一种面向空中交通管制的亚轨道碎片危险区生成方法
1.本发明属于亚轨道航空器监测预警服务技术领域,尤其是涉及一种面向空中交通管制的亚轨道碎片危险区生成方法。
背景技术:
2.近年来,伴随着商业载人航天活动的蓬勃兴起,亚轨道飞行的商业化进程发展迅速。与此同时,亚轨道发射活动也愈加频繁,在未来可通过使用亚轨道航空器实现高效、低成本的航班化运输能力。然而,高密度的亚轨道发射活动将对民航空域航路网络的安全运行带来极大的潜在风险。当发生解体事故时,碎片在大气环境中所受的气动力具有一定的随机性,分布和落点较难预测,一旦与民航客机发生碰撞,将造成严重后果。
3.亚轨道碎片分布建模是危险区预测的关键技术,而有效的危险区预测是实施安全的空中交通管制的前提。当前,亚轨道航空器解体碎片场模型缺少对影响碎片传播过程的关键因素,如弹道系数、阻力系数等因素的详细阐述。此外,采用传统蒙特卡罗方法模拟亚轨道解体事故碎片的传播过程,运算量巨大不能满足空中交通管制部门实时计算的效率需求。
技术实现要素:
4.有鉴于此,本发明提供一种面向空中交通管制的亚轨道碎片危险区生成方法,该方法可以辅助空中管制人员快速划定碎片危险区。
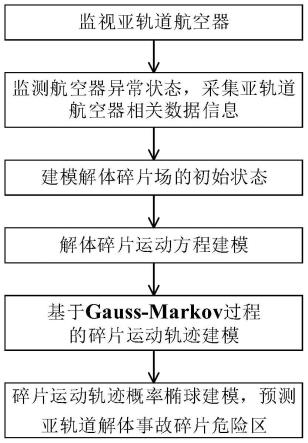
5.为达到上述目的,本发明的技术方案是这样实现的:一种面向空中交通管制的亚轨道碎片危险区生成方法,其步骤如下:
6.步骤一:监测亚轨道航空器状态;
7.步骤二:监测航空器异常状态,采集亚轨道航空器数据信息;
8.步骤三:建模解体碎片场的初始状态;
9.步骤四:解体碎片运动方程建模;
10.步骤五:基于gauss-markov过程的碎片运动轨迹建模;
11.步骤六:碎片运动轨迹概率椭球建模,预测亚轨道解体事故碎片危险区。
12.进一步的,步骤一具体包括:空中交通管制员根据亚轨道飞行计划与空管自动化系统的数据,通过空管一次监视雷达对航空器实施监测,获取监控数据。
13.进一步的,步骤二具体包括:空中交通管制员根据监控数据获取航空器飞行状态,当监测到飞行状态异常,采集航空器经度θ0、纬度φ0、几何高度z0、航向角ψ0、航迹角γ0、速度矢量v0等数据。
14.进一步的,步骤三具体包括:空中交通管制员基于航空器标准解体模型与采集到航空器的数据信息,模拟生成亚轨道碎片分布形态,通过幂函数定律计算亚轨道航空器解体后生成碎片的数量n和碎片等效直径d的分布;然后,以等效直径d为变量,利用概率分布模型确定碎片的面质比即碎片垂直于相对速度矢量的有效横截面积与质量比a/m、垂直于
相对速度矢量的碎片有效横截面积a和速度增量δv 的分布;最后,根据碎片面质比分布和有效横截面积确定碎片质量m,得到解体碎片云的初始状态。
15.进一步的,步骤四具体包括:将东北天坐标系下碎片的位置矢量 r=[x1,x2,x3]
t
和速度矢量v=[v1,v2,v3]
t
带入碎片传播轨迹的运动方程,其运动方程为:
[0016][0017][0018]
其中,re是地球半径;ω是碎片旋转角速度矢量;e3是第三标准单位向量;g是重力加速度;ξ表示的是由建模不确定性和干扰所引起的随机加速度矢量;ad是大气密度相关的瞬时加速度,其中这里β是弹道系数,其中其与大气阻力系数cd、碎片质量m、碎片垂直于相对速度矢量的横截面积a有关; v
rel
是碎片真实速度,其中v
rel
=v-w,这里v是碎片的速度矢量,w是风矢量;ρ是大气密度,其中大气密度ρ由解析形式大气密度指数模型表示:这里ρe=1.752kg/m3,h=6.7
×
103m。
[0019]
进一步的,步骤五具体包括:定义扩充状态矢量s,其中状态矢量s=[r
t
,v
t
]
t
则碎片方程重新表述为非线性方程:其中 f(s)表示关于矢量s的非线性函数表述碎片运动方程且忽略扰动的碎片速度以及位移矢量变化,b=[03×3,i3×3]
t
,这里03×3表示3
×
3的零矩阵, i3×3表示3
×
3的单位矩阵;定义扰动矢量z,其中扰动矢量z=s-sn,这里sn表示的是忽略ξ和影响碎片传播过程的其它不确定性因素而得到的标称轨迹,碎片运动方程等价转化为gauss-markov过程:
[0020][0021]
其中,时变系数矩阵
[0022]
进一步的,步骤六具体包括:根据协方差传播定律,状态矢量z(t) 的期望和协方差矩阵的时间演化均满足如下微分方程:
[0023][0024][0025]
其中,ξ(t)为白噪声密度;
[0026]
描述碎片分布的概率椭球的均值矢量和协方差矩阵r(t)为:
[0027][0028]
r(t)=cz(t)c
t
[0029]
其中,c=[i3×
303
×3],这里,v0由解体碎片云中碎片方向特征和速度增量的统计特征确定;
[0030]
根据碎片位置的均值和协方差矩阵r(t),其概率密度函数为:
[0031][0032]
若马氏距离设定为δ,则
[0033]
根据此二次型建立随时间变化的碎片危险区的等概率椭球曲面,获取碎片运动轨迹概率椭球。
[0034]
相对于现有技术,本发明所述的一种面向空中交通管制的亚轨道碎片危险区生成方法具有以下优势:
[0035]
