确定目标飞机与其他飞机或车辆的椭圆形叠加安全保护区,其长轴d
′a、短轴d
′b如下式:
[0017][0018]
步骤s33:以其他飞机或车辆为顶点,以两条经过该顶点,且分别与椭圆形叠加安全保护区边缘相切的直线所形成的锥形区域为碰撞锥范围,其中,两条直线分别位于目标飞机与其他飞机或车辆连线的两侧。
[0019]
作为本发明的一种优选技术方案:步骤s4中引入时间约束t
max
,碰撞锥范围定义如下式:
[0020][0021]
式中,evo
a|b
为目标飞机b与其他飞机或车辆a的碰撞锥范围,d
ab
为飞机b与其他飞机或车辆a的距离,为飞机b与其他飞机或车辆a的相对速度向量,θ1、θ2分别表示碰撞锥两侧边界的角度值,δ
ab
表示对应的角度;
[0022]
判断目标飞机与其他飞机或车辆的相对速度向量是否落在碰撞锥范围内,若是,则目标飞机与其他飞机或车辆会发生冲突,若否,则目标飞机与其他飞机或车辆不会发生冲突。
[0023]
有益效果:相对于现有技术,本发明的优点包括:
[0024]
(1)本发明可以有效地利用机场场面现有的众多监测设备,并利用智能网联环境提高运行主体之间的信息交互和运行主体对周围环境的信息感知能力,提出了一种精度更高的机场场道车机冲突检测方法;
[0025]
(2)本发明分析了飞机和地面车辆的外形特征,根据飞机安全保护区在不同方向上对安全距离要求不同的特点,将飞机和车辆的安全保护区边界设置为椭圆形。适应了机场场景的安全保护区的几何构造,提高了冲突检测判定依据的精度。
[0026]
(3)本发明改进了速度障碍法,从几何学角度对椭圆形安全保护区的冲突判定方式进行求解,解决了在不同相对位置和相对行驶方向场景下,安全保护区叠加和碰撞锥边界求解问题。
附图说明
[0027]
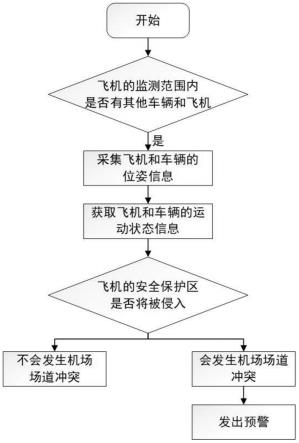
图1是根据本发明实施例提供的面向智能网联环境的机场场道车机冲突检测方法的流程图;
[0028]
图2是根据本发明实施例提供的椭圆形安全保护区示意图;
[0029]
图3是根据本发明实施例提供的车机冲突检测方法示意图。
具体实施方式
[0030]
下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
[0031]
参照图1,本发明实施例提供的一种面向智能网联环境的机场场道车机冲突检测方法,基于机载监测识别设备、机场场面监视系统、机载和车载监测设备、通讯系统,针对机场场道上的目标飞机,以及以目标飞机为中心,预设范围内的其他飞机或车辆,执行如下步骤s1-步骤s4,判定其他飞机或车辆是否会与目标飞机发生冲突;
[0032]
步骤s1:基于机载监测识别设备,实时采集以目标飞机为中心,预设范围内的其他飞机或车辆的视频,基于视频检测和图像识别方法,获取该飞机或车辆的身份信息,根据身份信息获取该飞机或车辆对应的几何参数信息;
[0033]
在具体的实施例中,所述视频检测和图像识别方法采用yolo系列算法、ssd算法、faster rcnn算法中的一种或多种。
[0034]
步骤s1中所述身份信息包括预设范围内的其他飞机或车辆的种类,对于车辆,其对应的几何参数信息包括车身长度、宽度、该类车辆的安全保护区范围;对于飞机,其对应的几何参数信息包括机身长度、机翼长度、该类飞机的安全保护区范围(单位:m);其中,所述安全保护区范围为以车辆或飞机为中心的椭圆形区域(单位:m)。
[0035]
所述机场场面监视系统包括场面监视雷达、多点定位系统(mlat)、运动检测雷达,机载和车载监测设备由多传感器融合系统组成,其中多传感器融合系统包括测距传感器、微波测速传感器、雷达检测器。
[0036]
步骤s2:基于机场场面监视系统、机载和车载监测设备,检测以目标飞机为中心,预设范围内的其他飞机或车辆的位姿信息、运动状态信息;
[0037]
步骤s2中所述位姿信息包括预设范围内的其他飞机或车辆的位置信息和姿态信息,其中位置信息为飞机或车辆在机场场面上所处位置,即以机场场面上预设参照点为原
点建立坐标系,以飞机或车辆在该坐标系中的坐标作为位置信息;对于车辆,姿态信息为车辆车头指向方向,对于飞机,姿态信息为飞机机头指向方向;运动状态信息包括飞机或车辆的速度大小和方向角。
[0038]
在一个实施例中,预设范围内的其他飞机或车辆a位置坐标为(xa,ya),目标飞机b位置坐标为(xb,yb),飞机或车辆a相对于目标飞机b的位置坐标(x
ab
,y
ab
);运动状态信息包括飞机或车辆的速度的大小v(单位为m/s)和方向角δ(单位为
°
