用于预定区域的对车辆行驶的规控方法和规控系统与流程
本发明涉及一种用于预定区域的对车辆行驶的规控方法和规控系统,特别是在矿区内对无人驾驶矿卡的行驶进行规控的方法和系统。
背景技术:
1、在现有技术中,车辆、尤其是无人驾驶矿卡安装有感知模块,感知模块检测该车辆周边环境中的障碍物,矿区中的障碍物例如为石块,土块、人员、路牌、车辆等。当感知模块能够以较高的置信度识别出检测到的障碍物的类别时,可由车辆上的规划模块针对该障碍物提供合适的行驶决策。
2、矿卡作为一种特殊的卡车具有运载能力大的特点。由于矿卡自身的运行特点,其在矿区内的行驶具有特殊的要求,例如不允许长时间低速空转;不得突然改变油门的位置;不允许在道路上随意停车;不准突然转弯等。矿区中存在粉尘大、道路不规则且不平整的特殊环境,这些影响了车辆上的无人驾驶感知模块识别障碍物的能力。此外,由于训练数据样本的局限性,车辆上的感知模块无法准确辨别所有检测到的障碍物。当感知模块检测到不能够辨别的障碍物时,车辆直接停车等待障碍物被清除/移开,这将造成不必要的停车等待时间。由于上述这些困难,使得难以为矿卡在矿区中的行驶轨迹提供最优解决方法。
3、因而,需要提供一种对车辆行驶的规控方法,以至少部分地解决上述问题。
技术实现思路
1、本发明的目的是提供一种用于预定区域的对车辆行驶的规控方法,其能够利用后台系统的强大运算能力以及必要时通过人工干预缓和车辆上的感知系统由于认知局限性而带来的影响,从而能够基于更准确的障碍物识别信息为车辆提供正确且可靠的行驶决策。借助该方法还能够及时地为车辆排除障碍,保障车辆正常运行和人员安全。
2、根据本发明的一个方面,提供了一种用于预定区域的对车辆行驶的规控方法,包括:
3、检测所述车辆周围的障碍物并将检测到、但未能辨别或者以低置信度辨别的障碍物的障碍物检测信息发送给后台系统,
4、在所述后台系统中得出障碍物识别信息并且给出建议的车辆行驶决策,
5、将所述障碍物识别信息和建议的车辆行驶决策发送给所述车辆。
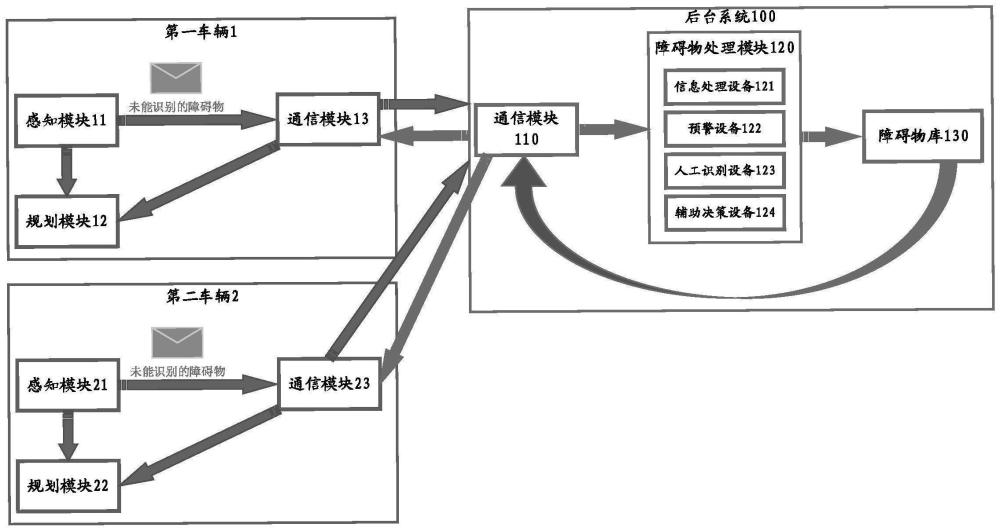
6、根据本发明的另一个方面,还提供了一种用于预定区域的对车辆行驶的规控系统,所述规控系统包括:
7、位于所述车辆上的感知系统,所述感知系统检测车辆周围的障碍物,
8、后台系统,所述感知系统检测到的、但是未能辨别或者以低置信度辨别的障碍物的障碍物检测信息被发送给所述后台系统,
9、所述后台系统辨别障碍物,得出障碍物识别信息并且给出建议的车辆行驶决策,
10、所述后台系统将所述障碍物识别信息和建议的车辆行驶决策发送给所述车辆。
11、根据本发明的规控系统和规控方法能够通过后台系统为车辆正确地辨别障碍物类别且额外地提供建议的车辆行驶决策,降低规划模块求解难度,从而得到全局最优解决方案。后台系统的参与能够让后台更及时发现路况的异常,作出相应的路权设置方案。
技术特征:
