车辆行驶环境感知方法、装置、计算机设备、介质及产品与流程
本技术涉及交通,特别是涉及一种车辆行驶环境感知方法、装置、计算机设备、介质及产品。
背景技术:
1、交通违规事件处理是道路交通中经常发生的事件,主要包含交通违规事件检测、交通违规事件预测和交通违规事件避障。其中,交通违规事件包括压实线、越双黄线、机动车停车、逆行、超速、慢行、违规变道等等事件,这些事件将会严重影响道路交通的正常运作,而对违规事件进行及时检测、违规事件进行提前预测以及对交通违规事件进行避障就显得极为重要。
2、相关技术中,通常采用基于相机的目标检测方法对道路上的交通违规事件进行处理。但是,相关技术中采用相机感知到的车辆的行驶环境感知结果精准度较低,从而会导致交通违规事件处理结果不准确。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够提高确定的车辆的行驶环境感知结果精准度的车辆行驶环境感知方法、装置、计算机设备、介质及产品。
2、第一方面,本技术提供了一种车辆行驶环境感知方法,目标车辆上安装有多个相机和多个雷达设备,多个相机分别安装于目标车辆的第一侧和第二侧,多个雷达设备分别安装于目标车辆的第一侧,且不同相机之间存在共视区域,该方法包括:
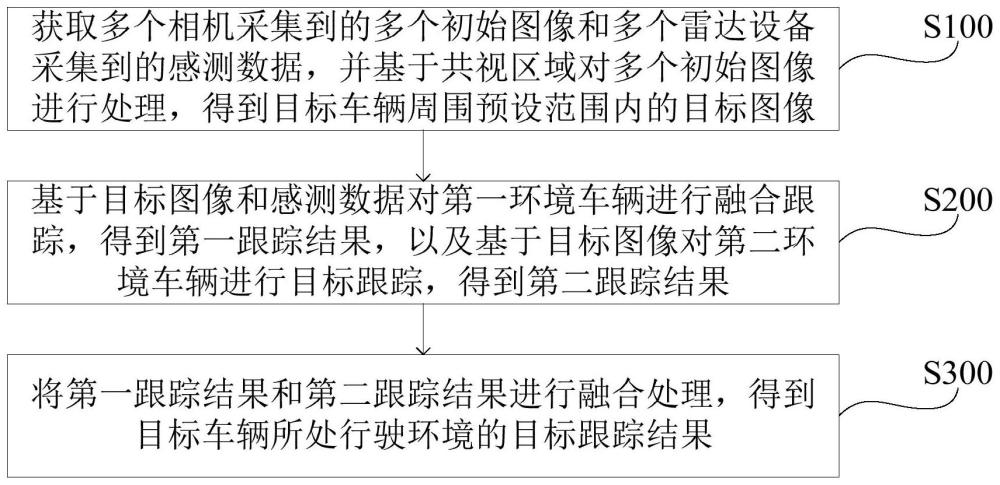
3、获取多个相机采集到的多个初始图像和多个雷达设备采集到的感测数据,并基于共视区域对多个初始图像进行处理,得到目标车辆周围预设范围内的目标图像;预设范围为预设距离内的全覆盖范围;
4、基于目标图像和感测数据对第一环境车辆进行融合跟踪,得到第一跟踪结果,以及基于目标图像对第二环境车辆进行目标跟踪,得到第二跟踪结果;第一环境车辆位于目标车辆的第一侧,第二环境车辆位于目标车辆的第二侧;第一侧包括目标车辆的前侧和后侧,第二侧包括目标车辆的左侧和右侧;
5、将第一跟踪结果和第二跟踪结果进行融合处理,得到目标车辆所处行驶环境的目标跟踪结果。
6、在其中一个实施例中,基于目标图像对第二环境车辆进行目标跟踪,得到第二跟踪结果,包括:
7、对目标图像进行感知处理,得到第二环境车辆的感知信息;
8、对各初始图像进行检测处理,确定第二环境车辆的方位信息;
9、根据预先获取到的第二环境车辆的参考速度和第二环境车辆的方位信息,获取第二环境车辆在不同行驶位置的实时速度;
10、基于第二环境车辆的感知信息和实时速度,确定第二跟踪结果。
11、在其中一个实施例中,上述方法还包括:
12、基于目标跟踪结果,对环境车辆进行违规事件处理,得到违规事件处理结果;环境车辆包括第一环境车辆和第二环境车辆,违规事件处理包括违规事件检测处理和违规事件避障处理中的至少一种。
13、在其中一个实施例中,上述方法还包括:
14、在检测到环境车辆为发生违规事件的情况下,检测违规事件是否影响目标车辆的行驶状态;
15、若违规事件不影响目标车辆的行驶状态,则对违规事件进行记录,并将违规事件的相关信息发送给交通违规管理系统进行存档;
16、其中,相关信息包括违规事件的类型、发生违规事件的环境车辆的行驶信息和违规事件的相关图像。
17、在其中一个实施例中,上述方法还包括:
18、若违规事件影响目标车辆的行驶状态,则触发避障处理请求;避障处理请求用于指示执行对第一环境车辆和/或第二环境车辆进行违规事件避障处理;
19、对违规事件进行记录,并对违规事件的相关信息发送给交通违规管理系统进行存档。
20、在其中一个实施例中,目标跟踪结果包括位置信息;
21、基于目标跟踪结果,对环境车辆进行违规事件处理,得到违规事件处理结果,包括:
22、根据目标图像对环境车辆进行违规事件检测处理,得到违规事件检测结果;
23、通过违规事件检测结果,判断是否需要对环境车辆进行候选检测处理得到第一判断结果,并基于第一判断结果和目标跟踪结果获取违规事件处理结果;候选检测处理包括违规事件预测处理和/或违规事件避障处理。
24、在其中一个实施例中,违规事件包括逆行、压实线、越双黄线和驶入禁行区域;则根据目标图像对环境车辆进行违规事件检测处理,得到违规事件检测结果,包括:
25、对目标图像中的环境车辆以及交通标线进行检测处理,得到环境车辆的位置信息和交通标线的位置信息;
26、根据环境车辆的位置信息和交通标线的位置信息,对环境车辆进行违规事件检测处理得到违规事件检测结果。