)。
[0039]
步骤s3:基于步骤s1、步骤s2所获得的预设范围内的其他飞机或车辆对应的几何参数信息、位姿信息、运动状态信息,以及目标飞机的几何参数信息,分别构建目标飞机与其他飞机或车辆的叠加安全保护区,基于叠加安全保护区,确定用于判断其他飞机或车辆是否会与目标飞机发生冲突的碰撞锥范围;
[0040]
步骤s3中确定碰撞锥范围的步骤如下:
[0041]
步骤s31:参照图2,根据目标飞机、预设范围内的其他飞机或车辆的几何参数信息中的安全保护区范围,获得目标飞机的椭圆形安全保护区范围的长轴d
ba
、短轴d
bb
,其他飞机或车辆的椭圆形安全保护区范围的长轴d
aa
、短轴d
ab
,其中目标飞机、其他飞机或车辆的椭圆形安全保护区范围的长轴、短轴长度根据飞机或车辆的几何参数信息预设;
[0042]
步骤s32:以目标飞机为中心,确定目标飞机与其他飞机或车辆的椭圆形叠加安全保护区,其长轴d
′a、短轴d
′b如下式:
[0043][0044]
步骤s33:以其他飞机或车辆为顶点,以两条经过该顶点,且分别与椭圆形叠加安全保护区边缘相切的直线所形成的锥形区域为碰撞锥范围,其中,两条直线分别位于目标飞机与其他飞机或车辆连线的两侧。
[0045]
其中,碰撞锥范围边界的计算公式为:
[0046][0047]
其中,ω1、ω2表示碰撞锥两侧边界与其他飞机或车辆中心点连线的夹角角度,φ
ab
表示目标飞机b与其他飞机或车辆a连线的角度,(xa,ya)为预设范围内的其他飞机或车辆a位置坐标,(xb,yb)为目标飞机b位置坐标,(x
ab
,y
ab
)为飞机或车辆a相对于目标飞机b的位置坐标,k1、k2分别表示其他飞机或车辆a中心点与椭圆形叠加安全保护区边界两侧切线的斜率,γ1、γ2为以参数方程表示叠加安全保护区的椭圆方程时,两侧切点对应的参数值;
[0048]
步骤s4:根据碰撞锥范围,判断目标飞机与其他飞机或车辆以当前运动状态是否会发生冲突,并将判断结果通过通讯系统传输至机场场面控制中心、各飞机和车辆。
[0049]
由于本方法针对的是冲突在较短时间内将会发生的场景,因此增加一项时间约束条件,在步骤s4中引入时间约束t
max
,即限制检测到的冲突在指定的时间范围内会发生。
[0050]
碰撞锥范围定义如下式:
[0051][0052]
式中,evo
a|b
为目标飞机b与其他飞机或车辆a的碰撞锥范围,d
ab
为飞机b与其他飞机或车辆a的距离,为飞机b与其他飞机或车辆a的相对速度向量,θ1、θ2分别表示碰撞锥两侧边界的角度值,δ
ab
表示对应的角度;
[0053]
进行车机冲突判定:参照图3,图中阴影部分为碰撞锥范围,判断目标飞机与其他飞机或车辆的相对速度向量是否落在碰撞锥范围内,若是,则目标飞机与其他飞机或车辆会发生冲突,若否,则目标飞机与其他飞机或车辆不会发生冲突。
[0054]
车机冲突判定的计算公式为:
[0055][0056]
其中x1、y1分别表示其他飞机或车辆a的x轴、y轴方向速度,x2、y2表示目标飞机b的x轴、y轴方向速度;δ
ab
表示目标飞机b与其他飞机或车辆a的相对速度的方向角,va为其他飞机或车辆a的速度,vb为目标飞机b的速度,δa为其他飞机或车辆a的方向角,δb为目标飞机b的方向角;
[0057]
车机冲突的判断依据为:
[0058]
会发生冲突,否则不会发生
[0059]vab
为飞机b与其他飞机或车辆a的相对速度,d
max
为预设飞机b与其他飞机或车辆a的最大距离。
[0060]
本发明实施例提供的一种面向智能网联环境的机场场道车机冲突检测方法可以通过计算机程序来指令相关的硬件来完成,所述的指令通过机场场面的通讯系统实现传输。当前的机场场面通讯信号易受干扰,造成监测结果和相关指令的传输出现偏差。因此针对当前的机场场面智能网联环境建设,在层面维度上可以通过升级massive mimo、noma等5g技术,实现机场aeromac2.05g+宽带通信技术的应用落地。对于各个飞机和车辆则需要研发机载、车载等新型通信终端并完善多元网络协议转换。通过场面系统和运行主体通信设备两个层面的共同升级,构建多层级互联互通的一体化通信感知网络。
[0061]
上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于上述实施方式,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下做出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1