一种智能停车器控制方法及其控制系统与流程
本发明属于车辆辅助系统,具体为一种智能停车器控制方法及其控制系统。
背景技术:
1、随着现代化社会的发展,家庭购买车辆的比例大提高,人们出行一般也会选择驾车。
2、车辆在停车时目前一般需要驾驶人根据经验进行停车判断以及操作,而对于经验较少的驾驶人来说,停车则成为难题,若判断失误,则可能导致安全事故的产生;因此,针对目前的状况,现需对其进行改进。
技术实现思路
1、针对上述情况,为克服现有技术的缺陷,本发明提供一种智能停车器控制方法及其控制系统,有效的解决了车辆在停车时目前一般需要驾驶人根据经验进行停车判断以及操作,而对于经验较少的驾驶人来说,停车则成为难题,若判断失误,则可能导致安全事故的产生的问题。
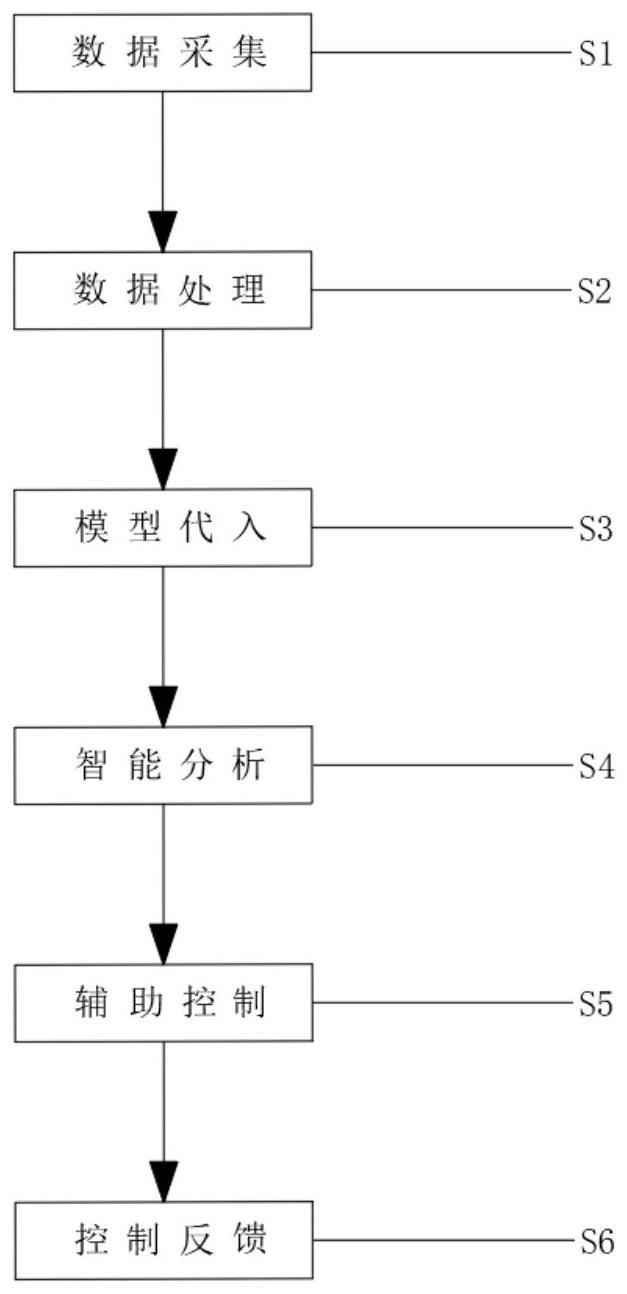
2、为实现上述目的,本发明提供如下技术方案:一种智能停车器控制方法,包括以下步骤:
3、s1:数据采集:通过搭载的定位系统、gis系统、状态检测设备、测速设备以及测距设备对车辆当前位置以及与周边物品距离进行采集,并在采集完毕后,根据定位系统和gis系统的数据,对当前车辆的实景地图进行定位模拟以及调取;
4、s2:数据处理:在上述步骤s1的基础上,对测速设备以及测距设备采集到的当前车辆速度数据以及距离数据进行数据预处理,所述数据预处理具体步骤包括:数据清洗、数据规约、数据转换、数据分析以及数据集成;
5、s3:模型代入:在上述步骤s2的基础上,将处理完毕后的数据代入数据预测模型中,并以此得到对应的预测结果,所述预测模型的建立以采集多组车辆速度数据以及距离数据作为学习数据;
6、s4:智能分析:在上述步骤s3的基础上,对预测模型预测的结果进行接收,同时搭载智能分析算法,综合预测结果以及车辆当前状态数据进行综合分析,同时对分析结果进行析出;
7、s5:辅助控制:在上述步骤s4的基础上,对分析结果进行接收,同时根据分析结果对比安全数据,判断对车辆的停车控制方式的选择,在进行具体选择时,具体包括:人工辅助控制以及智能调整控制,且在进行分析结果接收的同时,判断是否启动警报;
8、s6:控制反馈:在上述步骤s5的基础上,对车辆进行控制完毕后,再次采集车辆速度数据以及和周边物品距离数据,并结合智能分析算法进行控制完毕的反馈分析,最后将结果析出至中控端。
9、优选的,所述步骤s1中,定位系统具体采用gps卫星定位技术、全球卫星定位技术或北斗卫星定位技术中的一种或几种的组合;状态检测设备具体为温度传感器和压力传感器;测速设备具体为雷达微波测试仪;测距设备具体为测距仪。
10、优选的,所述步骤s2中,数据预处理的方法具体采用包括去除唯一属性、处理缺失值、属性编码、数据标准化正则化、特征选择或主成分分析中的一种或几种的组合。
11、优选的,所述步骤s3中,预测模型的建立具体步骤包括:①:对车辆速度数据以及距离数据进行采集;②:对数据进行预处理;③:将预处理完毕的数据代入训练算法进行学习,完成初步模型的建立;④:对初步模型进行验证,完成模型建立。
12、优选的,所述训练算法具体采用包括实例标准化训练算法、层标准化训练算法、直批标准化训练算法或元批量标准化训练算法中的一种或几种的组合。
13、优选的,所述步骤s4中,智能分析算法具体包括线性回归、逻辑回归、决策树、随机森林或人工神经网络中的一种或几种的组合。
14、优选的,所述步骤s5中,在进行停车控制方式的选择和是否启动警报的选择时,以预测数据是否超出安全数据为基准,而安全数据则通过人工手动设定。
15、优选的,一种智能停车器控制系统,包括中央管理系统,所述中央管理系统用于对所述智能停车器控制系统中运行的所有数据进行传输管控,所有数据包括检测数据以及控制数据;
16、信息采集系统:所述信息采集系统用于通过定位系统、gis系统、状态检测设备、测速设备以及测距设备进行车辆定位数据、状态数据、速度数据以及和周边物品距离数据的采集,并将采集到的数据进行传输;
17、数据处理系统:所述数据处理系统用于对上述信息采集系统中的数据进行接收,并对速度数据以及和周边物品距离数据进行数据清洗、数据规约、数据转换、数据分析以及数据集成的处理;