1.一种用于预定区域的对车辆行驶的规控方法,其特征在于,包括:
2.根据权利要求1所述的规控方法,其特征在于,所述车辆和所述后台系统(100)分别包括通信模块,经由通信模块能够在所述车辆和所述后台系统(100)之间进行数据交换。
3.根据权利要求1或2所述的规控方法,其特征在于,将所述障碍物识别信息和建议的车辆行驶决策发送给所述预定区域中的所有车辆。
4.根据权利要求1或2所述的规控方法,其特征在于,所述障碍物识别信息包括障碍物类别和障碍物位置及尺寸。
5.根据权利要求1或2所述的规控方法,其特征在于,所述车辆包括感知模块(11),所述感知模块检测车辆周围的障碍物并自动地辨别障碍物,所述感知模块未能辨别或者以低置信度辨别的障碍物的障碍物检测信息被发送给后台系统(100)。
6.根据权利要求5所述的规控方法,其特征在于,所述后台系统(100)包括信息处理设备(121),在所述后台系统(100)中通过所述信息处理设备(121)自动地辨别所述障碍物。
7.根据权利要求6所述的规控方法,其特征在于,在所述障碍物不能以高的置信度被所述信息处理设备(121)自动地辨别时,在所述后台系统(100)中通过人工辨别障碍物来得出障碍物识别信息并且给出建议的车辆行驶决策。
8.根据权利要求1或2所述的规控方法,其特征在于,所述后台系统(100)包括预警设备(122),所述规控方法还包括:
9.根据权利要求5所述的规控方法,其特征在于,所述后台系统(100)包括障碍物库(130),所述障碍物识别信息和建议的车辆行驶决策存储在所述障碍物库(130)中,所述规控方法还包括:
10.根据权利要求9所述的规控方法,其特征在于,在清除所述障碍物之后,在所述障碍物库(130)和车辆端删除与已经清除的障碍物对应的障碍物识别信息和建议的车辆行驶决策。
11.根据权利要求1所述的规控方法,其特征在于,所述车辆包括规划模块(12),所述规划模块能够基于所述障碍物识别信息和建议的车辆行驶决策提供最终的车辆行驶决策指示车辆执行动作。
12.一种用于预定区域的对车辆行驶的规控系统,所述规控系统包括:
13.根据权利要求12所述的规控系统,其特征在于,所述规控系统执行根据权利要求1至11中任一项所述的规控方法。
技术总结
一种用于预定区域的对车辆行驶的规控方法和规控系统,规控方法包括:检测车辆周围的障碍物并将检测到但未能识别或者识别置信度低的障碍物的障碍物检测信息发送给后台系统,在所述后台系统中得出障碍物识别信息并且给出建议的车辆行驶决策,将所述障碍物识别信息和建议的车辆行驶决策发送给所述车辆。本发明利用后台系统的强大运算能力以及必要时通过人工干预缓和了车辆上的感知系统由于认知局限性而带来的影响,从而能够为车辆提供正确且可靠的行驶决策。
技术研发人员:吕根波,吴向昌,陈维军,张辉,宋建平
受保护的技术使用者:卡特彼勒公司
技术研发日:
技术公布日:2024/5/9
- 还没有人留言评论。精彩留言会获得点赞!