1、本发明在民航空管自动化系统的数据与亚轨道飞行计划为基础上,通过雷达检测对亚轨道航空器进行监视,并当亚轨道航空器突发解体事故时,可准确评估解体事故碎片的时空分布特征,考虑解体时碎片的初始状态,复杂气象条件、地球自转效应、重力场变化以及碎片属性等因素,建立准确的亚轨道航空器解体碎片场模型;
[0036]
2、本发明鉴于蒙特卡洛模拟庞大的计算量不能满足实时应用,利用协方差算法解析形式的概率分布模型,快速预测和模拟飞行器爆炸瞬间碎片波及区域,辅助空中交通管制人员划定碎片危险区,提高空中交通管理效率,减轻空中交通管理人员的工作负荷,提高飞行安全。
附图说明
[0037]
构成本发明的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
[0038]
图1为本发明的一种面向空中交通管制的亚轨道碎片危险区生成设计方法流程图示意图。
具体实施方式
[0039]
需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
[0040]
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”等的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
[0041]
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语
在本发明中的具体含义。
[0042]
下面将参考附图并结合实施例来详细说明本发明。
[0043]
如图1所述,本发明提供一种面向空中交通管制的亚轨道碎片危险区生成方法,其步骤如下:
[0044]
a、监测亚轨道航空器
[0045]
空中交通管制员根据亚轨道飞行计划与空管自动化系统的数据,利用空管一次监视雷达对航空器实施监测,获取监控数据。
[0046]
b、监测航空器异常状态,采集亚轨道航空器数据信息
[0047]
空中交通管制员根据监控数据获取航空器飞行状态,当监测到飞行状态异常,采集航空器经度θ0、纬度φ0、几何高度z0、航向角ψ0、航迹角γ0、速度矢量v0等数据。
[0048]
c、建模解体碎片场的初始状态
[0049]
空中交通管制员基于航空器标准解体模型与采集到航空器的数据信息,模拟生成亚轨道碎片分布形态,通过幂函数定律计算亚轨道航空器解体后生成碎片的数量n和碎片等效直径d的分布;然后,以等效直径d为变量,利用概率分布模型确定碎片的面质比即碎片垂直于相对速度矢量的有效横截面积与质量比a/m、垂直于相对速度矢量的碎片有效横截面积a和速度增量δv的分布;最后,可以根据碎片面质比分布和有效横截面积确定碎片质量m,得到解体碎片云的初始状态。
[0050]
d、解体碎片运动轨迹建模
[0051]
将东北天坐标系下碎片的位置矢量r=[x1,x2,x3]
t
和速度矢量 v=[v1,v2,v3]
t
带入碎片传播轨迹的运动微分方程,其运动微分方程可表示为:
[0052][0053][0054]
其中,re是地球半径;ω是碎片旋转角速度矢量;e3是第三标准单位向量;g是重力加速度;ξ表示的是由建模不确定性和干扰所引起的随机加速度矢量;ad是大气密度相关的瞬时加速度,其中这里β是弹道系数,其中其与大气阻力系数cd、碎片质量m、碎片垂直于相对速度矢量的横截面积a有关; v
rel
是碎片真实速度,其中v
rel
=v-w,这里v是碎片的速度矢量,w是风矢量;ρ是大气密度,其中大气密度ρ由解析形式大气密度指数模型表示:这里ρe=1.752kg/m3,h=6.7
×
103m。
[0055]
e、基于gauss-markov过程的碎片运动轨迹建模
[0056]
定义扩充状态矢量s,其中状态矢量s=[r
t
,v
t
]
t
则碎片方程重新表述为非线性方程:其中f(s)表示关于矢量s的非线性函数表述碎片运动方程且忽略扰动的碎片速度以及位移矢量变化, b=[03×3,i3×3]
t
,这里03×3表示3
×
3的零矩阵,i3×3表示3
×
3的单位矩阵;定义扰动矢量z,其中扰动矢量z=s-sn,这里sn表示的是忽略ξ和影响碎片传播过程的其它不确定性因素而得到的标称轨迹,碎片运动方程等价转化为gauss-markov过程:
[0057][0058]
其中,时变系数矩阵
[0059]
f、碎片运动轨迹概率椭球建模,建模亚轨道解体事故碎片危险区
[0060]
根据协方差传播定律,状态矢量z(t)的期望和协方差矩阵的时间演化均满足如下微分方程:
[0061][0062][0063]
其中,ξ(t)为白噪声密度;
[0064]
描述碎片分布的概率椭球的均值矢量和协方差矩阵r(t)为:
[0065][0066]
r(t)=cz(t)c
t
[0067]
其中,c=[i3×
303
×3],这里,v0由解体碎片云中碎片方向特征和速度增量的统计特征确定;
[0068]
根据碎片位置的均值和协方差矩阵r(t),其概率密度函数为:
[0069][0070]
若马氏距离设定为δ,则根据此二次型建立随时间变化的碎片危险区的等概率椭球曲面,获取碎片运动轨迹概率椭球。
[0071]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1