18、数据预测系统:所述数据预测系统用于将所述数据处理系统中处理完毕的数据代入预测模型,并得出预测结果;
19、实景调取系统:所述实景调取系统用于根据车辆定位数据和gis系统进行结合,对该车辆当前位置的实景地图进行标记并调取;
20、预测分析系统:所述预测分析系统用于根据所述数据预测系统以及所述实景调取系统的结果,结合智能分析算法,得到对该车辆的具体控制方法;
21、控制反馈系统:所述控制反馈系统用于根据所述预测分析系统得到的控制方法对车辆进行停车控制,并在控制完毕后,采集车辆速度数据以及和周边物品距离数据进行控制反馈。
22、与现有技术相比,本发明的有益效果是:1、通过对车辆当前位置以及与周边物品距离进行采集进行采集后,并对采集到的数据进行数据清洗、数据规约、数据转换、数据分析以及数据集成的处理,再将处理完成后的数据代入预测模型,由此可得到停车预测结果,并根据该预测结果进行后续停车的操作,通过提前进行结果预测,可为停车操作提供更精确的数据依据,由此提高停车的安全性,避免产生安全事故;
23、2、在得到预测结果过后,可通过选择人工辅助控制或智能调整控制,两种模式可满足不同人群对停车辅助的需求,更加智能化,在投入使用时,可为不同人群带来便利,提高其使用感受;
24、3、在停车过程中,始终对车辆状态进行监测,并对车辆状态进行分析,当车辆状态出现异常时,及时发出预警警报,由此可避免车辆状态影响停车操作。
技术特征:
1.一种智能停车器控制方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的一种智能停车器控制方法,其特征在于:所述步骤s1中,定位系统具体采用gps卫星定位技术、全球卫星定位技术或北斗卫星定位技术中的一种或几种的组合;状态检测设备具体为温度传感器和压力传感器;测速设备具体为雷达微波测试仪;测距设备具体为测距仪。
3.根据权利要求1所述的一种智能停车器控制方法,其特征在于:所述步骤s2中,数据预处理的方法具体采用包括去除唯一属性、处理缺失值、属性编码、数据标准化正则化、特征选择或主成分分析中的一种或几种的组合。
4.根据权利要求1所述的一种智能停车器控制方法,其特征在于:所述步骤s3中,预测模型的建立具体步骤包括:①:对车辆速度数据以及距离数据进行采集;②:对数据进行预处理;③:将预处理完毕的数据代入训练算法进行学习,完成初步模型的建立;④:对初步模型进行验证,完成模型建立。
5.根据权利要求4所述的一种智能停车器控制方法,其特征在于:所述训练算法具体采用包括实例标准化训练算法、层标准化训练算法、直批标准化训练算法或元批量标准化训练算法中的一种或几种的组合。
6.根据权利要求1所述的一种智能停车器控制方法,其特征在于:所述步骤s4中,智能分析算法具体包括线性回归、逻辑回归、决策树、随机森林或人工神经网络中的一种或几种的组合。
7.根据权利要求1所述的一种智能停车器控制方法,其特征在于:所述步骤s5中,在进行停车控制方式的选择和是否启动警报的选择时,以预测数据是否超出安全数据为基准,而安全数据则通过人工手动设定。
8.根据权利要求1-7中任一项所述的一种智能停车器控制系统,其特征在于:包括中央管理系统,所述中央管理系统用于对所述智能停车器控制系统中运行的所有数据进行传输管控,所有数据包括检测数据以及控制数据;
技术总结
本发明涉及车辆辅助系统技术领域,且公开了一种智能停车器控制方法及其控制系统;本智能停车器控制方法包括以下步骤:S1:数据采集;S2:数据处理;S3:模型代入;S4:智能分析;S5:辅助控制;S6:控制反馈,本发明通过对车辆当前位置以及与周边物品距离进行采集进行采集后,并对采集到的数据进行处理,再将处理完成后的数据代入预测模型,由此可得到停车预测结果,并根据该预测结果进行后续停车的操作,通过提前进行结果预测,可为停车操作提供更精确的数据依据,由此提高停车的安全性,避免产生安全事故,可通过选择人工辅助控制或智能调整控制,两种模式可满足不同人群对停车辅助的需求。
技术研发人员:王勇
受保护的技术使用者:广州金王科技股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!