27、在其中一个实施例中,通过违规事件检测结果,判断是否需要对环境车辆进行候选检测处理得到第一判断结果,并基于第一判断结果和目标跟踪结果获取违规事件处理结果,包括:
28、若违规事件检测结果为未发生违规事件,则确定第一判断结果为需要对环境车辆进行候选检测处理;
29、根据环境车辆的目标跟踪结果,对环境车辆进行违规事件预测处理,得到违规事件预测结果;
30、基于违规事件预测结果,判断是否需要对环境车辆进行违规事件避障处理得到第二判断结果,并根据第二判断结果确定违规事件处理结果。
31、在其中一个实施例中,上述方法还包括:
32、若违规事件检测结果为发生违规事件,则根据环境车辆的目标跟踪结果,对环境车辆进行违规事件避障处理,得到违规事件避障结果。
33、在其中一个实施例中,违规事件处理结果包括违规事件避障结果;基于违规事件预测结果,判断是否需要对环境车辆进行违规事件避障处理得到第二判断结果,并根据第二判断结果确定违规事件处理结果,包括:
34、若违规事件预测结果为存在发生违规事件的意图,则确定第二判断结果为需要对目标车辆进行违规事件避障处理;
35、根据环境车辆的目标跟踪结果,对环境车辆进行违规事件避障处理,得到违规事件避障结果。
36、在其中一个实施例中,上述方法还包括:
37、若违规事件预测结果为不存在发生违规事件的意图,则继续执行对环境目标车辆进行违规事件处理的步骤。
38、在其中一个实施例中,违规事件包括超速事件,则基于目标跟踪结果,对环境车辆进行违规事件处理,得到违规事件处理结果,包括:
39、基于环境车辆的目标跟踪结果,对环境车辆进行违规事件检测处理得到违规事件检测结果;
40、基于违规事件检测结果,判断是否需要对环境车辆进行候选检测处理得到第三判断结果,并根据第三判断结果确定违规事件处理结果;候选检测处理包括违规事件预测处理和/或违规事件避障处理。
41、第二方面,本技术提供了一种车辆行驶环境感知装置,目标车辆上安装有多个相机和多个雷达设备,多个相机分别安装于目标车辆的第一侧和第二侧,多个雷达设备分别安装于目标车辆的第一侧,且不同相机之间存在共视区域,上述装置包括:
42、图像处理模块,用于获取多个相机采集到的多个初始图像和多个雷达设备采集到的感测数据,并基于共视区域对多个初始图像进行处理,得到目标车辆周围预设范围内的目标图像;预设范围为预设距离内的全覆盖范围;
43、跟踪结果获取模块,用于基于目标图像和感测数据对第一环境车辆进行融合跟踪,得到第一跟踪结果,以及基于目标图像对第二环境车辆进行目标跟踪,得到第二跟踪结果;第一环境车辆位于目标车辆的第一侧,第二环境车辆位于目标车辆的第二侧;第一侧包括目标车辆的前侧和后侧,第二侧包括目标车辆的左侧和右侧;
44、目标跟踪结果获取模块,用于将第一跟踪结果和第二跟踪结果进行融合处理,得到目标车辆所处行驶环境的目标跟踪结果。
45、第三方面,本技术还提供了一种计算机设备,充电控制设备包括存储器和处理器,存储器存储有计算机程序,处理器执行计算机程序时实现上述第一方面的任一项的方法的步骤。
46、第四方面,本技术还提供了一种计算机可读存储介质,计算机可读存储介质上存储有计算机程序,计算机程序被处理器执行时实现上述第一方面的任一项的方法的步骤。
47、第五方面,本技术还提供了一种计算机程序产品,计算机程序产品包括计算机程序,该计算机程序被处理器执行时实现上述第一方面的任一项的方法的步骤。
48、上述车辆行驶环境感知方法、装置、计算机设备、介质及产品,包括:获取多个相机采集到的多个初始图像和多个雷达设备采集到的感测数据,并基于共视区域对多个初始图像进行处理,得到目标车辆周围预设范围内的目标图像,基于目标图像和感测数据对第一环境车辆进行融合跟踪,得到第一跟踪结果,以及基于目标图像对第二环境车辆进行目标跟踪,得到第二跟踪结果,然后将第一跟踪结果和第二跟踪结果进行融合处理,得到目标车辆所处行驶环境的目标跟踪结果。采用上述方法可以将车辆上安装的相机和雷达设备作为车辆行驶环境感知系统,采用相机与雷达设备对应的融合感知技术提高确定出的车辆周围其它环境车辆的跟踪结果的准确性,在此基础上,还可以基于跟踪结果对发生交通事故的车辆进行及时处理,避免该车辆引发更多可避免的类似交通事故;同时,该方法采用的车辆行驶环境感知系统的结构简单,从而在提高车辆行驶环境感知结果的基础上,使得车辆行驶环境感知方法易实现,还可以提高车辆行驶环境感知方法的广泛使用性。
- 还没有人留言评论。精彩留言会获得点赞!